強化學習-學習筆記6 | 蒙特卡洛演演算法
Monte Carlo Algorithms. 蒙特卡洛演演算法是一大類隨機演演算法,又稱為隨機抽樣或統計試驗方法,通過隨機樣本估計真實值。
下面用幾個範例來理解蒙特卡洛演演算法。
6. 蒙特卡洛演演算法
6.1 計算 \(\pi\)
a. 原理
如果我們不知道 \(\pi\) 的值,我們能不能用亂數 來近似 \(\pi\) 呢?
假設我們用一個亂數生成器,每次生成兩個範圍在 \([-1,+1]\) 的亂數,一個作為 x,另一個作為 y,即生成了一個二維隨機點:
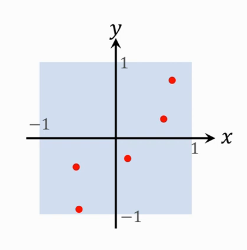
假如生成 1億 個隨機樣本,會有多少落在 半徑=1 的圓內?這個概率就是圓的面積除以正方形的面積。
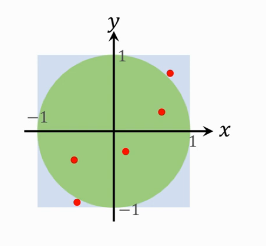
即:\(P = \frac{\pi{r^2}}{2^2}=\frac{\pi}{4}\)
假設從正方形區域中隨機抽樣 n 個點,那麼落在圓內點個數的期望為:\(P_n=\frac{\pi{n}}{4}\),
下面我們去求落在圓內的點的個數,只需滿足\(x^2+y^2\leqslant1\) 即為圓內。
如果生成的隨機點的個數足夠多,落在圓內的實際觀測值 \(m\approx \frac{\pi{n}}{4}\);
我們已知了m 與 n,所以\(\pi \approx \frac{4m}{n}\).
事實上,根據概率論大數定律:
\(\frac{4m}{n}\rightarrow \pi\),as n → ∞
這保證了蒙特卡洛的正確性。
伯恩斯坦概率不等式還能確定 觀測值和真實值之間誤差的上界。
\(|\frac{4m}{n}-\pi|=O(\frac{1}{\sqrt{n}})\)
說明 這個誤差與樣本n的根號成反比。
b. 程式碼
下面放一個Python程式碼
#coding=utf-8
#蒙特卡羅方法計算 pi
import random,math,time
start_time = time.perf_counter()
s = 1000*1000
hits = 0
for i in range(s):
x = random.random()
y = random.random()
z = math.sqrt(x**2+y**2)
if z<=1:
hits +=1
PI = 4*(hits/s)
print(PI)
end_time = time.perf_counter()
print("{:.2f}S".format(end_time-start_time))
# 輸出
3.141212
0.89S
另外可還有一個視覺化程式,可以模擬點落在方塊區域圓內外:http://www.anders.wang/monte-carlo/
6.2 Buffon's Needle Problem
a. 原理
布封投針,也是用蒙特卡洛來近似 \(\pi\) 值。這是一個可以動手做的實驗。
用一張紙,畫若干等距平行線(距離為 d),撒上一把等長的針(長度為l),通過與平行線相交的針的數量,就可以推算出 \(\pi\)。
通過微積分可以算出:相交的概率為:\(P = \frac{2l}{\pi{d}}\)
微積分推導過程:
課程裡並沒有講解推導,這裡我參考的是一下兩篇部落格的推導過程:
- https://zhuanlan.zhihu.com/p/479953215
- https://cosx.org/2009/11/a-brief-talk-on-buffon-throwing-needle-problems/
主流做法是通過對針的斜率進行積分:
這裡我後續補充。
跟 6.1 類似,我們隨機扔 n 根針,這樣相交個數的期望為 \(Pn = \frac{2ln}{\pi{d}}\) 。我們可以觀察到(如果是電腦模擬即為通過公式判斷出)有 m 跟針實際與線相交,如果n足夠大,則 \(m\approx \frac{2ln}{\pi{d}}\)。
求 \(\pi\) 公式即為: \(\pi\approx \frac{2ln}{md}\)
b. 程式碼
有了公式 \(\pi\approx \frac{2ln}{md}\),程式碼實現其實很簡單了,僅列出一種實現思路:
import numpy as np
def buffon(a,l,n):
xl = np.pi*np.random.random(n)
yl = 0.5*a*np.random.random(n)
m = 0
for x,y in zip(xl,yl):
if y < 0.5*l*np.sin(x):
m+=1
result = 2*l/a*n/m
print(f'pi的估計值是{result}')
buffon(2,1,1000000)
# 輸出為:
pi的估計值是3.153977165205324
當然,也有視覺化的程式碼:
import matplotlib.pyplot as plt
import random
import math
import numpy as np
NUMBER_OF_NEEDLES = 5000
class DefineNeedle:
def __init__(self, x=None, y=None, theta=None, length=0.5):
if x is None:
x = random.uniform(0, 1)
if y is None:
y = random.uniform(0, 1)
if theta is None:
theta = random.uniform(0, math.pi)
self.needle_coordinates = np.array([x, y])
self.complex_representation = np.array(
[length/2 * math.cos(theta), length/2*math.sin(theta)])
self.end_points = np.array([np.add(self.needle_coordinates, -1*np.array(
self.complex_representation)), np.add(self.needle_coordinates, self.complex_representation)])
def intersects_with_y(self, y):
return self.end_points[0][1] < y and self.end_points[1][1] > y
class BuffonSimulation:
def __init__(self):
self.floor = []
self.boards = 2
self.list_of_needle_objects = []
self.number_of_intersections = 0
fig = plt.figure(figsize=(10, 10))
self.buffon = plt.subplot()
self.results_text = fig.text(
0, 0, self.estimate_pi(), size=15)
self.buffon.set_xlim(-0.1, 1.1)
self.buffon.set_ylim(-0.1, 1.1)
def plot_floor_boards(self):
for j in range(self.boards):
self.floor.append(0+j)
self.buffon.hlines(
y=self.floor[j], xmin=0, xmax=1, color='black', linestyle='--', linewidth=2.0)
def toss_needles(self):
needle_object = DefineNeedle()
self.list_of_needle_objects.append(needle_object)
x_coordinates = [needle_object.end_points[0]
[0], needle_object.end_points[1][0]]
y_coordinates = [needle_object.end_points[0]
[1], needle_object.end_points[1][1]]
for board in range(self.boards):
if needle_object.intersects_with_y(self.floor[board]):
self.number_of_intersections += 1
self.buffon.plot(x_coordinates, y_coordinates,
color='green', linewidth=1)
return
self.buffon.plot(x_coordinates, y_coordinates,
color='red', linewidth=1)
def estimate_pi(self, needles_tossed=0):
if self.number_of_intersections == 0:
estimated_pi = 0
else:
estimated_pi = (needles_tossed) / \
(1 * self.number_of_intersections)
error = abs(((math.pi - estimated_pi)/math.pi)*100)
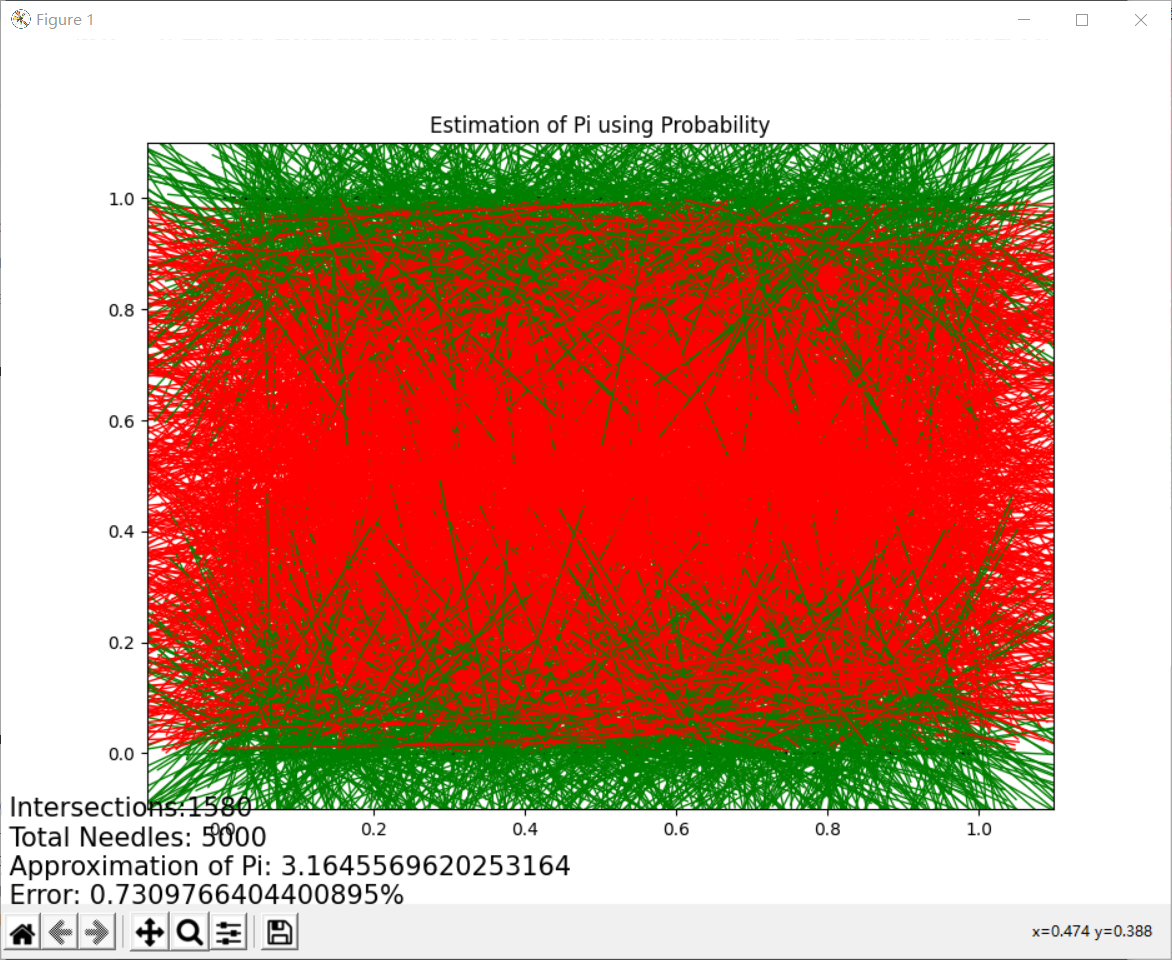
return (" Intersections:" + str(self.number_of_intersections) +
"\n Total Needles: " + str(needles_tossed) +
"\n Approximation of Pi: " + str(estimated_pi) +
"\n Error: " + str(error) + "%")
def plot_needles(self):
for needle in range(NUMBER_OF_NEEDLES):
self.toss_needles()
self.results_text.set_text(self.estimate_pi(needle+1))
if (needle+1) % 200 == 0:
plt.pause(1/200)
plt.title("Estimation of Pi using Probability")
def plot(self):
self.plot_floor_boards()
self.plot_needles()
plt.show()
simulation = BuffonSimulation()
simulation.plot()
效果如圖:
以上內容參考:
- 課程視訊
- https://www.section.io/engineering-education/buffon-needle/
- https://github.com/topics/buffon-needle
- https://github.com/GunnarDahm/buffon_monte_carlo_sim/blob/master/buffon_monte_carlo.py
- https://blog.csdn.net/qq_45757739/article/details/108387567
- https://blog.csdn.net/TSzero/article/details/111604960
理解思想即可,如果後續有機會,可能單出一篇介紹介紹,也有可能將這部分豐富一下。
6.3 估計陰影部分的面積
我們稍微推廣一下,試著用蒙特卡洛解決一個陰影部分面積的求解。比如下圖:
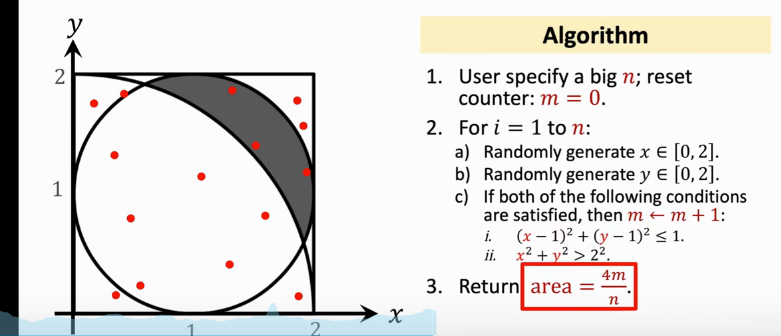
我們如何使用蒙特卡洛的思路解決這個陰影部分面積的求解呢?
類似於上面的思路,在正方形內做隨機均勻抽樣,得到很多點,怎麼確定點在陰影部分呢?
可知,陰影部分的點滿足:
- 易知,正方形面積 \(A_1=4\);設陰影部分面積為 \(A_2\)
- 隨機抽樣的點落在陰影部分的概率為:\(P=\frac{A_2}{A_1}=\frac{A_2}{4}\)
- 從正方形區域抽樣 n 個點,n儘可能大,則來自陰影部分點的期望為:\(nP=\frac{nA_2}{4}\);
- 如果實際上滿足上述條件的點 有 m 個,則令 \(m\approx nP\)
- 得到:\(A_2\approx \frac{4m}{n}\)
程式碼與 6.1 相近。
6.4 求不規則積分
近似求積分是蒙特卡洛在工程和科學問題中最重要的應用。很多積分是沒有解析的積分(即可以計算出來的積分),特別是多元積分,而只能用數值方法求一個近似值,蒙特卡洛就是最常用的數值方法。
一元函數步驟如下:
我們要計算一個一元函數的定積分 \(I = \int_a^bf(x)dx\);
-
從區間 \([a,b]\) 上隨機均勻抽樣 \(x_1,x_2,...,x_n\);
-
計算 \(Q_n = (b-a)\frac{1}{n}\sum_{i=1}^nf(x_i)\),即均值乘以區間長度;
這裡均值乘以區間長度是 實際值,而 I 是期望值
-
用 \(Q_n\) 近似 \(I\)
大數定律保證了 當\(n\rightarrow\infty,Q_n\rightarrow I\)
多元函數步驟如下:
我們要計算一個多元函數的定積分 \(I = \int_a^bf(\vec{x})d\vec{x}\),積分割區域為 \(\Omega\);
-
從區間 \(\Omega\) 上隨機均勻抽樣 \(\vec{x_1},\vec{x_2},...,\vec{x_n}\);
-
計算 \(\Omega\) 的體積V(高於三維同樣):\(V=\int_\Omega{d\vec{x}}\);
hh值得注意的是,這一步仍要計算定積分,如果形狀過於複雜,無法求得 V,那麼無法繼續進行,則無法使用蒙特卡洛演演算法。所以只能適用於比較規則的區域,比如圓形,長方體等。
-
計算 \(Q_n =V \frac{1}{n}\sum_{i=1}^nf(\vec{x_i})\),即均值乘以區間長度;
這裡均值乘以區間長度是 實際值,而 I 是期望值
-
用 \(Q_n\) 近似 \(I\)
下面我們從積分的角度再來看看 蒙特卡洛近似求 pi
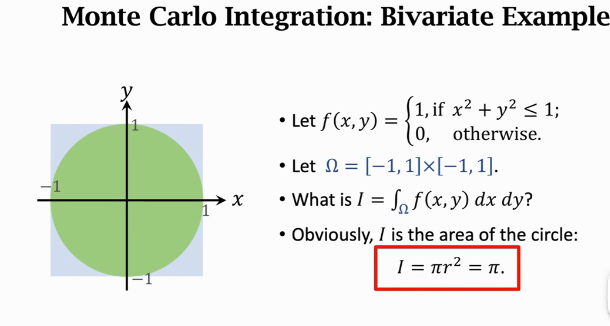
- 定義一個二元函數 \(f(x,y)=\begin{cases} 1 \ \ if點在圓內\\ 0 \ \ if 點在圓外\end{cases}\);
- 定義一個區間 \(\Omega=[-1,1]×[-1,1]\)
- \(I =\pi {r^2}=\pi\)
- 接下來用蒙特卡洛近似 I,得到關於 \(\pi\)的算式即可得到近似的\(\pi\);
- 隨機抽樣 n 個點,記為\((x_1,y_1),...,(x_n,y_n)\)
- 計算 區域面積 \(V = \int_\Omega{dxdy}=4\);
- 計算 \(Q_n =V \frac{1}{n}\sum_{i=1}^nf(x_i,y_i)\)
- 蒙特卡洛近似 Q 與 I 近似相等:\(\pi=Q_n=\int_\Omega{f(x,y)}{dxdy}\)
這是從蒙特卡洛積分的角度得到的pi,6.1 中則是從蒙特卡洛概率和期望的角度得到的。
6.5 用蒙特卡洛近似期望
這個方法對於統計學和機器學習很有用。
- 定義 X 是 d 維的隨機變數,函數 p(x) 是一個PDF,概率密度函數;
- 函數 \(f(x)\) 的期望:\(\mathbb{E}_{x\sim{p}}[f(X)]=\int_{R^d}f(X)\cdotp(x)dx\)
- 直接以上面的方式求期望可能並不容易,所以通常使用蒙特卡洛近似求期望:
- 隨機抽樣:根據概率密度函數 \(p(x)\) 進行隨機抽樣,記為\(X_1,X_2,...,X_n\);
- 計算 \(Q_n =\frac{1}{n}\sum_{i=1}^nf(x_i)\)
- 用 Q 近似 期望\(\mathbb{E}_{x\sim{p}}[f(X)]\)
6.6 總結 | 蒙特卡洛演演算法的思想
我的想法是儘量精簡,即:
模擬---抽樣---估值,通過模擬出來的大量樣本集或者隨機過程,以隨機抽樣的方式,去近似我們想要研究的實際問題物件。
補充蒙特卡洛相關:
蒙特卡洛是摩洛哥的賭場;
蒙特卡洛演演算法得到的結果通常是錯誤的,但很接近真實值,對於對精度要求不高的機器學習已經足夠。
隨機梯度下降就是一種蒙特卡洛演演算法,用隨機的梯度近似真實的梯度,不準確但是降低了計算量。
蒙特卡洛是一類隨機演演算法,除此以外還有很多隨機演演算法,比如拉斯維加斯演演算法(結果總是正確的演演算法)
x. 參考教學
- 視訊課程:深度強化學習(全)_嗶哩嗶哩_bilibili
- 視訊原地址:https://www.youtube.com/user/wsszju
- 課件地址:https://github.com/wangshusen/DeepLearning