經緯度座標轉換為距離及角度(Python)
2020-10-31 11:01:06
最近專案上有這樣的需求,需要依據裝置的經緯度座標計算距離及角度。經驗證後效果較好,並分享。
1 經緯度轉換距離程式碼
#!/usr/bin/env python
# -*- coding: utf-8 -*-
__author__ = 'Seven'
import math
# 計算距離
def getDistance(latA, lonA, latB, lonB):
ra = 6378140 # 赤道半徑
rb = 6356755 # 極半徑
flatten = (ra - rb) / ra # Partial rate of the earth
# change angle to radians
radLatA = math.radians(latA)
radLonA = math.radians(lonA)
radLatB = math.radians(latB)
radLonB = math.radians(lonB)
pA = math.atan(rb / ra * math.tan(radLatA))
pB = math.atan(rb / ra * math.tan(radLatB))
x = math.acos(math.sin(pA) * math.sin(pB) + math.cos(pA) * math.cos(pB) * math.cos(radLonA - radLonB))
c1 = (math.sin(x) - x) * (math.sin(pA) + math.sin(pB)) ** 2 / math.cos(x / 2) ** 2
c2 = (math.sin(x) + x) * (math.sin(pA) - math.sin(pB)) ** 2 / math.sin(x / 2) ** 2
dr = flatten / 8 * (c1 - c2)
distance = ra * (x + dr)
distance = round(distance / 1000, 4)
return f'{distance}km'2 經緯度轉化角度程式碼
#!/usr/bin/env python
# -*- coding: utf-8 -*-
__author__ = 'Seven'
import math
# 計算角度
def getDegree(latA, lonA, latB, lonB):
radLatA = math.radians(latA)
radLonA = math.radians(lonA)
radLatB = math.radians(latB)
radLonB = math.radians(lonB)
dLon = radLonB - radLonA
y = math.sin(dLon) * math.cos(radLatB)
x = math.cos(radLatA) * math.sin(radLatB) - math.sin(radLatA) * math.cos(radLatB) * math.cos(dLon)
brng = math.degrees(math.atan2(y, x))
brng = round((brng + 360) % 360, 4)
brng = int(brng)
if (brng == 0.0) or ((brng == 360.0)):
return '正北方向'
elif brng == 90.0:
return '正東方向'
elif brng == 180.0:
return '正南方向'
elif brng == 270.0:
return '正西方向'
elif 0 < brng < 90:
return f'北偏東{brng}'
elif 90 < brng < 180:
return f'東偏南{brng - 90}'
elif 180 < brng < 270:
return f'西偏南{270 - brng}'
elif 270 < brng < 360:
return f'北偏西{brng - 270}'
else:
pass3 驗證
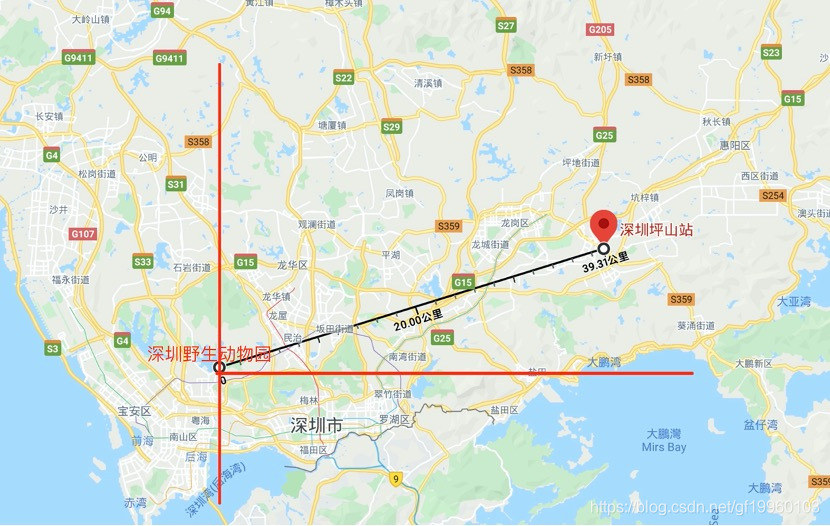
選取深圳野生動物園(22.599578, 113.973129)為起點,深圳坪山站(22.6986848, 114.3311032)為終點,結合百度地圖、谷歌地圖等進行效果驗證。
程式執行結果如下:
百度測距為38.3km
Google地圖手動測距為39.31km
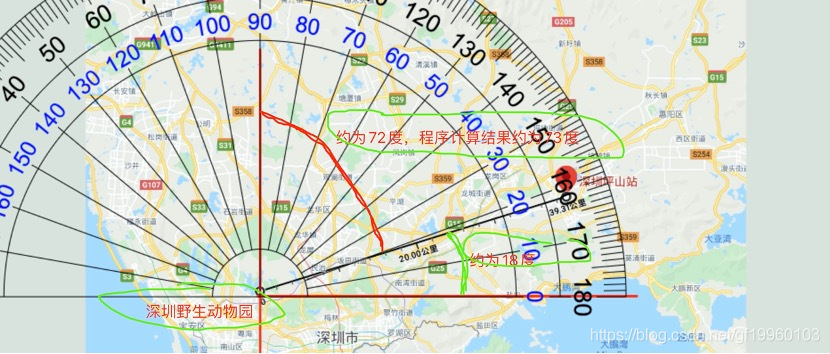
距離與角度均無問題。