關於麥克風的參數介紹 - 駐極體麥克風(ECM)和硅麥(MEMS)
1、麥克風的分類
1.1、動圈式麥克風(Dynamic Micphone)
原理:基本構造包含線圈、振膜、永久磁鐵三部分。當聲波進入麥克風,振膜受到聲波的壓力而產生振動,與振膜在一起的線圈則開始在磁場中移動,根據法拉第的楞次定律,線圈會產生感應電流。
特性:動圈式麥克風因含有磁鐵和線圈,不夠輕便、靈敏度較低、高低頻響應表現較差;優點是聲音較柔潤,適合用來收錄人聲。
應用:KTV場所。
1.2、電容式麥克風(Condenser Micphone)
原理:根據電容兩片隔板間距離的改變來產生電壓變化。當聲波進入麥克風,振膜產生振動,使得振動膜和基板之間的距離會隨着振動而改變,於是基板間的電容會變,根據Q=C*V(電容式麥克風中電容極板的電壓會維持一個定值)得到變化的電荷量Q。
特性:靈敏度高,常用於高品質的錄音。
應用:消費電子、錄音室。
1.3、鋁帶式麥克風(Ribbon Micphone)
原理:在磁鐵兩極間放入通常是鋁製的波浪狀金屬箔帶,金屬薄膜受聲音震動時,因電磁感應而產生信號。
1.4、碳精麥克風(Carbon Micphone)
2、兩種常用電容式麥克風的對比:駐極體電容麥克風(ECM)和微機電麥克風(MEMS Micphone)
2.1、駐極體電容麥克風(Electret Condenser Micphone)
原理:駐極體麥克風使用了可保有永久電荷的駐極體物質,不需要再對電容供電。(若駐極體麥克風中內建放大電路,則需要供電)
優點:技術成熟、價格便宜
缺點:體積大,不方便SMT、引線長,造成信號衰減、生產工序多,一致性差、靈敏度不穩定
2.2、微機電麥克風(MEMS Micphone)
原理:微機電麥克風也稱麥克風晶片或硅麥克風,硅麥一般都整合了前置放大器,甚至有些硅麥會整合模擬數位轉換器,直接輸出數位信號,成爲數位麥克風。
優點:體積小,可SMT、產品穩定性好
缺點:價格較高
備註:一般情況下,我們把整合了前置放大器或者模擬數位轉換器的麥克風稱爲拾音器(pickup)。
3、麥克風的效能參數
3.1、指向性(Directivity)
指向性描述麥克風對於不同角度聲音的靈敏度,規格上常用如下的polar pattern表示,在每個示意圖中,虛線圓形的上方代表麥克風前方,下方代表麥克風的後方。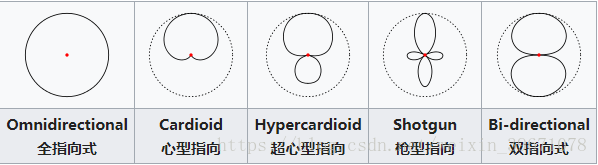
3.2、靈敏度級(Sensitivity)
聲壓:指聲波通過某種媒質時,由振動產生的壓強改變數。單位爲Pa、μbar。1μbar=0.1Pa。
參考聲壓:P(ref) = 20μPa。
聲壓級(SPL):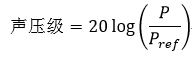
例:1Pa聲壓的聲壓級爲
靈敏度:指麥克風的開路電壓與作用在其膜片上的聲壓之比。單位爲mv/pa、mv/ubar。1mv/ubar = 10mv/pa。
參考靈敏度:Mr = 1V/Pa
靈敏度級: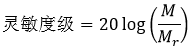
例:1V/Pa靈敏度的靈敏度級爲
3.3、訊雜比(SNR)
信號與噪聲的比例。
3.4、總諧波失真(THD)
總諧波失真是指輸出信號比輸入信號多出的諧波成分。諧波失真是系統不是完全線性造成的。所有附加諧波電平之和稱爲總諧波失真。總諧波失真與頻率有關,一般來說,1khz頻率處的總諧波失真最小,因此不少產品均以該頻率的失真作爲它的指標。
公式1:
上式中,符號G表示諧波分量的有效值,它將按要求在表示電流時被I代替,在表示電壓時被U代替,H的值在與限制有關的每一個標準中給出。按照上述定義,THD不包含簡諧波,並且,有一固定的諧波上限。
公式2:
上式中,Q爲總有效值,Q1爲基波有效值,可代表電壓或電流,按照上述定義,THD包含間諧波和直流分量。
3.5、等效輸入噪聲(EIN)
無外聲場時,僅由傳聲器固有噪聲引起的輸出電壓,可以看作能產生相同有效值輸出電壓的外部聲壓級。
3.6、電源抑制比(PSRR)
電源抑制比(PSRR)是輸入電源變化量(以伏爲單位)與轉換器輸出變化量(以伏爲單位)的比值,常用分貝表示。
3.7、輸出阻抗(Zout)
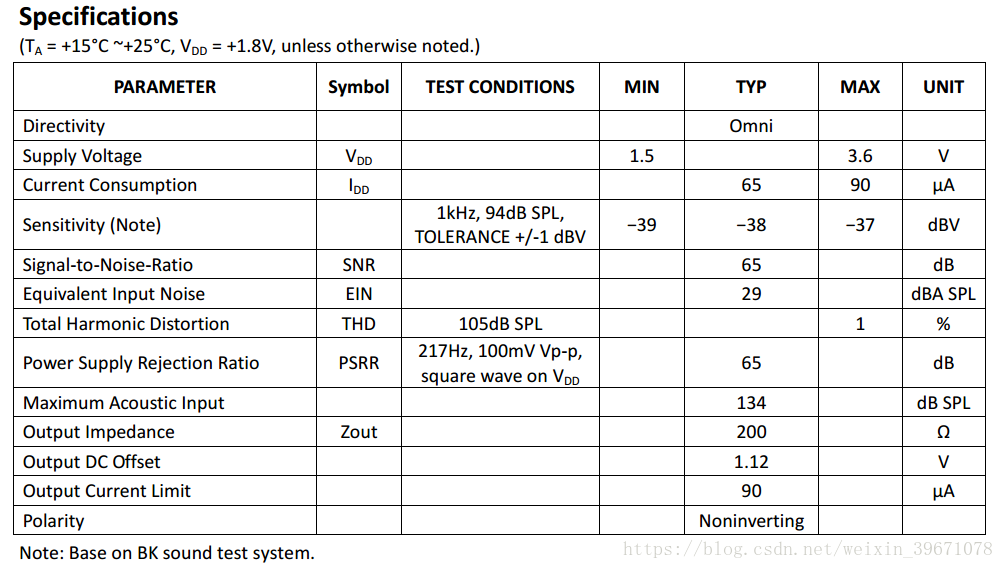
下圖爲某型號硅麥的效能參數