2023年奔走的總結---吉特日化MES 智慧搬運AGV 篇三
《2023年奔走的總結---吉特日化MES 專案趣事 篇一》
《2023年奔走的總結---吉特日化MES 製藥專案 篇二》
《2023年奔走的總結---吉特日化MES 智慧搬運AGV 篇三》
上篇文章寫到了今年關於製藥醫療器械相關的專案,本篇文章將重點總結一下今年遇到的AGV專案,今年經過幾個AGV專案對車間搬運有了更深的理解。幾年前AGV在電商物流行業裡面顯得非常耀眼,是不是來一個電商倉庫幾十臺,上百臺AGV的排程,場面甚是壯觀,但是之前這種專案機會也是可遇不可求,得有足夠的資金投入,還有很多廠商的AGV技術還不夠成熟也是非常多的問題。最近一些年隨著智慧製造的概念普及,AGV在生產車間的使用也是越來越多了,車間智慧搬運也不是有錢的大企業專屬了。
七、某咖啡配送倉
接觸到這個專案也是偶然機會,是朋友介紹說我這邊有AGV專案經驗,然後他們想找一個會AGV,同時懂倉庫以及排程的人幫忙做這個專案,最關鍵是想找個低價的,朋友讓我去試試於是就自己親自下場了。
專案要求:對立庫流水分揀線進行改造,將分揀之後的產品實現自動化搬運取代人工
專案硬體方: 某堆垛機立庫,某RGV軌道搬運小車,某二維條碼AGV小車,某自動化工業提升機,某自動化流水分揀線
軟體方:某廠家大WMS系統,某廠家小WMS系統,AGV小車排程系統(RCS系統),我方 WCS系統(整合AGV小車,RGV小車,自動輸送線,工業提升機,自動疊盤機)
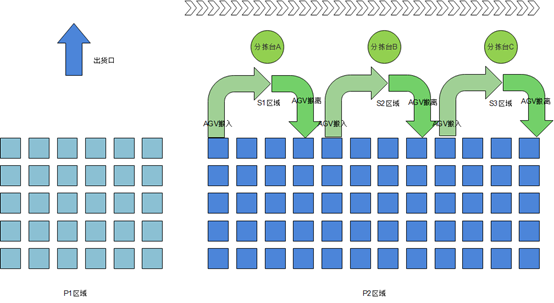
流程描述:
(1) 將倉庫整體繼續功能區劃分:分揀口,分揀口快取區,空託區,滿拖區,發貨區,疊盤區(硬體改造受限,此部分自動化搬運未實現)
(2) 立庫堆垛機接收到發貨訂單之後,堆垛機取托盤通過RGV小車將托盤運輸到分揀口
(3) RGV 小車進入到分揀口,通過光電感測器感應托盤到達分揀口
(4) 人工分揀托盤上的產品,將托盤上分揀出來的箱通過分揀輸送線輸送到下游,然後人工將分揀之後的箱重新放到空托盤上,最後進行發貨
(5) 分揀之後的托盤通過自動提升機或工業電梯發到裝車口進行發貨
(6) 發貨之後的釋放的托盤,通過疊盤機將空托盤疊加到一起,然後進入到立庫中儲存。
改造要求:
(1) 拆卸掉所有的人工分揀輸送線,將倉庫空間利用率增大。人工分揀的過程暫時不變(分期改造,後期可能採用機械手進行分揀替代人工)
(2) 人工分揀之後的托盤進入臨時區或者滿拖區,之前採用人工叉車方式改造為使用AGV自動實現搬運
(3) 人工分揀之前需要使用空托盤,之前是採用人工叉車或者人力搬運的方式獲取,需要通過進入到分揀口的托盤產品自動呼叫AGV搬運空托盤或者未滿托盤
(4) 上層系統下發發貨指令之後,人工使用叉車將滿托盤搬運到發貨口或者直接搬運到提升機,改造之後得到指令AGV自動搬運對應的托盤到發貨口或提升機
(5) 分揀要求:一個托盤貨可以對應一個或多個客戶訂單,一個客戶訂單可能有多品類分佈在不同的托盤中,一個訂單可能需要一個或多個托盤分揀,分揀托盤未滿的情況需要重複使用 【托盤:是指立庫中儲存產品的托盤,分揀托盤:是指倉庫中產品分揀之後的發貨托盤】
(6) 分揀口自動讀取立庫托盤,將指令傳送給分揀系統
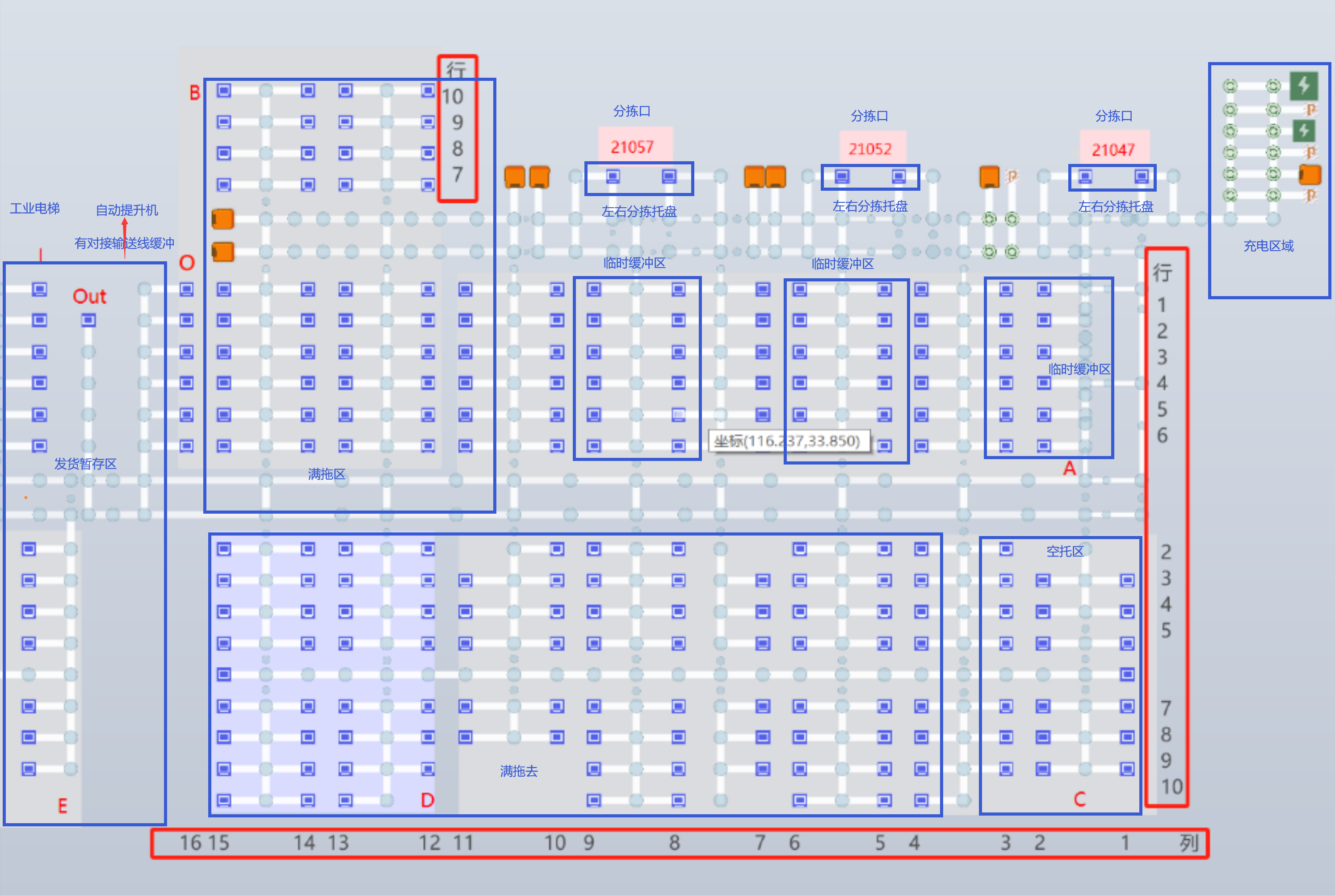
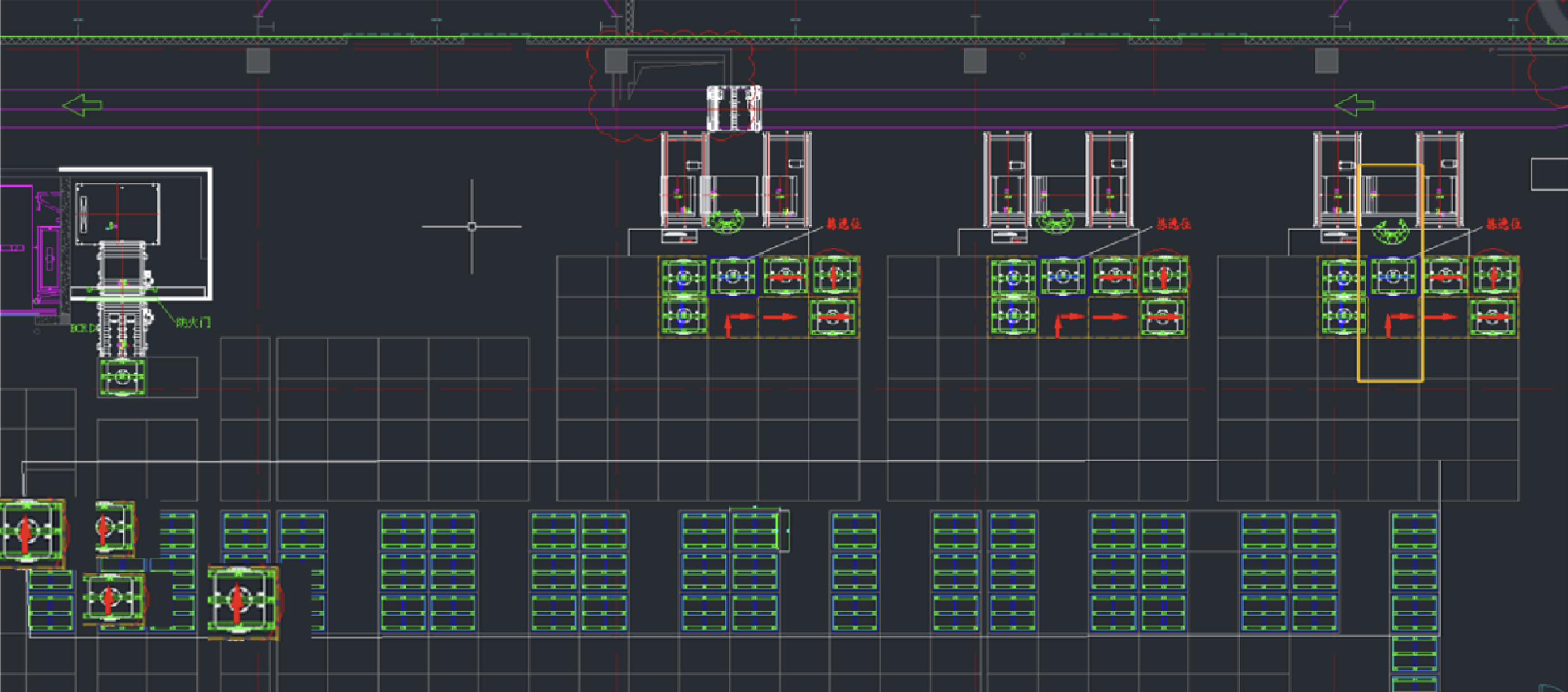
路線定義:
路線一:空託區--左右分揀托盤(臨時緩衝區--左右分揀托盤) 光電感測器感應到立庫出來的托盤之後,根據托盤上的產品判斷有哪些訂單需要該產品,同時分揀系統分配一個空托盤或者一個該訂單未滿的托盤到左右分揀托盤位。
路線二:人工分揀完成之後(將立庫托盤上的貨物分揀到左右分揀托盤位上的托盤),將托盤搬運到臨時緩衝區或滿拖區
路線三: 波次分揀指令完成之後,將臨時緩衝區托盤搬運到滿拖區或搬運到發貨暫存區
路線四: 接收到發貨指令將 滿拖區托盤搬運到發貨暫存區
路線五: 自動發貨將發貨暫存區托盤搬運到自動提升機對接的輥筒輸送線上
路線六: 發貨完成之後,空託放置於發貨暫存區,通過PDA掃描確認發貨完成,AGV自動空托盤搬運到空託儲存區

AGV專案的總結經驗:
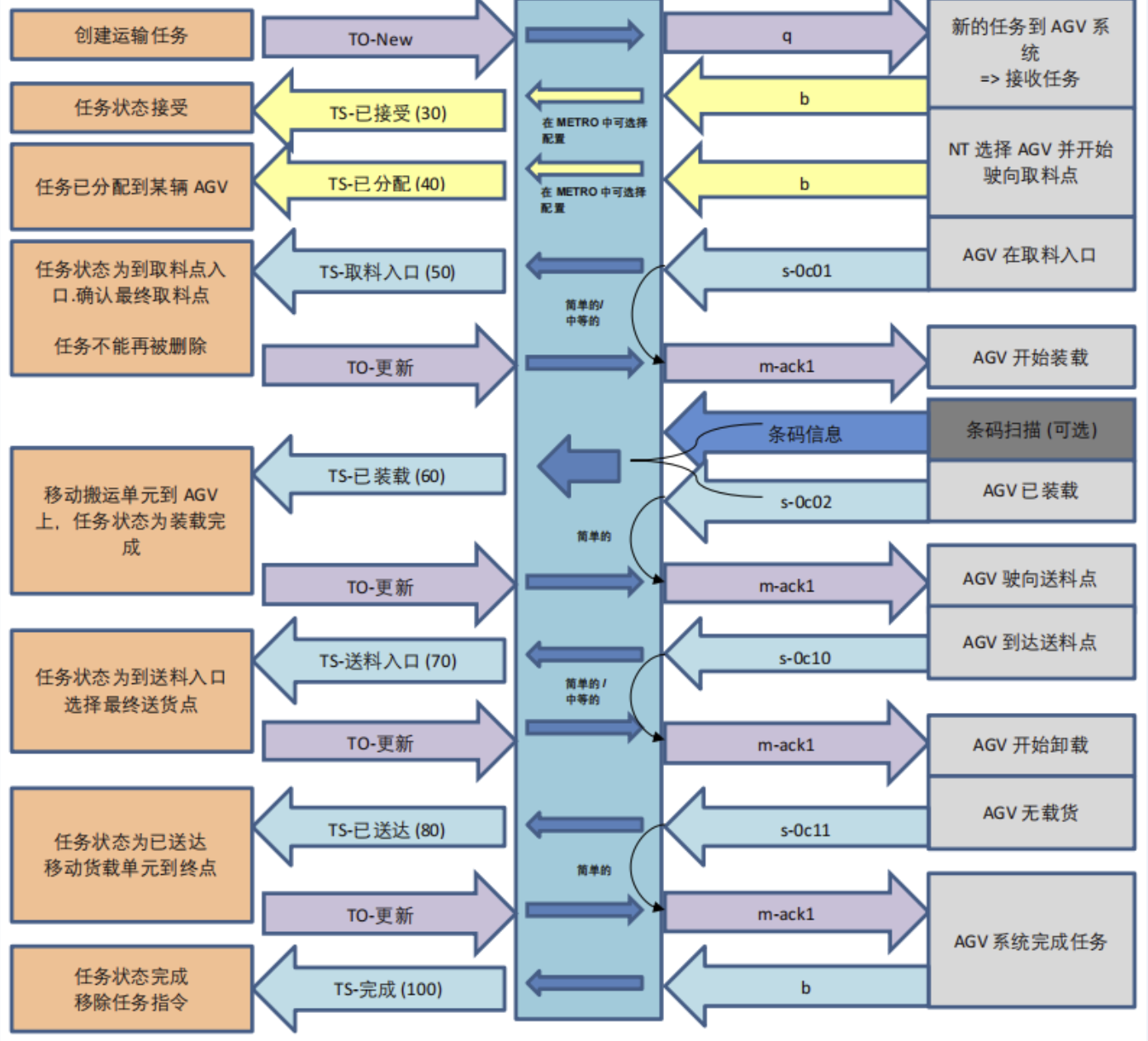
(1) AGV 系統和其他上位系統整合其實是非常簡單的,生成一個對等的搬運基本沒有難度
(2) 自動化倉庫的WMS與傳統的掃描作業倉庫有一個很大的區別,就是要管理:載具的中間狀態,庫位的鎖定狀態 (AGV小車或其他搬運裝置執行過程中的狀態)
(3) 要想實現各種物流搬運裝置之間的整合,需要有統一的排程系統(WCS)協同,用於連線 堆垛機,穿梭車,輸送線,機械手,AGV,提升機 等等,特別是涉及到不同品牌的裝置
(4) AGV專案最難的部分在於排程系統,特別是對搬運效率的優化,而且搬運效率除了何時下發搬運指令到AGV同時還要AGV的位置,排隊等問題
(5) AGV 專案中如果涉及到任務排程排隊的問題,特別是涉及到多深度搬運料箱或者其他載具的時候,多車路徑衝突問題解決,比如先後A,B兩車去同一個巷道去搬運托盤,結果B車先到目標巷道,這個時候可能會擁堵的情況
(6) 當人流和物流混合作業的時候,簡單的靠AGV的排程系統管控庫位已經無法實現,人工作業必須要和RCS系統的之間的庫位,載具資料保持同步
(7) AGV搬運任務,大部分情況會涉及到跨中間過程障礙物的情況(比如停止等待其他任務,比如與輸送線互動,或者過提升機,電梯等),那這種情況建議將一個複雜的搬運過程分級為多個對等的搬運任務
(8) AGV 搬運過程中的例外處理是必須關注到的,如果AGV一切順暢執行還好,如果發生搬運異常(裝置故障,堵塞,任務錯亂等),那麼恢復到正常狀態是一個比較難的過程,所以必須要考慮異常情況
(9) 為了提高搬運的效率,可以設定緩衝區,可以設定單車固定任務或者固定區域執行,儘可能減少同一輛車幹不同種型別的搬運(比如儘量不要車跨樓層,既收貨又發貨等)
(10) 下發任務的時間點,與裝置PLC通訊的時間頻率控制是非常值得研究的問題
八、其他搬運專案
今天經歷了好幾個AGV相關的專案,總體來說AGV的專案都比較簡單,車間中的AGV專案比電商倉庫的AGV專案還是相對簡單許多。一般製造型企業AGV的數量都少於電商倉庫的AGV數量,不會出現較為複雜的排程。
(1) 常規的AGV專案要實現車體的運動都非常簡單,一般來說就是呼叫廠商的API介面即可
(2) 要想AGV車穩定持續的執行,這個需要不斷的優化路徑和排程程式
(3) AGV常規對接裝置包含:輸送線接駁口(堆垛機,穿梭車等一般都會有延伸的緩衝接駁口),機械手,提升機/電梯
(4) AGV也分好多種:潛伏式,叉車式,料箱式,而AGV的選型一定要根據使用場景來選擇
(5) 做AGV等自動化搬運專案,首先就要考慮載具的標準化,如果不能將載具標準化後續的問題也非常多
(6) 一般AGV上來之後達到的執行效率都沒有廠家宣傳的那麼好,一般廠家宣傳的都是理想環境和空載情況
(7) 要想AGV顯得智慧,那就必須在排程系統上下功夫
(8) 在製造業中生產車間中使用AGV,一定要考慮環境因素,比如視覺的要考慮光照,二維條碼是否可以地面貼碼,地面平整度,是否要穿物理空間跨障礙物,是否和其他裝置有互動,人流和物流是否衝突,人工是否參與到搬運
(9) 單純的靠AGV本身的排程系統是無法實現車間物料搬運高效提升的,必須有上層的系統關聯(生產業務流觸發式的指令下發)
(10) 與其他的裝置的整合,就是訊號的互動過程,遵循一個基本的互動流程。互動涉及到的協定 S7,OPC,Modbus 等
彙總了一部分車間物流相關的要素點,可以參考
作者:情緣
出處:http://www.cnblogs.com/qingyuan/
關於作者:從事倉庫,生產軟體方面的開發,在專案管理以及企業經營方面尋求發展之路
版權宣告:本文版權歸作者和部落格園共有,歡迎轉載,但未經作者同意必須保留此段宣告,且在文章頁面明顯位置給出原文連結。
聯絡方式: 個人QQ 821865130 ; 倉儲技術QQ群 88718955,142050808 ; 15800466429 同微信
吉特倉儲管理系統 開源地址: https://github.com/hechenqingyuan/gitwms
吉特日化MES 演示地址: http://mes.gitwms.com/
標籤: 吉特倉儲管理系統(開源WMS),吉特日化生產執行製造系統(日化MES),稱量防差錯系統,投料防差錯系統