探索 Linux 核心:Kconfig/kbuild 的秘密
深入理解 Linux 設定/構建系統是如何工作的。
自從 Linux 核心程式碼遷移到 Git 以來,Linux 核心設定/構建系統(也稱為 Kconfig/kbuild)已存在很長時間了。然而,作為支援基礎設施,它很少成為人們關注的焦點;甚至在日常工作中使用它的核心開發人員也從未真正思考過它。
為了探索如何編譯 Linux 核心,本文將深入介紹 Kconfig/kbuild 內部的過程,解釋如何生成 .config 檔案和 vmlinux/bzImage 檔案,並介紹一個巧妙的依賴性跟蹤技巧。
Kconfig
構建核心的第一步始終是設定。Kconfig 有助於使 Linux 核心高度模組化和可客製化。Kconfig 為使用者提供了許多設定目標:
| 設定目標 | 解釋 |
|---|---|
config | 利用命令列程式更新當前設定 |
nconfig | 利用基於 ncurses 選單的程式更新當前設定 |
menuconfig | 利用基於選單的程式更新當前設定 |
xconfig | 利用基於 Qt 的前端程式更新當前設定 |
gconfig | 利用基於 GTK+ 的前端程式更新當前設定 |
oldconfig | 基於提供的 .config 更新當前設定 |
localmodconfig | 更新當前設定,禁用沒有載入的模組 |
localyesconfig | 更新當前設定,轉換本地模組到核心 |
defconfig | 帶有來自架構提供的 defconcig 預設值的新設定 |
savedefconfig | 儲存當前設定為 ./defconfig(最小設定) |
allnoconfig | 所有選項回答為 no 的新設定 |
allyesconfig | 所有選項回答為 yes 的新設定 |
allmodconfig | 盡可能選擇所有模組的新設定 |
alldefconfig | 所有符號(選項)設定為預設值的新設定 |
randconfig | 所有選項隨機選擇的新設定 |
listnewconfig | 列出新選項 |
olddefconfig | 同 oldconfig 一樣,但設定新符號(選項)為其預設值而無須提問 |
kvmconfig | 啟用支援 KVM 訪客核心模組的附加選項 |
xenconfig | 啟用支援 xen 的 dom0 和 訪客核心模組的附加選項 |
tinyconfig | 設定盡可能小的核心 |
我認為 menuconfig 是這些目標中最受歡迎的。這些目標由不同的主程式處理,這些程式由核心提供並在核心構建期間構建。一些目標有 GUI(為了方便使用者),而大多數沒有。與 Kconfig 相關的工具和原始碼主要位於核心原始碼中的 scripts/kconfig/ 下。從 scripts/kconfig/Makefile 中可以看到,這裡有幾個主程式,包括 conf、mconf 和 nconf。除了 conf 之外,每個都負責一個基於 GUI 的設定目標,因此,conf 處理大多數目標。
從邏輯上講,Kconfig 的基礎結構有兩部分:一部分實現一種新語言來定義設定項(參見核心原始碼下的 Kconfig 檔案),另一部分解析 Kconfig 語言並處理設定操作。
大多數設定目標具有大致相同的內部過程(如下所示):
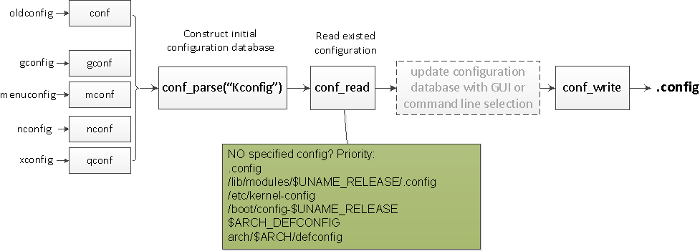
請注意,所有設定項都具有預設值。
第一步讀取原始碼根目錄下的 Kconfig 檔案,構建初始設定資料庫;然後它根據如下優先順序讀取現有組態檔來更新初始資料庫:
.config/lib/modules/$(shell,uname -r)/.config/etc/kernel-config/boot/config-$(shell,uname -r)ARCH_DEFCONFIGarch/$(ARCH)/defconfig
如果你通過 menuconfig 進行基於 GUI 的設定或通過 oldconfig 進行基於命令列的設定,則根據你的自定義更新資料庫。最後,該設定資料庫被轉儲到 .config 檔案中。
但 .config 檔案不是核心構建的最終素材;這就是 syncconfig 目標存在的原因。syncconfig曾經是一個名為 silentoldconfig 的設定目標,但它沒有做到其舊名稱所說的工作,所以它被重新命名。此外,因為它是供內部使用的(不適用於使用者),所以它已從上述列表中刪除。
以下是 syncconfig 的作用:
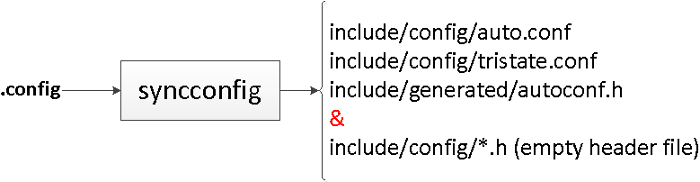
syncconfig 將 .config 作為輸入並輸出許多其他檔案,這些檔案分為三類:
auto.conf&tristate.conf用於 makefile 文字處理。例如,你可以在元件的 makefile 中看到這樣的語句:obj-$(CONFIG_GENERIC_CALIBRATE_DELAY) += calibrate.o。autoconf.h用於 C 語言的原始檔。include/config/下空的標頭檔案用於 kbuild 期間的設定依賴性跟蹤。下面會解釋。
設定完成後,我們將知道哪些檔案和程式碼片段未編譯。
kbuild
元件式構建,稱為遞回 make,是 GNU make 管理大型專案的常用方法。kbuild 是遞迴 make 的一個很好的例子。通過將原始檔劃分為不同的模組/元件,每個元件都由其自己的 makefile 管理。當你開始構建時,頂級 makefile 以正確的順序呼叫每個元件的 makefile、構建元件,並將它們收集到最終的執行程式中。
kbuild 指向到不同型別的 makefile:
Makefile位於原始碼根目錄的頂級 makefile。.config是核心組態檔。arch/$(ARCH)/Makefile是架構的 makefile,它用於補充頂級 makefile。scripts/Makefile.*描述所有的 kbuild makefile 的通用規則。- 最後,大約有 500 個 kbuild makefile。
頂級 makefile 會將架構 makefile 包含進去,讀取 .config 檔案,下到子目錄,在 scripts/ Makefile.* 中定義的例程的幫助下,在每個元件的 makefile 上呼叫 make,構建每個中間物件,並將所有的中間物件連結為 vmlinux。核心文件 Documentation/kbuild/makefiles.txt 描述了這些 makefile 的方方面面。
作為一個例子,讓我們看看如何在 x86-64 上生成 vmlinux:

(此插圖基於 Richard Y. Steven 的部落格。有過更新,並在作者允許的情況下使用。)
進入 vmlinux 的所有 .o 檔案首先進入它們自己的 built-in.a,它通過變數KBUILD_VMLINUX_INIT、KBUILD_VMLINUX_MAIN、KBUILD_VMLINUX_LIBS 表示,然後被收集到 vmlinux 檔案中。
在下面這個簡化的 makefile 程式碼的幫助下,了解如何在 Linux 核心中實現遞回 make:
# In top Makefilevmlinux: scripts/link-vmlinux.sh $(vmlinux-deps) +$(call if_changed,link-vmlinux)# Variable assignmentsvmlinux-deps := $(KBUILD_LDS) $(KBUILD_VMLINUX_INIT) $(KBUILD_VMLINUX_MAIN) $(KBUILD_VMLINUX_LIBS)export KBUILD_VMLINUX_INIT := $(head-y) $(init-y)export KBUILD_VMLINUX_MAIN := $(core-y) $(libs-y2) $(drivers-y) $(net-y) $(virt-y)export KBUILD_VMLINUX_LIBS := $(libs-y1)export KBUILD_LDS := arch/$(SRCARCH)/kernel/vmlinux.ldsinit-y := init/drivers-y := drivers/ sound/ firmware/net-y := net/libs-y := lib/core-y := usr/virt-y := virt/# Transform to corresponding built-in.ainit-y := $(patsubst %/, %/built-in.a, $(init-y))core-y := $(patsubst %/, %/built-in.a, $(core-y))drivers-y := $(patsubst %/, %/built-in.a, $(drivers-y))net-y := $(patsubst %/, %/built-in.a, $(net-y))libs-y1 := $(patsubst %/, %/lib.a, $(libs-y))libs-y2 := $(patsubst %/, %/built-in.a, $(filter-out %.a, $(libs-y)))virt-y := $(patsubst %/, %/built-in.a, $(virt-y))# Setup the dependency. vmlinux-deps are all intermediate objects, vmlinux-dirs# are phony targets, so every time comes to this rule, the recipe of vmlinux-dirs# will be executed. Refer "4.6 Phony Targets" of `info make`$(sort $(vmlinux-deps)): $(vmlinux-dirs) ;# Variable vmlinux-dirs is the directory part of each built-in.avmlinux-dirs := $(patsubst %/,%,$(filter %/, $(init-y) $(init-m) \ $(core-y) $(core-m) $(drivers-y) $(drivers-m) \ $(net-y) $(net-m) $(libs-y) $(libs-m) $(virt-y)))# The entry of recursive make$(vmlinux-dirs): $(Q)$(MAKE) $(build)=$@ need-builtin=1遞回 make 的配方被擴充套件開是這樣的:
make -f scripts/Makefile.build obj=init need-builtin=1這意味著 make 將進入 scripts/Makefile.build 以繼續構建每個 built-in.a。在scripts/link-vmlinux.sh 的幫助下,vmlinux 檔案最終位於源根目錄下。
vmlinux 與 bzImage 對比
許多 Linux 核心開發人員可能不清楚 vmlinux 和 bzImage 之間的關係。例如,這是他們在 x86-64 中的關係:
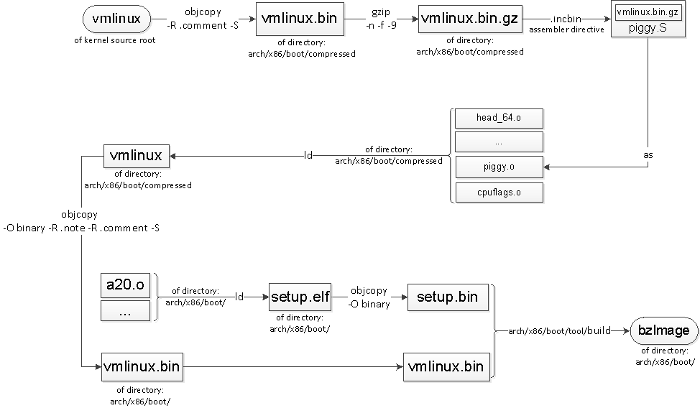
原始碼根目錄下的 vmlinux 被剝離、壓縮後,放入 piggy.S,然後與其他對等物件連結到 arch/x86/boot/compressed/vmlinux。同時,在 arch/x86/boot 下生成一個名為 setup.bin 的檔案。可能有一個可選的第三個檔案,它帶有重定位資訊,具體取決於 CONFIG_X86_NEED_RELOCS 的設定。
由核心提供的稱為 build 的宿主程式將這兩個(或三個)部分構建到最終的 bzImage 檔案中。
依賴跟蹤
kbuild 跟蹤三種依賴關係:
- 所有必備檔案(
*.c和*.h) - 所有必備檔案中使用的
CONFIG_選項 - 用於編譯該目標的命令列依賴項
第一個很容易理解,但第二個和第三個呢? 核心開發人員經常會看到如下程式碼:
#ifdef CONFIG_SMP__boot_cpu_id = cpu;#endif當 CONFIG_SMP 改變時,這段程式碼應該重新編譯。編譯原始檔的命令列也很重要,因為不同的命令列可能會導致不同的目標檔案。
當 .c 檔案通過 #include 指令使用標頭檔案時,你需要編寫如下規則:
main.o: defs.h recipe...管理大型專案時,需要大量的這些規則;把它們全部寫下來會很乏味無聊。幸運的是,大多數現代 C 編譯器都可以通過檢視原始檔中的 #include 行來為你編寫這些規則。對於 GNU 編譯器集合(GCC),只需新增一個命令列引數:-MD depfile
# In scripts/Makefile.libc_flags = -Wp,-MD,$(depfile) $(NOSTDINC_FLAGS) $(LINUXINCLUDE) \ -include $(srctree)/include/linux/compiler_types.h \ $(__c_flags) $(modkern_cflags) \ $(basename_flags) $(modname_flags)這將生成一個 .d 檔案,內容如下:
init_task.o: init/init_task.c include/linux/kconfig.h \ include/generated/autoconf.h include/linux/init_task.h \ include/linux/rcupdate.h include/linux/types.h \ ...然後主程式 fixdep 通過將 depfile 檔案和命令列作為輸入來處理其他兩個依賴項,然後以 makefile 格式輸出一個 .<target>.cmd 檔案,它記錄命令列和目標的所有先決條件(包括設定)。 它看起來像這樣:
# The command line used to compile the targetcmd_init/init_task.o := gcc -Wp,-MD,init/.init_task.o.d -nostdinc ......# The dependency filesdeps_init/init_task.o := \ $(wildcard include/config/posix/timers.h) \ $(wildcard include/config/arch/task/struct/on/stack.h) \ $(wildcard include/config/thread/info/in/task.h) \ ... include/uapi/linux/types.h \ arch/x86/include/uapi/asm/types.h \ include/uapi/asm-generic/types.h \ ...在遞回 make 中,.<target>.cmd 檔案將被包含,以提供所有依賴關係資訊並幫助決定是否重建目標。
這背後的秘密是 fixdep 將解析 depfile(.d 檔案),然後解析裡面的所有依賴檔案,搜尋所有 CONFIG_ 字串的文字,將它們轉換為相應的空的標頭檔案,並將它們新增到目標的先決條件。每次設定更改時,相應的空的標頭檔案也將更新,因此 kbuild 可以檢測到該更改並重建依賴於它的目標。因為還記錄了命令列,所以很容易比較最後和當前的編譯引數。
展望未來
Kconfig/kbuild 在很長一段時間內沒有什麼變化,直到新的維護者 Masahiro Yamada 於 2017 年初加入,現在 kbuild 正在再次積極開發中。如果你不久後看到與本文中的內容不同的內容,請不要感到驚訝。