基於橢圓擬合的環島識別方法
00摘要

環島元素是智慧車比賽中較難處理的元素之一。比賽要求智慧車能檢測到環島並從入口駛入,在繞行約 270°後駛出環島,其中,能否高響應、高魯棒性地檢測環島是後續進出環島等步驟的基礎。本文根據計算機視覺中的多檢視幾何學證明了環島橢圓投影的存在,使用優化的最小二乘法擬合法並結合相關限制條件以識別環島。
▲ 主機板PCB
01引言

環島元素是智慧車比賽中較難處理的元素之一,由於車身在行駛過程中存在不確定性,故難以保證穩定識別效果。如圖 1-1 與圖 1-2 所示。

▲ 圖 C-1 環島灰度圖

▲ 圖 C-2 環島二值化圖
本文分析了傳統電磁識別與攝像頭識別環島的優點和缺點,首先證明了環島橢圓投影的正確性,然後此基礎上提出了一種基於橢圓擬合的環島識別方法,通過拉格朗日運算元優化最小二乘誤差函數使其最小化,並將結果轉化為特徵向量的形式。最後通過模擬和實驗驗證了此環島識別方案的效能,並給出方案評價與可進一步研究的方向。
02現狀和方法

從資訊獲取的不同方式上來說,環島檢測方案可以分為攝像頭識別和電磁識別。
2.1 電磁識別
智慧車大賽道路中先佈置了通有 20kHz、100mA 交變電流的中心電磁引導線,頻率範圍 20k±1kHz,電流範圍 100±20mA。由於電磁引導線完全繞行與環島,在環島圓與賽道的交點處可等效為兩倍電磁場,故可在智慧車前支架設定
電感檢測裝置以檢測智慧車是否到達環島入口處,即點 B 處。若電磁測量值約為正常行駛時的兩倍,可置入環標誌位。
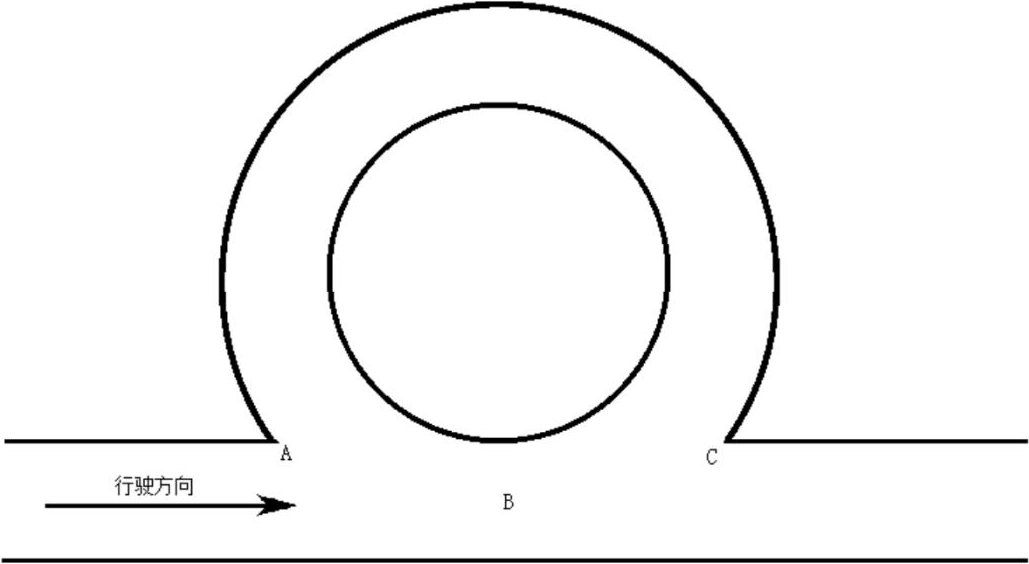
▲ 圖 C-3 環島示意圖
此方案的缺點在於滯後檢測效應。當通過攝像頭正常尋跡時,由於車身到入環點才能檢測到環島,車輛在 A、B 點之間時,由於左側賽道缺失,智慧車會往左側偏移,隨後因掃描到環島內沿而校正回來,該過程使智慧車震盪,導致行駛
到 B 點處位置可能發生偏移,導致電感檢測失敗。此外,對於攝像頭為主要尋跡感測器的智慧車,多加電磁感測器使系統更加冗餘複雜。
2.2 攝像頭識別
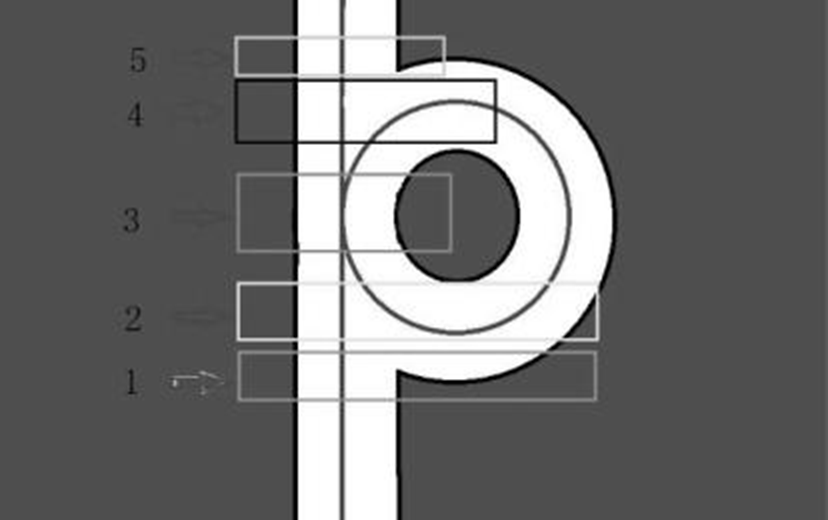
▲ 圖 C-4 流程式環島識別
一種常規的,利用攝像頭進行環島入口識別的方法如下。
(1) 右側賽道突然變寬,左側賽道正常,標誌位置為 1。
(2) 右側賽道丟線,左側賽道正常,標誌位置為 2。
(3) 右側賽道由寬變窄,隨後又逐漸變寬,左側賽道不變,標誌位置為 3。
(4) 右側賽道再次丟線,標誌位置為 4。
(5) 若標誌位等於 4,則識別到環島。
該方案計算量較小,但仍然存在滯後檢測效應,智慧車會在區間 2 處小幅度右轉,影響後續過程的判斷過程。除此之外,該方案為流程化方案,若在判斷過程中有一個步驟意外出錯都無法正確判斷為環島入口,導致智慧車無法入環甚至衝出賽道。
03環島橢圓投影

對橢圓的投影進行建模,如下圖所示。將P平明的圓投影到H平面。設P平面的橢圓長半軸長度為A,短半軸的長度為B。P平面與H平面的夾角為
α
\alpha
α。
取 0 0 < α < 9 0 0 0^0 < \alpha < 90^0 00<α<900。於P平面建立笛卡爾座標系XOY,橢圓長軸在X軸上,橢圓短軸在Y軸上,線段OO1的長度為L。可以平面P上的橢圓方程為:

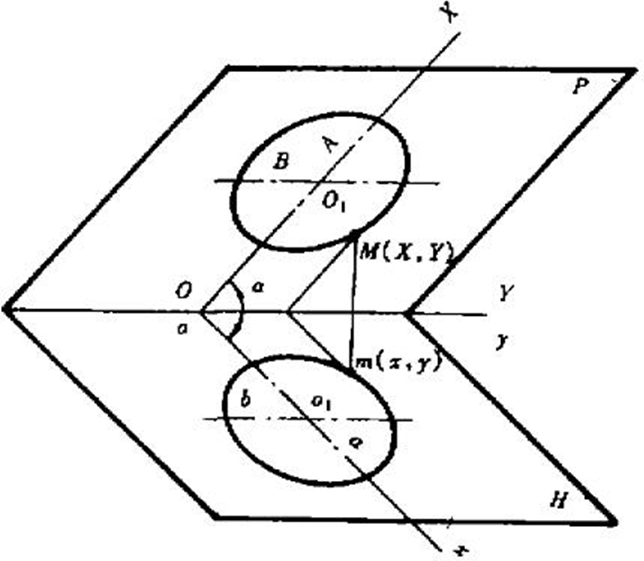
▲ 圖 C-5 橢圓對映圖
一束平行光以 O 1 o 1 O_1 o_1 O1o1的方向照燒,是P平面橢圓對映在H平面上,形成橢圓o1。
在平面H上建立笛卡爾座標系,oy與OY相重合,OX投影於ox,橢圓上一點M(X,Y)投影到m(x,y),可知兩平面的座標系關係為:

聯立C-1與C-2,得:

令
m
=
A
⋅
cos
α
,
n
=
B
,
p
=
L
⋅
cos
α
m = A \cdot \cos \alpha ,\,\,n = B,\,\,p = L \cdot \cos \alpha
m=A⋅cosα,n=B,p=L⋅cosα
將C-3記作:

顯然,C-4為橢圓方程,即平面P上的橢圓經過平行光投影后仍然是橢圓。
特殊的,當平面P上的橢圓為圓時,有:
L
=
0
,
A
=
B
=
R
L = 0,A = B = R
L=0,A=B=R,則C-3為:

令
m
′
=
R
⋅
cos
α
,
n
′
=
n
m' = R \cdot \cos \alpha ,\,\,n' = n
m′=R⋅cosα,n′=n,平面H上的投影為:
x
2
m
′
2
+
y
2
n
′
2
=
1
{{x^2 } \over {m'^2 }} + {{y^2 } \over {n'^2 }} = 1
m′2x2+n′2y2=1
顯然,當 cos α ≠ 1 \cos \alpha \ne 1 cosα=1時, m ′ ≠ n ′ m' \ne n' m′=n′,該解析式描述的為橢圓。
對於環島元素,設內環島邊緣為平面P上的圓。自然光線在P平面上的發生反射。由於物象距離較遠,反射光可近似為平行光。根據攝像機的真空成像模型,反射光在詳平面成像,即影象平面為H平面。因此,只需驗證內環島邊緣微橢圓即可。
▲ C 車模電機驅動PCB
04最小二乘擬合

設橢圓一般方程為:
F
(
a
,
x
)
=
a
⋅
x
=
a
x
2
+
b
x
y
+
c
y
2
+
d
x
+
e
y
+
f
=
0
F\left( {a,x} \right) = a \cdot x = ax^2 + bxy + cy^2 + dx + ey + f = 0
F(a,x)=a⋅x=ax2+bxy+cy2+dx+ey+f=0
其中,
a
=
[
a
,
b
,
c
,
d
,
e
,
f
]
T
a = \left[ {a,b,c,d,e,f} \right]^T
a=[a,b,c,d,e,f]T
x = [ x 2 , x y , y 2 , x , y , 1 ] T x = \left[ {x^2 ,xy,y^2 ,x,y,1} \right]^T x=[x2,xy,y2,x,y,1]T
對於一個待擬合的離散點集合, X i = ( x , y ) X_i = \left( {x,y} \right) Xi=(x,y), F ( a , X i ) F\left( {a,X_i } \right) F(a,Xi)表示點Xi到橢圓 F ( a , x ) F\left( {a,x} \right) F(a,x)的幾何距離。
最小二乘法的目標是求取使得李散掉的幾何距離最短的a,即最小化:
D
a
=
∑
i
=
1
N
F
(
a
,
X
i
)
2
D_a = \sum\limits_{i = 1}^N {F\left( {a,X_i } \right)^2 }
Da=i=1∑NF(a,Xi)2
由於環島內邊緣投影為橢圓,而F(a,x)為廣義圓錐曲線一般表示式,需要表示為新增約束條件,以保證你和結果僅為橢圓。即:
4
a
c
−
b
2
=
1
4ac - b^2 = 1
4ac−b2=1
為了表達方便,將前面方程吧粗歘在:
a T C a = 1 a^T Ca = 1 aTCa=1
其中:
c
=
[
0
0
2
0
0
0
0
−
1
0
0
0
0
2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
]
c = \begin{bmatrix} \begin{matrix} 0 & 0 & 2 & 0 & 0 & 0\\0 & { - 1} & 0 & 0 & 0 & 0\\2 & 0 & 0 & 0 & 0 & 0\\0 & 0 & 0 & 0 & 0 & 0\\0 & 0 & 0 & 0 & 0 & 0\\\end{matrix} \end{bmatrix}
c=⎣⎢⎢⎢⎢⎡002000−100020000000000000000000⎦⎥⎥⎥⎥⎤
故問題轉換為最小化誤差函數:
E
=
∥
D
a
∥
2
E = \left\| {Da} \right\|^2
E=∥Da∥2
約束條件為: a T C a = 1 a^T Ca = 1 aTCa=1
其中矩陣: D = [ X 1 X 2 ⋯ X N ] D = \left[ {X_1 X_2 \cdots X_N } \right] D=[X1X2⋯XN]
對於一個離散點:
X
i
=
[
x
2
,
x
y
,
y
2
,
x
,
y
,
1
]
X_i = \left[ {x^2 ,xy,y^2 ,x,y,1} \right]
Xi=[x2,xy,y2,x,y,1]
根據拉格朗日乘子法,求解
z
=
f
(
x
,
y
)
z = f\left( {x,y} \right)
z=f(x,y)在條件
ϕ
(
x
,
y
)
=
1
\phi \left( {x,y} \right) = 1
ϕ(x,y)=1下的極值,構造Lagrange函數:
L
(
x
,
y
,
λ
)
=
f
(
x
,
y
)
+
λ
ϕ
(
x
,
y
)
L\left( {x,y,\lambda } \right) = f\left( {x,y} \right) + \lambda \phi \left( {x,y} \right)
L(x,y,λ)=f(x,y)+λϕ(x,y)
令:

求出x,y,lambda,可以得到:
2
D
T
D
a
−
2
λ
C
a
=
0
2D^T Da - 2\lambda Ca = 0
2DTDa−2λCa=0
令
D
T
D
=
S
D^T D = S
DTD=S,則有:
S
a
=
λ
C
a
Sa = \lambda Ca
Sa=λCa
由於S為實對稱矩陣,C為正定矩陣,故求解是為求解廣義特徵值問題。C正定,用
C
−
1
C^{ - 1}
C−1做成上式,可以得到:
C
−
1
S
a
=
λ
a
C^{ - 1} Sa = \lambda a
C−1Sa=λa
令
p
=
C
−
1
S
p = C^{ - 1} S
p=C−1S則:
p
a
=
λ
a
pa = \lambda a
pa=λa
所以只需要求解上式的特徵向量a即可。根據數值分析冪法可求。
05限制條件

根據橢圓一般方程:
F ( a , x ) = a ⋅ x = a x 2 + b x y + c y 2 + d x + e y + f = 0 F\left( {a,x} \right) = a \cdot x = ax^2 + bxy + cy^2 + dx + ey + f = 0 F(a,x)=a⋅x=ax2+bxy+cy2+dx+ey+f=0
可的長半軸長度平方:
A
2
=
2
(
a
X
c
2
+
c
Y
c
2
+
b
X
c
Y
c
−
1
)
a
+
c
+
(
a
−
b
)
2
+
b
2
A^2 = {{2\left( {aX_c^2 + cY_c^2 + bX_c Y_c - 1} \right)} \over {a + c + \sqrt {\left( {a - b} \right)^2 + b^2 } }}
A2=a+c+(a−b)2+b22(aXc2+cYc2+bXcYc−1)
其中橢圓幾何中心:
X
c
=
b
e
−
2
c
d
4
a
c
−
b
2
,
Y
c
=
b
d
−
2
a
e
4
a
c
−
b
2
X_c = {{be - 2cd} \over {4ac - b^2 }},\,\,\,Y_c = {{bd - 2ae} \over {4ac - b^2 }}
Xc=4ac−b2be−2cd,Yc=4ac−b2bd−2ae
根據世紀環島的對映特點,限定如下識別條件:
(1)環島對映非長扁橢圓,約束為
0.2
<
A
B
<
5
0.2 < {A \over B} < 5
0.2<BA<5。
(2)橢圓幾何中心在左上側,或者右上側,約束為
Y
C
>
H
2
Y_C > {H \over 2}
YC>2H,H為影象高度;
(3)以右環島為例,為保證提前識別,約束為右下側出現環島尖角。
06實驗結果

以圖C-2為計算範例,取內環島邊緣點獲取座標。

使用MATLAB 模擬得到橢圓方程為:
F ( a , x ) = 0.00154 x 2 − 0.019 x ⋅ y − 0.156 x F\left( {a,x} \right) = 0.00154x^2 - 0.019x \cdot y - 0.156x F(a,x)=0.00154x2−0.019x⋅y−0.156x + 0.195 ⋅ y 2 − 3.390 y + 38.870 + 0.195 \cdot y^2 - 3.390y + 38.870 +0.195⋅y2−3.390y+38.870
橢圓引數為:
A
=
30.537
,
B
=
5.099
,
X
c
=
150.053
,
Y
c
=
15.788
A = 30.537,\,\,B = 5.099,\,\,\,X_c = 150.053,\,\,Y_c = 15.788
A=30.537,B=5.099,Xc=150.053,Yc=15.788
07總結和展望

本文提出了一種基於橢圓擬合的環島識別方法,相比於傳統的攝像頭識別與電感識別方法,該方法有以下特點。
(1) 無需流程式判斷,降低整體誤判斷概率。
(2) 具有遠前瞻特性,以免智慧車因丟線而誤轉向。
(3) 利用最小二乘的結果代替了程式迭代過程,提高了運算速度。
通過實驗分析研究表明,本文的方案有較快的運算速度、較強的棒性,不過仍有許多需要改進的地方,可在本文的基礎上進行以下深入研究。
(1) 尋找更好的求解特徵向量方法,進一步加快整體運算速度。
(2) 由於攝像機畫素較小,對於較小的橢圓難以正確擬合與判斷,可使用更高素質的攝像機。
(3) 由於車身位置變化,導致穩定尋找內環島邊緣區位置有一定困難,需要尋找更好的搜尋方法。
▲ 車模電機驅動PCB
08參考文獻

[1] 彭慧敏. 平面斜截正圓錐截交線為橢圓時投影曲線分析. 西安建築科技大學學報: 自然科學版, 1998. 30(2): 第189-191頁.
[2] 莫章金. 橢圓的投影及其應用. 重慶建築高等專科學校學報, 1999. 9(2): 第28-31頁.
[3] Fitzgibbon, A., M. Pilu and R.B. Fisher, Direct least square fitting of ellipses. IEEE Transactions on pattern analysis and machine intelligence, 1999. 21(5): p. 476-480.
[4] Hal?r, R. and J. Flusser. Numerically stable direct least squares fitting of ellipses. 1998: Citeseer.
[5] 李成章, 黃玉民. 數學分析. 上北京: 科學出版, 1999.
[6] Trefethen, L.N. and D. Bau III, Numerical linear algebra. Vol. 50. 1997: Siam.
[7] 封建湖. 數值分析原理. 2001: 科學出版社.