計算機實驗室之樹莓派:課程 4 OK04
OK04 課程在 OK03 的基礎上進行構建,它教你如何使用定時器讓 OK 或 ACT LED 燈按精確的時間間隔來閃爍。假設你已經有了 的作業系統,我們將以它為基礎來構建。
1、一個新裝置
定時器是樹莓派保持時間的唯一方法。大多數計算機都有一個電池供電的時鐘,這樣當計算機關機後仍然能保持時間。
到目前為止,我們僅看了樹莓派硬體的一小部分,即 GPIO 控制器。我只是簡單地告訴你做什麼,然後它會發生什麼事情。現在,我們繼續看定時器,並繼續帶你去了解它的工作原理。
和 GPIO 控制器一樣,定時器也有地址。在本案例中,定時器的基地址在 2000300016。閱讀手冊我們可以找到下面的表:
表 1.1 GPIO 控制器暫存器
| 地址 | 大小 / 位元組 | 名字 | 描述 | 讀或寫 |
|---|---|---|---|---|
| 20003000 | 4 | Control / Status | 用於控制和清除定時器通道比較器匹配的暫存器 | RW |
| 20003004 | 8 | Counter | 按 1 MHz 的頻率遞增的計數器 | R |
| 2000300C | 4 | Compare 0 | 0 號比較器暫存器 | RW |
| 20003010 | 4 | Compare 1 | 1 號比較器暫存器 | RW |
| 20003014 | 4 | Compare 2 | 2 號比較器暫存器 | RW |
| 20003018 | 4 | Compare 3 | 3 號比較器暫存器 | RW |
這個表只告訴我們一部分內容,在手冊中描述了更多的欄位。手冊上解釋說,定時器本質上是按每微秒將計數器遞增 1 的方式來執行。每次它是這樣做的,它將計數器的低 32 位(4 位元組)與 4 個比較器暫存器進行比較,如果匹配它們中的任何一個,它更新 Control/Status 以反映出其中有一個是匹配的。
關於位、位元組、位欄位、以及資料大小的更多內容如下:
一個位是一個單個的二進位制數的名稱。你可能還記得,一個單個的二進位制數既可能是一個 1,也可能是一個 0。
一個位元組是一個 8 位集合的名稱。由於每個位可能是 1 或 0 這兩個值的其中之一,因此,一個位元組有 28 = 256 個不同的可能值。我們一般解釋一個位元組為一個介於 0 到 255(含)之間的二進位制數。
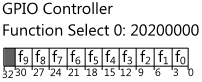
一個位欄位是解釋二進位制的另一種方式。二進位制可以解釋為許多不同的東西,而不僅僅是一個數位。一個位欄位可以將二進位制看做為一系列的 1(開) 或 0(關)的開關。對於每個小開關,我們都有一個意義,我們可以使用它們去控制一些東西。我們已經遇到了 GPIO 控制器使用的位欄位,使用它設定一個針腳的開或關。位為 1 時 GPIO 針腳將準確地開啟或關閉。有時我們需要更多的選項,而不僅僅是開或關,因此我們將幾個開關組合到一起,比如 GPIO 控制器的函數設定(如上圖),每 3 位為一組控制一個 GPIO 針腳的函數。
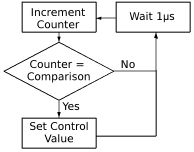
我們的目標是實現一個函數,這個函數能夠以一個時間數量為輸入來呼叫它,這個輸入的時間數量將作為等待的時間,然後返回。想一想如何去做,想想我們都擁有什麼。
我認為這將有兩個選擇:
- 從計數器中讀取一個值,然後保持分支返回到相同的程式碼,直到計數器的等待時間數量大於它。
- 從計數器中讀取一個值,加上要等待的時間數量,將它儲存到比較器暫存器,然後保持分支返回到相同的程式碼處,直到
Control / Status暫存器更新。
這兩種策略都工作的很好,但在本教學中,我們將只實現第一個。原因是比較器暫存器更容易出錯,因為在增加等待時間並儲存它到比較器的暫存器期間,計數器可能已經增加了,並因此可能會不匹配。如果請求的是 1 微秒(或更糟糕的情況是 0 微秒)的等待,這樣可能導致非常長的意外延遲。
像這樣存在被稱為“並行問題”的問題,並且幾乎無法解決。
2、實現
我將把這個建立完美的等待方法的挑戰基本留給你。我建議你將所有與定時器相關的程式碼都放在一個名為 systemTimer.s 的檔案中(理由很明顯)。關於這個方法的複雜部分是,計數器是一個 8 位元組值,而每個暫存器僅能儲存 4 位元組。所以,計數器值將分到 2 個暫存器中。
大型的作業系統通常使用等待函數來抓住機會在後台執行任務。
下列的程式碼塊是一個範例。
ldrd r0,r1,[r2,#4]
ldrd regLow,regHigh,[src,#val]從src中的數加上val之和的地址載入 8 位元組到暫存器regLow和regHigh中。
上面的程式碼中你可以發現一個很有用的指令是 ldrd。它載入 8 位元組的記憶體到兩個暫存器中。在本案例中,這 8 位元組記憶體從暫存器 r2 中的地址 + 4 開始,將被複製進暫存器 r0 和 r1。這種安排的稍微複雜之處在於 r1 實際上只持有了高位 4 位元組。換句話說就是,如果如果計數器的值是 999,999,999,99910 = 11101000110101001010010100001111111111112 ,那麼暫存器 r1 中只有 111010002,而暫存器 r0 中則是 110101001010010100001111111111112。
實現它的更明智的方式應該是,去計算當前計數器值與來自方法啟動後的那一個值的差,然後將它與要求的等待時間數量進行比較。除非恰好你希望的等待時間是占用 8 位元組的,否則上面範例中暫存器 r1 中的值將會丟棄,而計數器僅需要使用低位 4 位元組。
當等待開始時,你應該總是確保使用大於比較,而不是使用等於比較,因為如果你嘗試去等待一個時間,而這個時間正好等於方法開始的時間與結束的時間之差,那麼你就錯過這個值而永遠等待下去。
如果你不明白如何編寫等待函數的程式碼,可以參考下面的指南。
借鑑 GPIO 控制器的創意,第一個函數我們應該去寫如何取得系統定時器的地址。範例如下:
.globl GetSystemTimerBaseGetSystemTimerBase:ldr r0,=0x20003000mov pc,lr另一個被證明非常有用的函數是返回在暫存器
r0和r1中的當前計數器值:.globl GetTimeStampGetTimeStamp:push {lr}bl GetSystemTimerBaseldrd r0,r1,[r0,#4]pop {pc}這個函數簡單地使用了
GetSystemTimerBase函數,並像我們前面學過的那樣,使用ldrd去載入當前計數器值。現在,我們可以去寫我們的等待方法的程式碼了。首先,在該方法啟動後,我們需要知道計數器值,我們可以使用
GetTimeStamp來取得。delay .req r2mov delay,r0push {lr}bl GetTimeStampstart .req r3mov start,r0這個程式碼複製了我們的方法的輸入,將延遲時間的數量放到暫存器
r2中,然後呼叫GetTimeStamp,這個函數將會返回暫存器r0和r1中的當前計數器值。接著複製計數器值的低位 4 位元組到暫存器r3中。接下來,我們需要計算當前計數器值與讀入的值的差,然後持續這樣做,直到它們的差至少是
delay的大小為止。loop$:bl GetTimeStampelapsed .req r1sub elapsed,r0,startcmp elapsed,delay.unreq elapsedbls loop$這個程式碼將一直等待,一直到等待到傳遞給它的時間數量為止。它從計數器中讀取數值,減去最初從計數器中讀取的值,然後與要求的延遲時間進行比較。如果過去的時間數量小於要求的延遲,它切換回
loop$。.unreq delay.unreq startpop {pc}程式碼完成後,函數返回。
3、另一個閃燈程式
你一旦明白了等待函數的工作原理,修改 main.s 去使用它。修改各處 r0 的等待設定值為某個很大的數量(記住它的單位是微秒),然後在樹莓派上測試。如果函數不能正常工作,請檢視我們的排錯頁面。
如果正常工作,恭喜你學會控制另一個裝置了,會使用它,則時間由你控制。在下一節課程中,我們將完成 OK 系列課程的最後一節 課程 5:OK05,我們將使用我們已經學習過的知識讓 LED 按我們的模式進行閃爍。