MPU6050卡爾曼濾波解算姿態角
前言
自己在課上吹的牛,課程作業再麻煩也得幹。模了好幾天魚,終於在DDL前一天弄完了慣導模組的簡單demo,卡爾曼濾波算是我弄的最久的了(大概2-3天),雖然沒有徹底弄懂原理(概率論沒學,隱馬爾可夫鏈啥的更是不會),好歹就着教學推導給實現了。
實現的效果不咋的,還是存在明顯的跳動,估計是MPU6050陀螺儀的事,方差大、數值基本是不準 不準的,爬了。
理論推導
假定條件
使用陀螺儀和加速度計實現卡爾曼濾波有幾個基本假設,我碼字的時候忘了幾個,先列出來,以後想起來再填。
- 線性系統。對於穩態卡爾曼濾波,應該是線性時不變系統?
- 靜態條件,也就是隻有重力加速度G的情況下,才能 纔能使用加速度推導出歐拉角。
歐拉角和四元數
這個部分其實只用瞭解一下歐拉角即可,但是作爲一個開發備忘,繞任意軸旋轉的矩陣、四元數還是要有的,萬一以後用到了呢(狗頭)。
歐拉角
我們這裏說的歐拉角是Z-Y-X歐拉角,也就是先繞Z軸旋轉α角,再繞Y軸旋轉β角,最後繞X軸旋轉γ角。示意圖大概是這麼個樣子。一般Z軸取鉛垂軸,X軸爲物體主對稱軸,Y軸爲輔對稱軸或用右手定則確定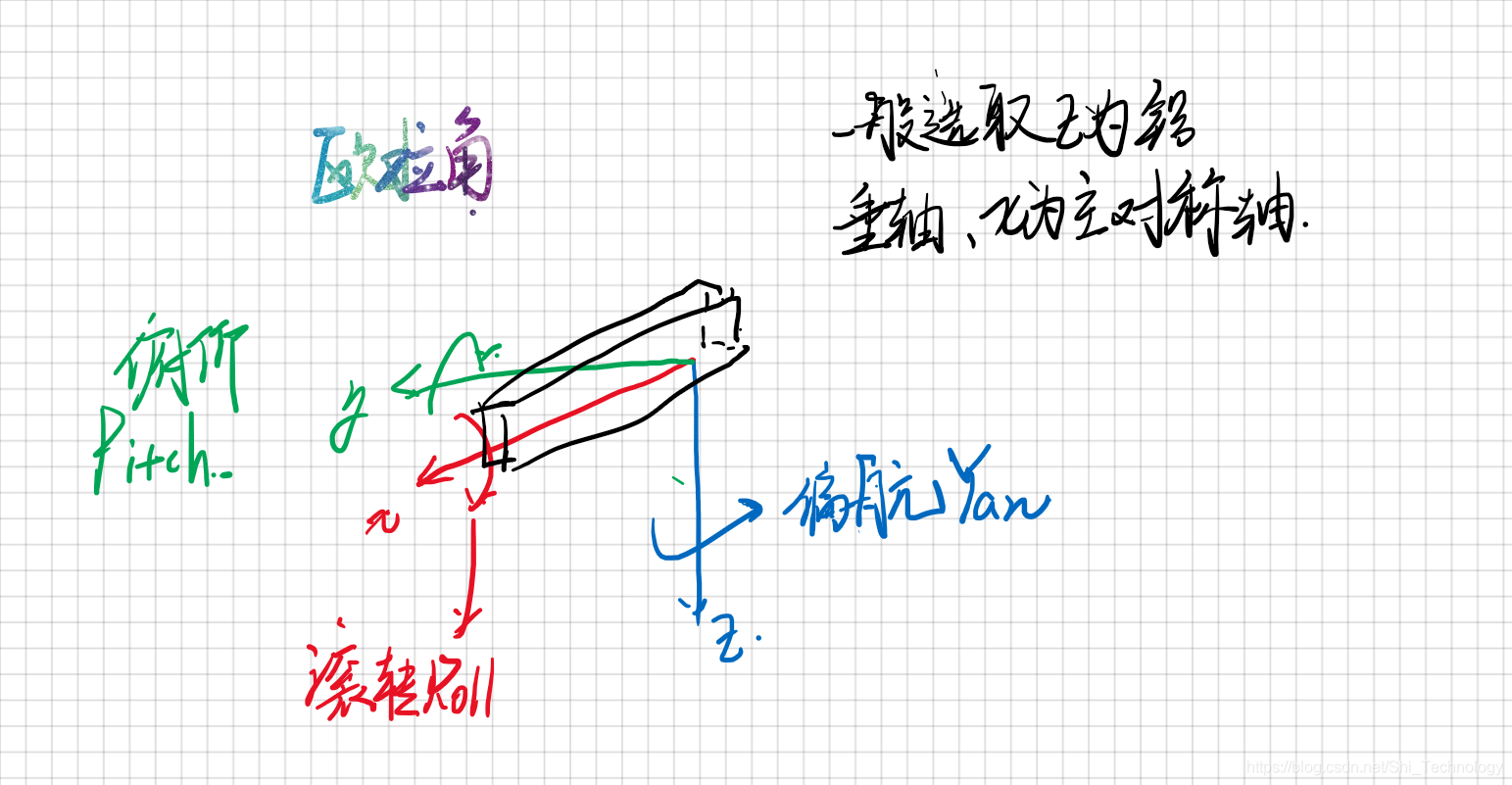
那麼我們就將繞Z軸旋轉的角度Yaw稱爲偏航,繞X軸旋轉的角度稱爲Roll滾轉,繞Y軸旋轉的角度Pitch稱爲俯仰角。
繞任意軸旋轉的矩陣(Goldman公式)
歐拉角實際上是一種轉角排列設定法,轉角的排列順序比較多,但是很多旋轉實際上是一樣的。我們可以找到一個等效的旋轉軸和對應這個軸的轉角,那麼我們假定
那麼我們可以將被旋轉向量V分解爲沿軸分量V_c和V_1,利用向量叉積取垂直V_c和V_1的V_2。設旋轉後的向量爲V’,其在平面分量爲V’_1,有:
示意圖(意思意思就行了(狗頭))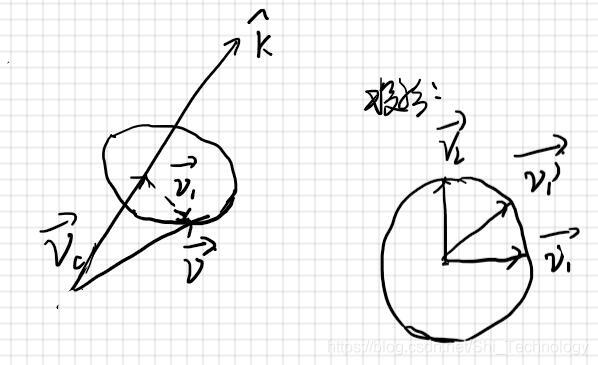
下面 下麪就是用V_1和V_2表示旋轉後的向量投影,假設轉角爲θ,θ實際上就是V’_1和V_1的夾角(圖上忘畫了),那麼旋轉後的向量就是:
帶入軸K的單位向量表示和各個座標軸的座標即可得到Goldman公式。例如:
如果令V=(1,0,0),即X軸,那麼代入旋轉後向量公式就可以求得矩陣的第一列。
最後的旋轉矩陣應該是:
其中c爲cosθ,s爲sinθ。
四元數/歐拉參數
基於上面的繞任意軸旋轉的公式,我們可以使用4個數值表示旋轉,這四個數值稱爲歐拉參數,可以視爲一個單位四元數:
這四個參數滿足:
推導
說是推導,實際上就是說明幾個符號的意義和演算法的邏輯,真要看推導還得看參考文獻1和3。
在這裏,我們使用大寫字母(比如X)表示矩陣,使用小寫+斜體表示一個列向量,例如:
注意上面兩個例子的下標和上標,\hat表示該值/向量爲預測得到的,而k-1|k-1表示k-1時刻該值/向量爲經過k-1時刻卡爾曼濾波計算後得到,k|k-1則表明這是利用k-1時刻對k時刻進行的預測(沒有經過卡爾曼濾波)。
首先建立系統的狀態空間方程(應該是這麼說?)
式中:
基於(1)(2)式,我就開始推導(列公式)了。首先是預測過程,如果不考慮噪聲,我們的預測是:
然後是對於協方差矩陣P進行預測,協方差矩陣P的定義是:
對(1)和(3)做差,然後由於Q和預測無關,我們就可以得到對P的預測值:
對於MPU6050,我們設定觀測變數爲:
顯然,這兩個是不相乾的,因此協方差矩陣Q爲一個對角陣,輸入變數U爲:
那麼矩陣F、B、Q爲,dt爲採樣時間,Q_{θ}爲角度的協方差:
關於協方差矩陣P,其初始化值其實不需要非常關心。因爲如果是線性時不變系統,在經過一段時間後P會迭代到一個穩態的值,初值只是會改變這個迭代的速度。如果初始值是精確的,那麼完全可以初始爲一個0陣;對於我們這樣設定的狀態變數,因爲其相互獨立,所以P也是個對角陣,P可以初始化爲,爲一個比較大的值:
下面 下麪是觀測:
根據(2)式,我們先來討論一下向量和矩陣。
爲了便於在C語言中實現,我們這裏用的是二維的單獨解算,如果我們設定觀測向量爲單純某個角度(比如滾轉角Roll),那麼就不需要求矩陣的逆(具體原因後面說),大大簡化運算。
因此,觀測向量爲一個角度標量,這個角度通過加速度算出;同樣,觀測噪聲矩陣R也爲一個標量。
關於R的值,R越大,證明我們對觀測結果越不信任,會使得響應變慢;如果過小,那麼噪聲影響就會比較大。
觀測我們先需要通過加速度獲取觀測值,這裏用參考博文2 的atan2那個方法進行計算,具體可以看那篇博文。
然後計算預計和觀測的誤差,顯然這個誤差是個標量(scalar):
然後爲了方便計算,我們將一箇中間變數定義爲矩陣S,在參考博文1中作者稱其爲innovation covariance,我也不知道是啥。
在我們這個情況下,這個矩陣S是一個標量,因此後面對其求逆時只需要做除法(填坑)。
下面 下麪進行演算法的下一步:計算卡爾曼增益:
有了這一步的卡爾曼增益,我們就可以對預測和觀測進行Fusion了:
最後一步就是實現協方差矩陣P的更新:
卡爾曼濾波調參:
調參這個問題,我不是很明白,只能大概說一下,可能沒啥用,反正這篇博文是爲以後開發做備忘。
參數有:協方差矩陣P的初始值,狀態向量x的初始值,過程噪聲矩陣Q,測量噪聲矩陣R
對於狀態向量x的初始值,其實也不是一個參數,因爲初始情況一般已知。如果說具體實現,那就保持靜止採幾百個樣,求均值基本就行。
對於P的初值,其實沒太有影響,P的初始值只是影響卡爾曼濾波的收斂速度,如果對初始觀測十分確定,取0陣就行。
比較難確定的就是過程噪聲矩陣Q和測量噪聲矩陣R,這裏的參數我是抄第一篇博文的,具體怎樣通過實驗測定我也不是很清楚。
卡爾曼濾波實質:
對於一維的情況來說,卡爾曼濾波實際上是兩個正太分佈的乘積\疊加,我們通過kalman得到的估計值實際上就是這個疊加的新期望值,具體的可以看參考文章3.
C實現
這個網上很多,博主趕着打遊戲,有空再填(狗頭)。
Python實現
import numpy as np
import matplotlib.pyplot as plt
import math
#compute the sigma of accel and gryo's measurement
dataset = np.loadtxt(r'C:\Users\Lin\Desktop\ProjectFisher\navigation\ckalman.csv',delimiter=',')
sigma = np.std(dataset,axis = 0)
print(sigma)
print(dataset.mean(axis = 0))
gryo_x = dataset[:,0]
accel_z = dataset[:,5]
accel_y = dataset[:,4]
accel_x = dataset[:,3]
RollC = dataset[:,6]
K1C = dataset[:,7]
K2C = dataset[:,8]
n = accel_x.shape[0]
#kalman compute
'''
對於MPU6050進行卡爾曼濾波的前提條件:
1. 線性時不變系統
2. 鉛墜方向加速度爲一定值,如果不是,那麼應該用磁強計進行角度觀測
3. 以後再補充
'''
TimeList = [i/2 for i in range(0,n,1)]#時間序列
GAngle = 0
GAngleList = []#預測得到的角度
AAngleList = []#觀測值得到的角度
KAngleList = []#Kalman濾波後的角度
KalmanList = []#Kalman 增益值1
KalmanList2 = []#Kalman 增益值2
BiasList = []
angle = 0#初始角度爲0
bias = 0 #初始的角速度偏差爲0
#參量:dt採樣時間,P初始協方差矩陣(與收斂有關),Q過程噪聲矩陣(越大預測可信度越低),測量噪聲矩陣R(R越大觀測可信度越低)
dt = 0.5
X = np.array([[angle],[bias]]) #預測變數
Gryo = 0 #輸入控制變量
Z = 0 #觀測量,爲加速度計算出的角度.實際上,加速度計算出的角度,只能說鉛錘軸的加速度g不變推導出的
Y =0#觀測量與預計值的誤差,Y = Z-HX
P = np.array([[1,0],[0,1]]) #初始化協方差矩陣P,P是一個對角陣,[L,0;0,L]L是一個很大的數;如果已知初始狀態,那麼認爲置信度100%,即爲0陣
Q = np.array([[0.001,0],[0,0.17]])#過程噪聲矩陣,角度的協方差來自TKJ,角速度爲測量得到的方差,實際上真正的過程噪聲矩陣還應該xdt
R = 0.01 #測量噪聲矩陣,由於是二維且只有角度,因此轉換爲標量,使用加速度的方差
F = np.array([[1,-dt],[0,1]])
B = np.array([[dt],[0]])#輸入作用於預測的矩陣B
H= np.array([[1,0],])#狀態轉移矩陣,將預測空間的變數對映到觀測空間,這裏的觀測是角度(使用加速度分量計算而得出)
K = np.array([[0],[0]])#卡爾曼增益
I =np.array([[1,0],[0,1]])#單位矩陣
for i in range(0,n,1):
Gryo = gryo_x[i]
#計算預測得到的結果
GAngle += Gryo*dt
GAngleList.append(GAngle)
X =np.dot(F,X)+np.dot(B,Gryo) # 根據k-1時刻計算k時刻預測值
P = np.dot(np.dot(F,P),F.T)+Q*dt #根據k-1時刻估計的協方差矩陣
Roll = math.degrees(math.atan2(accel_y[i],accel_z[i]))
#Roll角還可以通過atan(accY/sqrt(accX^2+accZ^2))計算,網上的歐拉角計算有兩種方式,
#參考https://blog.csdn.net/qcopter/article/details/51848544
Z = Roll
AAngleList.append(Z)#計算單純觀測得到的結果
Y =Z - np.dot(H,X)
S = np.dot(np.dot(H,P),H.T)+R #中間變數,S理論上應該是矩陣,在最後計算卡爾曼增益時需要取inv(S),但是這裏S是scalar,因此求逆只需要做除法
K = np.dot(P,H.T)/S#計算卡爾曼增益
X = X+K*Y #卡爾曼濾波後的預測值
P = np.dot(I-np.dot(K,H),P)
KAngleList.append(X[0][0])
KalmanList.append(K[0][0])
KalmanList2.append(K[1][0])
BiasList.append(X[1][0])
KAngleList = np.array(KAngleList)
KalmanList = np.array(KalmanList)
GAngleList = np.array(GAngleList)
AAngleList = np.array(AAngleList)
BiasList = np.array(BiasList)
plt.figure("kalmanfilter")
plt.subplot(231)
plt.plot(TimeList,KAngleList,'r--')
plt.plot(TimeList,RollC,'c')
plt.subplot(232)
plt.plot(TimeList,GAngleList,'g')
plt.subplot(233)
plt.plot(TimeList,AAngleList,'b')
plt.subplot(234)
plt.plot(TimeList,gryo_x,'y')
plt.subplot(235)
plt.plot(TimeList,BiasList,'y--')
plt.subplot(236)
plt.plot(TimeList,KalmanList, 'r--')
plt.plot(TimeList,K1C, 'c')
plt.plot(TimeList,KalmanList2, 'g--')
plt.plot(TimeList,K2C, 'k')
plt.show()
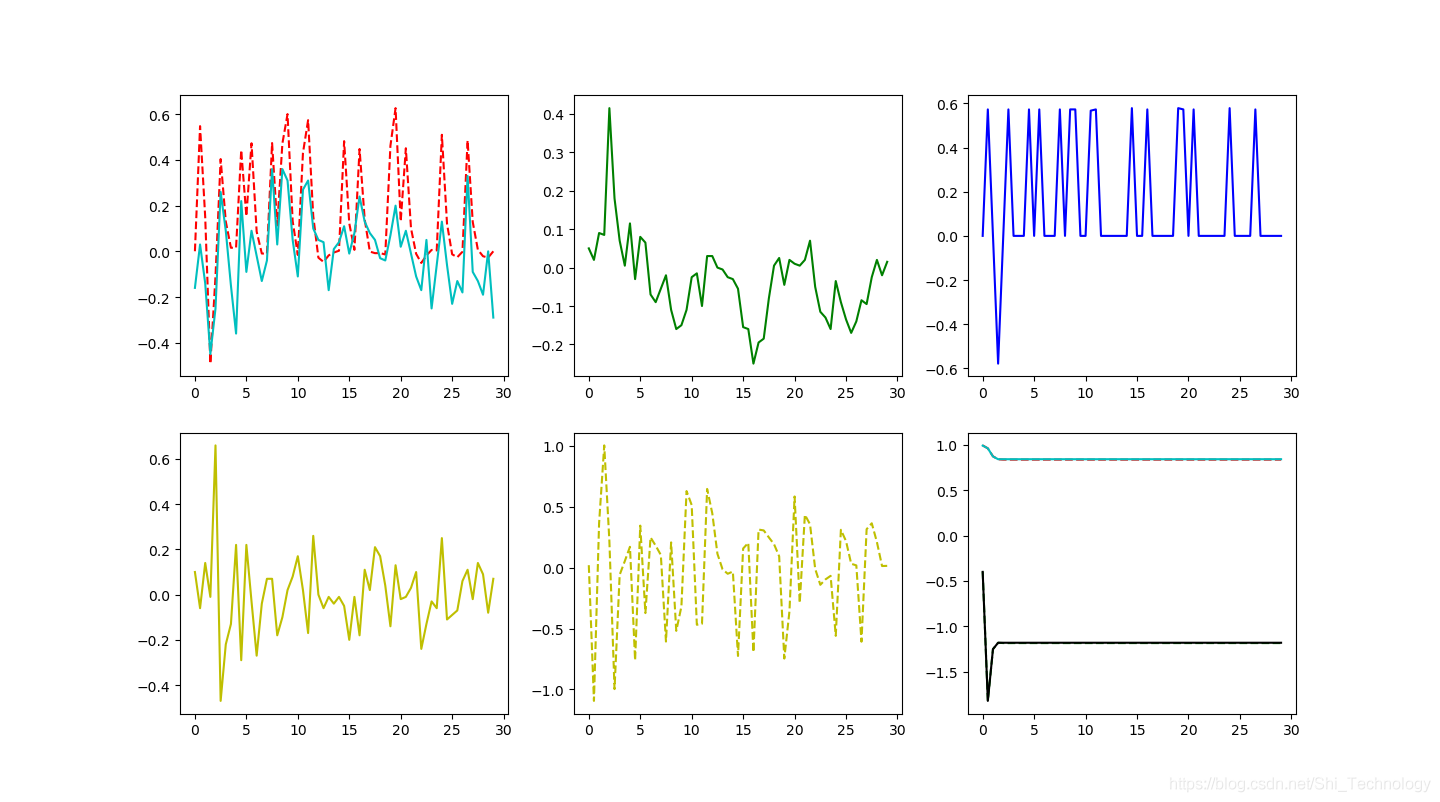
與C實現的結果進行對比:
第一張虛線是Python實現的卡爾曼濾波結果,天藍色是C語言實現版本結果;第二張是單純使用陀螺儀積分結果,第三張是單獨使用加速度解算結果;第四張是角速度;第六章實線是C語言計算出的卡爾曼增益,虛線是Python計算出的。兩者曲線基本重合,所以應該是沒問題的,但是爲什麼第一張濾波結果不同,估計是計算精度的問題。
Reference
- 卡爾曼濾波演算法的推導以及C實現(這篇博文強烈推薦,說的特別詳細):a-practical-approach-to-kalman-filter-and-how-to-implement-it
- 關於姿態角的加速度求解:靜態條件下三軸加速度求角度的演算法
- 卡爾曼濾波演算法的參數理解與推導?:卡爾曼濾波演算法的參數理解
- Goldman公式的推導:Goldman公式的推導
- 機器人學導論[J.Craig]