【驅動】串列埠驅動分析(二)-tty core
前言
tty這個名稱源於電傳打位元組的簡稱,在linux表示各種終端,終端通常都跟硬體相對應。比如對應於輸入裝置鍵盤滑鼠,輸出裝置顯示器的控制終端和串列埠終端。也有對應於不存在裝置的pty驅動。在如此眾多的終端模型之中,linux是怎麼將它們統一建模的呢?這就是我們今天要討論的問題。
tty驅動概貌
tty架構如下所示:
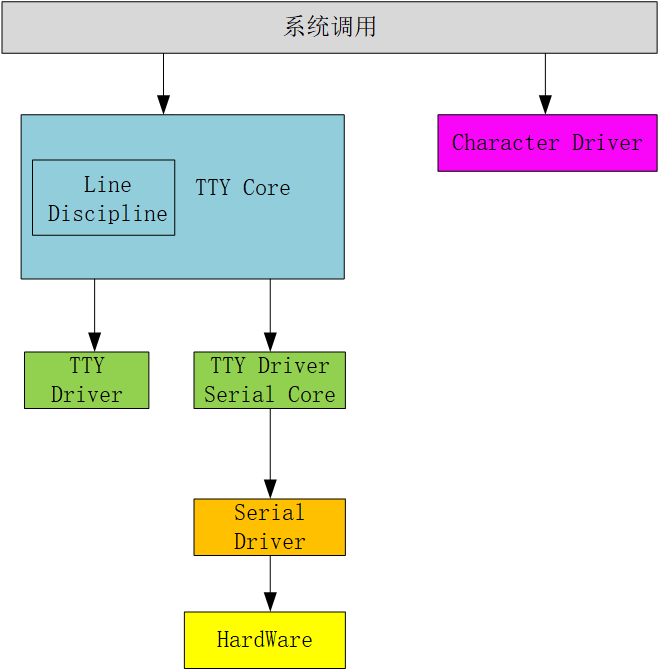
如上圖所示,使用者空間主要是通過系統呼叫與tty core互動。tty core根據用空間操作的型別再選擇跟line discipline和tty driver互動。
例如,設定硬體的ioctl指令就直接交給tty_driver處理。read和write操作就會交給 line discipline處理。
Line discipline是線路規程的意思。正如它的名字一樣,它表示的是這條終端」執行緒」的輸入與輸出規範設定。主要用來進行輸入/輸出資料的預處理。
處理之後,就會將資料交給tty driver ,它將字元轉換成終端可以理解的字串。將其傳給終端裝置。
值得注意的是,這個架構沒有為tty driver 提供read操作。也就是說tty core 和line discipline都沒有辦法從tty driver裡直接讀終端資訊。這是因為tty driver對應的hardware並不一定是輸入資料和輸出 資料的共同負載者。
例如控制終端,輸出裝置是顯示器,輸入裝置是鍵盤。基於這樣的原理。在line discipline中有一個輸入快取區,並提供了一個名叫receive_buf()的介面函數。對應的終端裝置只要呼叫line discipine的receiver_buf函數,將資料寫入到輸入快取區就可以了。如果一個裝置同時是輸入裝置又是輸出裝置。那在裝置的中斷處理中呼叫receive_buf()將資料寫入即可.
tty驅動介面分析
tty_init()
/*
* Ok, now we can initialize the rest of the tty devices and can count
* on memory allocations, interrupts etc..
*/
int __init tty_init(void)
{
tty_sysctl_init();
cdev_init(&tty_cdev, &tty_fops);
if (cdev_add(&tty_cdev, MKDEV(TTYAUX_MAJOR, 0), 1) ||
register_chrdev_region(MKDEV(TTYAUX_MAJOR, 0), 1, "/dev/tty") < 0)
panic("Couldn't register /dev/tty driver\n");
device_create(tty_class, NULL, MKDEV(TTYAUX_MAJOR, 0), NULL, "tty");
cdev_init(&console_cdev, &console_fops);
if (cdev_add(&console_cdev, MKDEV(TTYAUX_MAJOR, 1), 1) ||
register_chrdev_region(MKDEV(TTYAUX_MAJOR, 1), 1, "/dev/console") < 0)
panic("Couldn't register /dev/console driver\n");
consdev = device_create_with_groups(tty_class, NULL,
MKDEV(TTYAUX_MAJOR, 1), NULL,
cons_dev_groups, "console");
if (IS_ERR(consdev))
consdev = NULL;
#ifdef CONFIG_VT
vty_init(&console_fops);
#endif
return 0;
}
tty_init主要做了以下工作:
- 初始化 tty 子系統的 sysctl 相關設定,包括註冊 sysctl 引數、建立 sysctl 目錄等。
- 初始化 tty 裝置的字元裝置物件,並將其與 tty 裝置操作函數
tty_fops繫結。同時,建立一個名為 "tty" 的 tty 裝置節點,並將其裝置號設定為MKDEV(TTYAUX_MAJOR, 0)。 - 初始化控制檯裝置的字元裝置物件,並將其新增到字元裝置系統中。同時,建立一個名為 "console" 的控制檯裝置節點,並將其裝置號設定為
MKDEV(TTYAUX_MAJOR, 1)。該控制檯裝置節點還將在 sysfs 中建立一個名為 "console" 的目錄,並在該目錄下建立多個屬性檔案,用於控制控制檯的一些屬性。 - 如果核心支援虛擬終端,則初始化虛擬終端。
這裡我們看到了熟悉的
cdev_init(),device_create()之類的函數,這正是字元裝置的建立流程。因此,我們說串列埠驅動也是一個字元裝置驅動。而在
serial8250_init()中,會呼叫platform_driver_register()去註冊serial8250_isa_driver,在裝置樹節點和serial8250_isa_drivername匹配的時候,就會進入probe流程。因此,也可以說串列埠驅動是匯流排裝置驅動模型。
tty_alloc_driver
/* Use TTY_DRIVER_* flags below */
#define tty_alloc_driver(lines, flags) \
__tty_alloc_driver(lines, THIS_MODULE, flags)
__tty_alloc_driver()用於分配一個 tty 驅動程式的資料結構 struct tty_driver,並對其一些常用欄位進行初始化。
/**
* __tty_alloc_driver -- allocate tty driver
* @lines: count of lines this driver can handle at most
* @owner: module which is repsonsible for this driver
* @flags: some of TTY_DRIVER_* flags, will be set in driver->flags
*
* This should not be called directly, some of the provided macros should be
* used instead. Use IS_ERR and friends on @retval.
*/
struct tty_driver *__tty_alloc_driver(unsigned int lines, struct module *owner,
unsigned long flags)
{
struct tty_driver *driver;
unsigned int cdevs = 1;
int err;
if (!lines || (flags & TTY_DRIVER_UNNUMBERED_NODE && lines > 1))
return ERR_PTR(-EINVAL);
/*分配一個 struct tty_driver 結構體,並對其中的一些欄位進行初始化,包括 num、owner、flags 等*/
driver = kzalloc(sizeof(struct tty_driver), GFP_KERNEL);
if (!driver)
return ERR_PTR(-ENOMEM);
kref_init(&driver->kref);
driver->magic = TTY_DRIVER_MAGIC;
driver->num = lines;
driver->owner = owner;
driver->flags = flags;
/*如果 TTY_DRIVER_DEVPTS_MEM 標誌位沒有被設定,那麼函數會分配 driver->ttys 和 driver->termios,否則不需要分配*/
if (!(flags & TTY_DRIVER_DEVPTS_MEM)) {
driver->ttys = kcalloc(lines, sizeof(*driver->ttys),
GFP_KERNEL);
driver->termios = kcalloc(lines, sizeof(*driver->termios),
GFP_KERNEL);
if (!driver->ttys || !driver->termios) {
err = -ENOMEM;
goto err_free_all;
}
}
/*如果 TTY_DRIVER_DYNAMIC_ALLOC 標誌位沒有被設定,那麼函數會分配 driver->ports,否則不需要分配*/
if (!(flags & TTY_DRIVER_DYNAMIC_ALLOC)) {
driver->ports = kcalloc(lines, sizeof(*driver->ports),
GFP_KERNEL);
if (!driver->ports) {
err = -ENOMEM;
goto err_free_all;
}
cdevs = lines;
}
/*函數會根據 lines 的值分配相應數量的 driver->cdevs*/
driver->cdevs = kcalloc(cdevs, sizeof(*driver->cdevs), GFP_KERNEL);
if (!driver->cdevs) {
err = -ENOMEM;
goto err_free_all;
}
return driver;
err_free_all:
kfree(driver->ports);
kfree(driver->ttys);
kfree(driver->termios);
kfree(driver->cdevs);
kfree(driver);
return ERR_PTR(err);
}
tty_register_driver
tty_register_driver用於註冊 tty 驅動程式的,被 tty 驅動程式呼叫以將自己註冊到核心中。
/*
* Called by a tty driver to register itself.
*/
int tty_register_driver(struct tty_driver *driver)
{
int error;
int i;
dev_t dev;
struct device *d;
/*確認是否要核心動態分配主裝置號*/
if (!driver->major) {
/*函數呼叫 alloc_chrdev_region 函數來動態分配主裝置號,並將分配的主裝置號和次裝置號儲存在 driver->major 和 driver->minor_start 欄位中*/
error = alloc_chrdev_region(&dev, driver->minor_start,
driver->num, driver->name);
if (!error) {
driver->major = MAJOR(dev);
driver->minor_start = MINOR(dev);
}
} else {
/*已經預先分配了主裝置號,函數呼叫 register_chrdev_region 函數來註冊裝置號*/
dev = MKDEV(driver->major, driver->minor_start);
error = register_chrdev_region(dev, driver->num, driver->name);
}
if (error < 0)
goto err;
/*判斷是否設定了 TTY_DRIVER_DYNAMIC_ALLOC 標誌位*/
if (driver->flags & TTY_DRIVER_DYNAMIC_ALLOC) {
/*需要動態分配 tty 裝置號,函數呼叫 tty_cdev_add 函數來新增 tty 裝置號,並將每個 tty 裝置的字元裝置註冊到核心中*/
error = tty_cdev_add(driver, dev, 0, driver->num);
if (error)
goto err_unreg_char;
}
mutex_lock(&tty_mutex);
/*將 driver 新增到連結串列 tty_drivers 中*/
list_add(&driver->tty_drivers, &tty_drivers);
mutex_unlock(&tty_mutex);
/*判斷 TTY_DRIVER_DYNAMIC_DEV 標誌位是否設定*/
if (!(driver->flags & TTY_DRIVER_DYNAMIC_DEV)) {
for (i = 0; i < driver->num; i++) {
/*需要註冊固定的 tty 裝置號,函數在迴圈中呼叫 tty_register_device 函數來註冊每個 tty 裝置號,並將每個 tty 裝置註冊到核心中*/
d = tty_register_device(driver, i, NULL);
if (IS_ERR(d)) {
error = PTR_ERR(d);
goto err_unreg_devs;
}
}
}
/*註冊 /proc/tty/drivers 目錄中的資訊*/
proc_tty_register_driver(driver);
/*將 driver 結構體中的 flags 欄位設定為 TTY_DRIVER_INSTALLED,表示該驅動程式已經被成功註冊到核心中*/
driver->flags |= TTY_DRIVER_INSTALLED;
return 0;
err_unreg_devs:
for (i--; i >= 0; i--)
tty_unregister_device(driver, i);
mutex_lock(&tty_mutex);
list_del(&driver->tty_drivers);
mutex_unlock(&tty_mutex);
err_unreg_char:
unregister_chrdev_region(dev, driver->num);
err:
return error;
}
tty_register_driver()函數操作比較簡單。就是為tty_driver建立字元裝置。然後將字元裝置的操作集指定為tty_fops。並且將tty_driver 掛載到tty_drivers連結串列中。這個連結串列中是以裝置號為關鍵字找到對應的driver。
特別的。如果沒有定義TTY_DRIVER_DYNAMIC_DEV。還會在sysfs中建立一個類裝置。這樣主要是為了udev管理裝置。
tty_unregister_device
tty_unregister_device用於登出一個 tty 裝置。該函數的作用是銷燬裝置節點和字元裝置,以便於釋放與該 tty 裝置相關的資源,例如記憶體和裝置檔案等.
/**
* tty_unregister_device - unregister a tty device
* @driver: the tty driver that describes the tty device
* @index: the index in the tty driver for this tty device
*
* If a tty device is registered with a call to tty_register_device() then
* this function must be called when the tty device is gone.
*
* Locking: ??
*/
void tty_unregister_device(struct tty_driver *driver, unsigned index)
{
device_destroy(tty_class,
MKDEV(driver->major, driver->minor_start) + index);
if (!(driver->flags & TTY_DRIVER_DYNAMIC_ALLOC)) {
cdev_del(driver->cdevs[index]);
driver->cdevs[index] = NULL;
}
}
tty_unregister_device所做工作如下:
- 呼叫
device_destroy函數來銷燬 tty 裝置對應的裝置節點。接受兩個引數:第一個引數tty_class表示 tty 類,第二個引數是 tty 裝置的裝置號,其中MKDEV(driver->major, driver->minor_start) + index表示 tty 裝置的裝置號,driver->major表示 tty 裝置的主裝置號,driver->minor_start表示 tty 裝置的次裝置號的起始值,index表示 tty 裝置的索引 - 如果該 tty 驅動程式不是動態分配的,則呼叫
cdev_del函數來登出該 tty 裝置對應的字元裝置。
get_tty_driver
get_tty_driver作用是在使用者空間的應用程式使用 tty 裝置時,獲取對應的 tty 驅動程式的資訊。
/**
* get_tty_driver - find device of a tty
* @dev_t: device identifier
* @index: returns the index of the tty
*
* This routine returns a tty driver structure, given a device number
* and also passes back the index number.
*
* Locking: caller must hold tty_mutex
*/
static struct tty_driver *get_tty_driver(dev_t device, int *index)
{
struct tty_driver *p;
/**/
list_for_each_entry(p, &tty_drivers, tty_drivers) {
dev_t base = MKDEV(p->major, p->minor_start);
if (device < base || device >= base + p->num)
continue;
*index = device - base;
return tty_driver_kref_get(p);
}
return NULL;
}
首先使用 list_for_each_entry 迴圈遍歷全域性連結串列 tty_drivers,該連結串列中儲存了所有已經註冊的 tty 驅動程式。對於每個 tty 驅動程式,函數將其裝置號的起始值和結束值計算出來,如果給定裝置號不在這個範圍內,則繼續遍歷下一個 tty 驅動程式。
如果給定裝置號在某個 tty 驅動程式的範圍內,則計算出該裝置號對應的 tty 裝置的索引值,並呼叫 tty_driver_kref_get 函數來獲取該 tty 驅動程式的參照計數。函數返回該 tty 驅動程式的結構體指標,並將找到的 tty 裝置的索引值儲存到 index 引數中。
需要注意的是,函數在存取全域性連結串列 tty_drivers 時,需要持有互斥鎖 tty_mutex。因為多個應用程式可能同時存取同一個 tty 驅動程式,如果沒有互斥鎖保護,可能會導致並行問題。
tty_open
從註冊的過程可以看到,所有的操作都會對應到tty_fops中。Open操作對應的操作介面是tty_open(),用於開啟一個 tty 裝置。函數的作用是在使用者空間的應用程式使用 tty 裝置時,開啟對應的 tty 裝置,並初始化相應的資料結構。
/**
* tty_open - open a tty device
* @inode: inode of device file
* @filp: file pointer to tty
*
* tty_open and tty_release keep up the tty count that contains the
* number of opens done on a tty. We cannot use the inode-count, as
* different inodes might point to the same tty.
*
* Open-counting is needed for pty masters, as well as for keeping
* track of serial lines: DTR is dropped when the last close happens.
* (This is not done solely through tty->count, now. - Ted 1/27/92)
*
* The termios state of a pty is reset on first open so that
* settings don't persist across reuse.
*
* Locking: tty_mutex protects tty, tty_lookup_driver and tty_init_dev.
* tty->count should protect the rest.
* ->siglock protects ->signal/->sighand
*
* Note: the tty_unlock/lock cases without a ref are only safe due to
* tty_mutex
*/
static int tty_open(struct inode *inode, struct file *filp)
{
struct tty_struct *tty;
int noctty, retval;
struct tty_driver *driver = NULL;
int index;
dev_t device = inode->i_rdev;
unsigned saved_flags = filp->f_flags;
nonseekable_open(inode, filp);
retry_open:
/*分配一個 tty 結構體*/
retval = tty_alloc_file(filp);
if (retval)
return -ENOMEM;
/*檢查檔案的標誌位,如果包含 O_NOCTTY 標誌,則禁止將該 tty 裝置設定為控制終端*/
noctty = filp->f_flags & O_NOCTTY;
index = -1;
retval = 0;
/*嘗試開啟當前的 tty 裝置*/
tty = tty_open_current_tty(device, filp);
if (!tty) {
mutex_lock(&tty_mutex);
/*根據裝置號來查詢對應的 tty 驅動程式,並初始化該 tty 裝置,將找到的 tty 驅動程式儲存到 driver 變數中*/
driver = tty_lookup_driver(device, filp, &noctty, &index);
if (IS_ERR(driver)) {
retval = PTR_ERR(driver);
goto err_unlock;
}
/* check whether we're reopening an existing tty */
/*查詢對應的 tty 裝置,並將找到的 tty 裝置結構體指標儲存到 tty 變數中*/
tty = tty_driver_lookup_tty(driver, inode, index);
if (IS_ERR(tty)) {
retval = PTR_ERR(tty);
goto err_unlock;
}
if (tty) {
/*如果找到了該 tty 裝置,則需要重新開啟該 tty 裝置*/
mutex_unlock(&tty_mutex);
retval = tty_lock_interruptible(tty);
tty_kref_put(tty); /* drop kref from tty_driver_lookup_tty() */
if (retval) {
if (retval == -EINTR)
retval = -ERESTARTSYS;
goto err_unref;
}
retval = tty_reopen(tty);
if (retval < 0) {
tty_unlock(tty);
tty = ERR_PTR(retval);
}
} else { /* Returns with the tty_lock held for now */
/*需要初始化該 tty 裝置*/
tty = tty_init_dev(driver, index);
/*為該 tty 裝置分配一個 tty 結構體,並對其進行初始化*/
mutex_unlock(&tty_mutex);
}
tty_driver_kref_put(driver);
}
if (IS_ERR(tty)) {
retval = PTR_ERR(tty);
if (retval != -EAGAIN || signal_pending(current))
goto err_file;
tty_free_file(filp);
schedule();
goto retry_open;
}
/*將該 tty 裝置與檔案結構體相關聯*/
tty_add_file(tty, filp);
check_tty_count(tty, __func__);
/*如果該 tty 裝置是一個偽終端主裝置,則需要將 noctty 標誌設定為 1*/
if (tty->driver->type == TTY_DRIVER_TYPE_PTY &&
tty->driver->subtype == PTY_TYPE_MASTER)
noctty = 1;
tty_debug_hangup(tty, "(tty count=%d)\n", tty->count);
/*呼叫 tty 裝置的 open 函數*/
if (tty->ops->open)
retval = tty->ops->open(tty, filp);
else
retval = -ENODEV;
filp->f_flags = saved_flags;
if (retval) {
tty_debug_hangup(tty, "error %d, releasing...\n", retval);
tty_unlock(tty); /* need to call tty_release without BTM */
tty_release(inode, filp);
if (retval != -ERESTARTSYS)
return retval;
if (signal_pending(current))
return retval;
schedule();
/*
* Need to reset f_op in case a hangup happened.
*/
if (tty_hung_up_p(filp))
filp->f_op = &tty_fops;
goto retry_open;
}
clear_bit(TTY_HUPPED, &tty->flags);
read_lock(&tasklist_lock);
spin_lock_irq(¤t->sighand->siglock);
if (!noctty &&
current->signal->leader &&
!current->signal->tty &&
tty->session == NULL) {
/*
* Don't let a process that only has write access to the tty
* obtain the privileges associated with having a tty as
* controlling terminal (being able to reopen it with full
* access through /dev/tty, being able to perform pushback).
* Many distributions set the group of all ttys to "tty" and
* grant write-only access to all terminals for setgid tty
* binaries, which should not imply full privileges on all ttys.
*
* This could theoretically break old code that performs open()
* on a write-only file descriptor. In that case, it might be
* necessary to also permit this if
* inode_permission(inode, MAY_READ) == 0.
*/
if (filp->f_mode & FMODE_READ)
__proc_set_tty(tty);
}
spin_unlock_irq(¤t->sighand->siglock);
read_unlock(&tasklist_lock);
tty_unlock(tty);
return 0;
err_unlock:
mutex_unlock(&tty_mutex);
err_unref:
/* after locks to avoid deadlock */
if (!IS_ERR_OR_NULL(driver))
tty_driver_kref_put(driver);
err_file:
tty_free_file(filp);
return retval;
}
函數所作工作如下:
-
在開啟 tty 裝置時,該函數會檢查檔案的標誌位,如果包含
O_NOCTTY標誌,則禁止將該 tty 裝置設定為控制終端。這是因為如果一個程序開啟一個 tty 裝置並將其設定為控制終端,其他程序就無法再將該 tty 裝置設定為控制終端,這可能會導致一些問題。 -
如果開啟當前的 tty 裝置失敗,則需要根據裝置號來查詢對應的 tty 驅動程式,並初始化該 tty 裝置。在查詢 tty 驅動程式時,需要呼叫
tty_lookup_driver函數來查詢對應的 tty 驅動程式,並將找到的 tty 驅動程式儲存到driver變數中。如果找不到對應的 tty 驅動程式,則返回錯誤碼。 -
如果找到了對應的 tty 驅動程式,則呼叫
tty_driver_lookup_tty函數來查詢對應的 tty 裝置,並將找到的 tty 裝置結構體指標儲存到tty變數中。如果找到了該 tty 裝置,則需要重新開啟該 tty 裝置。否則,需要初始化該 tty 裝置。在初始化 tty 裝置時,需要呼叫tty_init_dev函數來為該 tty 裝置分配一個 tty 結構體,並對其進行初始化。 -
在開啟 tty 裝置之後,函數會呼叫
tty_add_file函數將該 tty 裝置與檔案結構體相關聯。此外,如果該 tty 裝置是一個偽終端主裝置,則需要將noctty標誌設定為 1。 -
最後,函數會呼叫 tty 裝置的
open函數,如果存在的話,來進行一些特定的操作。如果open函數返回錯誤碼,則需要釋放該 tty 裝置並返回錯誤碼。如果open函數返回-ERESTARTSYS,則需要重新開啟該 tty 裝置。如果有中斷髮生,也需要重新開啟該 tty 裝置。
tty_write
tty_write()作用是將使用者資料寫入 tty 裝置,並通過線路規則(line discipline)進行處理。
線路規則是 tty 裝置的一種機制,用於處理和轉換從使用者程序到核心和裝置的資料流。在寫入 tty 裝置之前,需要獲取該 tty 裝置的線路規則,並呼叫其 write 方法進行處理。
/**
* tty_write - write method for tty device file
* @file: tty file pointer
* @buf: user data to write
* @count: bytes to write
* @ppos: unused
*
* Write data to a tty device via the line discipline.
*
* Locking:
* Locks the line discipline as required
* Writes to the tty driver are serialized by the atomic_write_lock
* and are then processed in chunks to the device. The line discipline
* write method will not be invoked in parallel for each device.
*/
static ssize_t tty_write(struct file *file, const char __user *buf,
size_t count, loff_t *ppos)
{
struct tty_struct *tty = file_tty(file);
struct tty_ldisc *ld;
ssize_t ret;
if (tty_paranoia_check(tty, file_inode(file), "tty_write"))
return -EIO;
if (!tty || !tty->ops->write ||
(test_bit(TTY_IO_ERROR, &tty->flags)))
return -EIO;
/* Short term debug to catch buggy drivers */
if (tty->ops->write_room == NULL)
printk(KERN_ERR "tty driver %s lacks a write_room method.\n",
tty->driver->name);
ld = tty_ldisc_ref_wait(tty);
if (!ld->ops->write)
ret = -EIO;
else
ret = do_tty_write(ld->ops->write, tty, file, buf, count);
tty_ldisc_deref(ld);
return ret;
}
tty_write()所作工作如下:
- 首先從檔案指標中獲取
tty_struct資料結構的指標,表示要寫入的 tty 裝置。 - 檢查傳入的
tty_struct指標是否有效,以及是否有其他程序正在存取該 tty 裝置。如果出現問題,返回輸入/輸出錯誤碼-EIO。 - 檢查
tty_struct指標是否有效、tty 裝置是否支援寫操作,以及是否已經出現了輸入/輸出錯誤。如果出現問題,返回輸入/輸出錯誤碼-EIO。 - 檢查 tty 裝置是否實現了
write_room方法,如果沒有,則輸出錯誤資訊。 - 獲取 tty 裝置的線路規則(line discipline),並等待獲取成功。
- 檢查線路規則的
write方法是否存在,如果不存在,返回輸入/輸出錯誤碼-EIO。否則,呼叫do_tty_write函數,將資料寫入 tty 裝置。 - 釋放線路規則參照計數器。
- 返回寫入操作的結果,如果寫入成功,則返回寫入的位元組數;否則,返回相應的錯誤碼。
tty_read
/**
* tty_read - read method for tty device files
* @file: pointer to tty file
* @buf: user buffer
* @count: size of user buffer
* @ppos: unused
*
* Perform the read system call function on this terminal device. Checks
* for hung up devices before calling the line discipline method.
*
* Locking:
* Locks the line discipline internally while needed. Multiple
* read calls may be outstanding in parallel.
*/
static ssize_t tty_read(struct file *file, char __user *buf, size_t count,
loff_t *ppos)
{
int i;
struct inode *inode = file_inode(file);
struct tty_struct *tty = file_tty(file);
struct tty_ldisc *ld;
if (tty_paranoia_check(tty, inode, "tty_read"))
return -EIO;
if (!tty || (test_bit(TTY_IO_ERROR, &tty->flags)))
return -EIO;
/* We want to wait for the line discipline to sort out in this
situation */
ld = tty_ldisc_ref_wait(tty);
if (ld->ops->read)
i = ld->ops->read(tty, file, buf, count);
else
i = -EIO;
tty_ldisc_deref(ld);
if (i > 0)
tty_update_time(&inode->i_atime);
return i;
}
tty_read()實現終端裝置檔案讀操作的函數 。
- 獲取
tty_struct結構體、inode和line discipline物件的指標。 - 呼叫
tty_paranoia_check()函數檢查tty_struct結構體是否可用。如果檢查失敗,返回 -EIO。 - 檢查
tty_struct結構體是否為空或者TTY_IO_ERROR標誌位已經設定。如果是,則返回 -EIO。 - 獲取
line discipline物件的參照,確保它不會在tty_read()函數執行期間被解除安裝。 - 檢查
line discipline的read()方法是否可用。如果可用,則呼叫該方法進行讀取操作,並將返回的位元組數儲存在變數 i 中。如果不可用,返回 -EIO。 - 釋放
line discipline的參照。 - 如果讀取操作成功,呼叫
tty_update_time()函數更新 inode 的存取時間。 - 返回讀取的位元組數。
小結
在這一節裡,只對tty的構造做一個分析,具體的比如線路規程的內容我們瞭解知道就好,這裡不做深入分析。
本文參考
https://blog.csdn.net/pan0755/article/details/51693178
https://blog.csdn.net/qq_43286311/article/details/117824804
https://www.jianshu.com/p/09e87a725ed4
https://blog.csdn.net/weixin_40407893/article/details/117956968