一文詳解貝葉斯優化(Bayesian Optimization)原理
參考資料:
Expected Improvement formula for Bayesian Optimisation
通俗科普文:貝葉斯優化與SMBO、高斯過程迴歸、TPE
理解貝葉斯優化
A Tutorial on Bayesian Optimization
貝葉斯優化是一種求解函數最優值的演演算法,它最普遍的使用場景是在機器學習過程中對超引數進行調優。貝葉斯優化演演算法的核心框架是SMBO (Sequential Model-Based Optimization),而貝葉斯優化(Bayesian Optimization)狹義上特指代理模型為高斯過程迴歸模型的SMBO。
問題介紹
- 輸入:\(x\in R^d\),一般\(d\le20\),即引數在20個以內。
- 可行集(feasible set)\(A\): 一般是超多邊形(\(x\in R^d: a_i\le x_i \le b_i\))或d維的simplex(\(x\in R^d: \sum_ix_i=1\))
- 在使用貝葉斯優化時,目標函數\(f\):
- 需要是連續函數
- 評估成本昂貴,能允許執行的次數有限
- 是黑盒,公式/特徵未知,例如:不是凹函數、線性函數之類的。
- 因為不對函數做任何假設,所以只能存取f,不能存取其一階、二階導數。
- 可以有噪聲,但需要假設每個觀測值的噪聲是獨立同分布,均值為0,方差恆定。
SMBO (Sequential Model-Based Optimization)
SMBO是一套優化框架,也是貝葉斯優化所使用的核心框架。它有兩個重要組成部分:
- 一個代理模型(surrogate model),用於對目標函數進行建模。代理模型通常有確定的公式或者能計算梯度,又或者有已知的凹凸性、線性等特性,總之就是更容易用於優化。更泛化地講,其實它就是一個學習模型,輸入是所有觀測到的函數值點,訓練後可以在給定任意\(x\)的情況下給出對\(f(x)\)的估計。
- 一個優化策略(optimization strategy),決定下一個取樣點的位置,即下一步應在哪個輸入\(x\)處觀測函數值\(f(x)\)。通常它是通過採集函數(acquisition function) 來實現的:
採集函數通常是一個由代理模型推出的函數,它的輸入是可行集(feasible set)\(A\)上的任意值,輸出值衡量了每個輸入\(x\)有多值得被觀測。通常會從以下兩方面考慮:- 有多大的可能性在x處取得最優值
- 評估x是否能減少貝葉斯統計模型的不確定性
採集函數通常也是容易求最優值的函數(例如:有公式/能算梯度,等),下一個取樣點就是可行集上的最大值點,即使採集函數的取最大值的點。
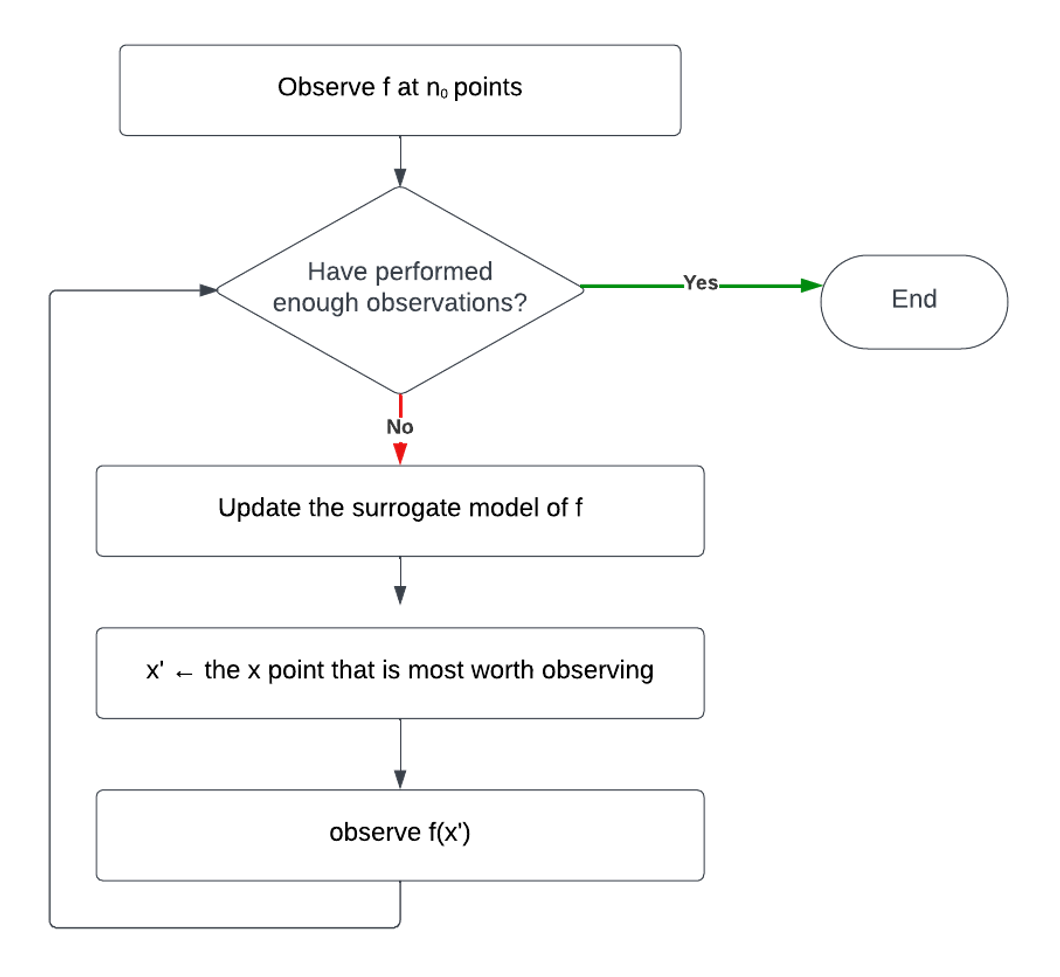
該框架的主要流程是:
代理模型(Surrogate Model)
代理模型可以有很多,高斯過程、隨機森林……等等。其中,貝葉斯優化(Bayesian Optimization) 狹義上特指代理模型為高斯過程迴歸模型的SMBO。
隨機過程
隨機過程(Stochastic/Random Process)可以理解為一系列隨機變數的集合。更具體地說,它是概率空間上的一族隨機變數\(\{X(t),t\in T\}\), 其中是t引數,而T又被稱作索引集(index set),它決定了構成隨機過程的隨機變數的個數,大部分情況下,隨機變數都是無限個的。
- 當\(T=\{0,1,2,...\}\)時稱之為隨機序列或時間序列
- 引數t經常被解釋為時間。
- 引數空間T是向量集合時,隨機過程\(\{X(t),t\in T\}\)稱為隨機場。
- 隨機過程有時也被稱為隨機函數(Random Function),因為它也可以被理解為函數值是隨機變數的函數。
\(X(t)\)表示系統在時刻t所處的狀態。的所有可能狀態構成的集合為狀態空間,記為S。
隨機過程的直觀理解
隨機過程的直觀含義是我們在 t=0 時刻(此時此刻)來考慮未來每個時間點會發生的情況。
例如,當我們把\(t\)解釋為時間,而\(X(t)\)解釋為粒子位置時,隨機過程就可以被直觀地理解為粒子的一種隨機運動,它在每個時刻下的位置都是隨機的,並且不同時刻\(t_1\)和\(t_2\)對應的\(X(t_1)\)和\(X(t_2)\)是相關的,它們的相關性由協方差\(cov[X(t_1),X(t_2)]\)定義。
辨析隨機變數和隨機函數
假設:
- \(x\)是一個變數
- \(X\)是一個隨機變數,它服從一個概率分佈\(P(X<t)=p(t)\)
- \(f\)是一個函數,例如:\(f(x)=x+1\)
- \(g\)是一個隨機函數
那麼有:
- \(f(x)\)代表一個因變數,當\(x\)確定時,也確定。例如:\(f(x)=x+1\),\(f(1)=2\)
- \(f(X)\)代表一個隨機變數,它的隨機性是隨機變數\(X\)帶來的,所以它的概率分佈也跟的概率分佈有關。例如:\(f(x)=x+1\),\(P(f(X)<t)=P(X+1<t)=P(X<t-1)\)
- \(g(x)\)也代表一個隨機變數,但它的隨機性是隨機過程\(g\)帶來的。
高斯過程
高斯過程(Gaussian Process)是一類隨機過程\(\{F(x),x\in A\}\),它的任意n維分佈\(\{F(x_1),...,F(x_n)\}\)(n也是任意的)都服從多元正態分佈,即:對任意有限個\(x_1,...,x_n\in A\),\(F(x_1),...,F(x_n)\)的任意線性組合\(a_1F(x_1)+...+a_nF(x_n)\)都是一個正態分佈。
正如一個正態分佈可以通過指定均值和方差來確定,一個高斯過程可以通過指定均值函數 \(m(x)\) 和協方差函數 \(K(x,x')\)唯一確定:
則高斯過程可以表示為:
均值函數定義了每個索引\(x\)對應的隨機變數(同時也是正態分佈變數)\(F(x)\)的均值;而協方差函數不僅定義了每個索引的方差\(K(x,x')\),還定義了任意兩個索引\(x_1\)、\(x_2\)對應的隨機變數\(F(x_1 )\)\(F(x_1)\)\(F(x_2)\)之間的相關性\(K(x_1, x_2)\)。
在高斯過程模型裡,協方差函數也被稱作核函數(Kernel function)。
高斯過程迴歸
高斯過程迴歸(Gaussian Process Regression)就是使用高斯過程模型\(F(x)\)去擬合目標函數\(f(x)\)。
讓我們先回顧一下,使用正態分佈\(N(\mu,\sigma^2)\)去擬合一個隨機變數X的步驟:
- 建模前,我們知道正態分佈的均值和標準差都是常數,分別假設為\(\mu\) 和\(\sigma^2\)。
- 對隨機變數X進行t次取樣,得到觀測值\(x_1,...,x_t\)(簡記為\(x_{1:t}\))
- 根據觀測值計算出最優的\(\mu\) 和\(\sigma\)值,由此確定最終正態分佈的樣子,從而完成對X的擬合
高斯過程迴歸也是類似的:
- 建模前,我們需要事先指定好均值函數 \(m(x)\) 和協方差函數 \(K(x,x')\),它定義了高斯過程\(F(x)\)的先驗分佈。
- 有一些超引數會存在於均值函數和協方差函數中。前面提到的正態分佈擬合就像是一種簡化:\(m(x)=\mu\),\(K(x,x')=\sigma^2\),這裡\(\mu\) 和\(\sigma\)可以被理解為是兩個超引數。
- 選擇t個取樣索引\(x_1,...,x_t\)(簡記為\(x_{1:t}\)),得到目標函數的觀測值\(f(x_1),...,f(x_t)\)(簡記為\(f(x_{1:t})\)),它們同樣也是高斯過程裡對應的隨機變數\(F(x_1),...,F(x_t)\) \(F(x_1),...,F(x_t)\)\(F(x_{1:t})\))的觀測值
- 根據觀測值調整均值函數和協方差函數裡的超引數,由此確定最終高斯過程的樣子,從而完成對函數\(f(x)\)的擬合。
常用均值函數
-
常數函數
\[m(x)=\mu \]這裡\(\mu\)是一個超引數。即使將均值統一設定為常數,因為有方差的作用,依然能夠對資料進行有效建模。
-
parametric function
\[m(x)=\mu + \sum_{i=1}^P\beta_i\Psi_i(x) \]這裡\(\mu\),\(\beta_i\)都是超引數。
常用協方差函數
在迴歸任務裡,由於目標函數f是連續函數,因此對協方差函數最基礎的要求是有該性質:
x與x’距離越近時,f(x)與f(x’)相關性越大。即:
常用協方差函數有:
-
Power exponential / Gaussian
\[K(x,x')=\alpha_0 e^{-||x-x'||^2} \]這裡\(||x-x'||^2=\sum_{i=1}^d\alpha_i(x_i-x'_i)^2\),不是標準的L2正規化的寫法,d是自變數x的維度數量,即引數的個數。\(\alpha_{0:d}\)是d+1個超引數。
-
Màtern
\[K(x,x')=\alpha_0 \frac{2^{1-\nu}}{\Gamma(\nu)}(\sqrt{2\nu}||x-x'||)^\nu K_\nu(\sqrt{2\nu}||x-x'||) \]\(K_\nu\)是modified Bessel functions of the second kind。
如何計算超引數
採用最大後驗估計(MAP,Maximum A Posterior estimate),選擇在觀測值已知的情況下最可能的超引數值。
\(\eta\)代表超引數集合,\(P(\eta|F(x_{1:t})=f(x_{1:t}))\)代表在得到所有觀測值的情況下,超引數的概率分佈。
使用貝葉斯公式進行轉換:
這也是以高斯過程為代理模型的SMBO又被叫做貝葉斯優化的原因。
由於分母與超引數無關,因此只需要最大化分子:
\(P(F(x_{1:t})=f(x_{1:t})|\eta)\)是給定引數的情況下,得到所有觀測值的概率。
\(P(\eta)\)是超引數取值的先驗概率,在某些問題,可以假設某些引數更可能被使用。但更常見的情況是假設其為等概率分佈,那麼MAP就是退化為最大似然估計(MLE, Maximum Likelihood Estimate),即選擇使觀測值最可能出現的超引數值:
由於在高斯過程中,觀測點\(x_{1:t}\)對應的隨機變數構成的多維隨機變數[\(F(x_1),...,F(x_t)\)](簡記作\(F(x_{1:t})\))服從多元正態分佈。其中,
-
分佈的均值是一個t維向量:\(\mathbf{\mu_t}=[m(x_1),...,m(x_t)]\)。其中,\(m(x_i)\)代表第i個隨機變數\(F(x_i)\)的期望/均值\(E[F(x_i)]\)。
-
分佈的協方差矩陣是一個\(t\times t\)的矩陣,記作:
\[\mathbf{\Sigma_t} =\begin{bmatrix} K(x_1,x_1)&...&K(x_1,x_t) \\ ...&...&... \\ K(x_t,x_1)&...&K(x_t,x_t) \\ \end{bmatrix} \]
概率密度函數為
由於觀測點\(x_{1:t}\)是已知的,因此,它是一個以超引數為變數的函數,我們可以選擇使該概率(密度)最大化的超引數值。
轉化為對數似然函數:
要最大化它,即是最小化:
它是一個已知公式可以求梯度的函數,因此在程式設計中可以通過梯度下降等方法去求解其最優值。
預測\(f(x)\)
在SMBO框架下,代理模型預測的不僅僅是函數值\(f(x)\),而是它的後驗分佈\(F(x)|F(x_{1:t})=f(x_{1:t})\),即,在已知t個觀測點的值的情況下,\(f(x)\)取不同值的概率。
由於在高斯過程裡,也符合多元正態分佈,因此就是多元正態分佈的條件分佈(或邊緣分佈)。這個分佈服從正態分佈,其均值和方差如下:
其中,
由於均值函數\(m(x)\)、協方差函數\(K(x,x')\)都是確定公式的函數,公式裡的超引數也確定下來了,因此\(\mu (x)\)和\(\sigma^2(x)\)都是確定的函數,對任意給定的\(x\),都可以計算出值來。
通常,我們使用這個後驗分佈的期望/均值來作為函數值\(f(x)\)的預測值:
【命題1】對任意\(A=[a_1,...,a_t]^T\),\(i=1,...,t\),都有\(K(x_i,x_{1:t})K(x_{1:t},x_{1:t})^{-1}A=a_i\)。證明見附錄。
因此,對於已經觀測到的點\(x_i,i=1,...,t\),我們就有:
因此,擬合出來的模型就像這樣:
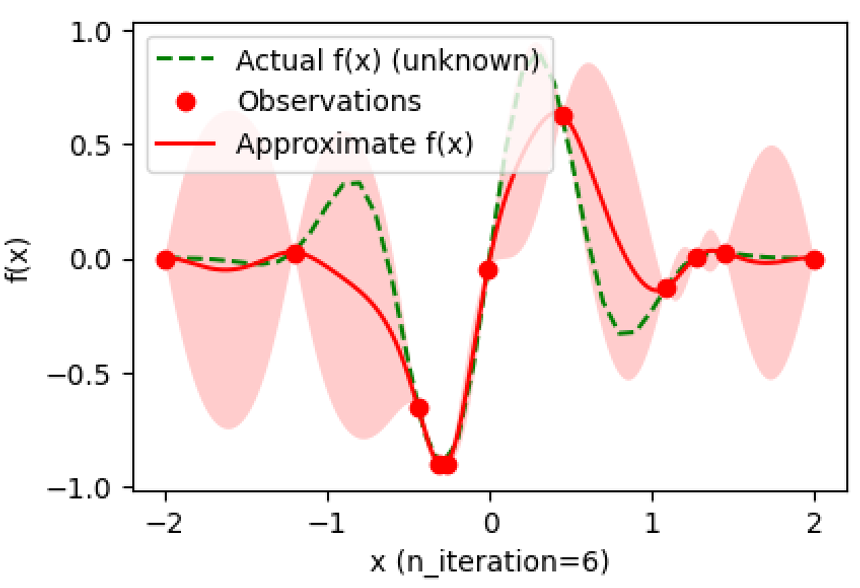
紅色陰影部分是預測的95%置信區間。
採集函數(Acquisition Function)
由於代理模型輸出了函數f的後驗分佈\(F(x)|F(x_{1:t})=f(x_{1:t})\),我們可以利用這個後驗分佈去評估下一個取樣點應該在哪個位置。由於在採集函數階段我們討論的都是後驗分佈,因此後文中將省略條件部分,提到\(F(x)\)時指的都是\(F(x)|F(x_{1:t})=f(x_{1:t})\)。
通常做法是設計一個採集函數\(A(x, F(x)|F(x_{1:t})=f(x_{1:t}))\),它的輸入相當於對每個取樣點x進行打分,分數越高的點越值得被取樣。
一般來說,採集函數需要滿足下面的要求:
- 在已有的取樣點處採集函數的值更小,因為這些點已經被探索過,再在這些點處計算函數值對解決問題沒有什麼用
- 在置信區間更寬(方差更大)的點處採集函數的值更大,因為這些點具有更大的不確定性,更值得探索
- 對最大(小)化問題,在函數均值更大(小)的點處採集函數的值更大,因為均值是對該點處函數值的估計值,這些點更可能在極值點附近。
有非常多種採集函數可供選擇,這裡簡單介紹一些作為例子。
Expected Improvement (EI)
當我們已經取樣過t個點之後,總會有一個最優點\(x_m\),使得:
假設我們還可以再觀測一輪,得到\(F(x)=f(x)\),最優點將在\(f(x)\)和\(f^*_t\)之間產生。不妨令
由於現在\([F(x)-f^*_t]^+\)是一個隨機變數,因此我們可以計算它的期望:
其中,\(\mu(x)\)和\(\sigma(x)\)是正態分佈\(F(x)\)的均值和標準差,即後驗均值和標準差\(\sqrt{\sigma^2(x)}\)。
\(\varphi(x)\)為標準正態分佈的概率密度函數:
而\(\Phi(x)\)為標準正態分佈的分佈函數:
\(EI_t(x)\)也是一個僅以x為自變數的函數,它的最大值點就是下一個取樣點。
由於\(EI_t(x)\)有公式,計算不費勁,也可以求梯度,找到它的最大值/極大值有很多種現成的方案可以做到,相比於求原目標函數\(f(x)\)的最值要簡單得多。
-
\(EI_t(x)\)推導過程
由於\(F(x)\)是正態分佈,因此可以通過其概率密度計算出期望:
\[\begin{align*} EI_t(x)&=E[[F(x)-f^*_t]^+] \\ &=\frac{1}{\sigma\sqrt{2\pi}}\int_{-\infty}^{\infty}[z-f^*_t]^+e^{-\frac{(z-\mu)^2}{2\sigma^2}}dz \\ &=\frac{1}{\sigma\sqrt{2\pi}}\int_{f_t^*}^{\infty}(z-f^*_t)e^{-\frac{(z-\mu)^2}{2\sigma^2}}dz \end{align*} \]令\(k=\frac{z-\mu}{\sigma}\)(也是把隨機變數\(F(x)\)標準化),通過換元法可以得到:
\[\begin{align*} EI_t(x)&=\frac{1}{\sigma\sqrt{2\pi}}\int_{f_t^*}^{\infty}(z-f^*_t)e^{-\frac{(z-\mu)^2}{2\sigma^2}}dz \\ &=\frac{1}{\sqrt{2\pi}}\int_{\frac{f_t^*-\mu}{\sigma}}^{\infty}(\sigma k+\mu-f^*_t)e^{-\frac{k^2}{2}}dk \\ &=\frac{\sigma}{\sqrt{2\pi}}\int_{\frac{f_t^*-\mu}{\sigma}}^{\infty}ke^{-\frac{k^2}{2}}dk+(\mu-f^*_t)(1-\frac{1}{\sqrt{2\pi}}\int_{-\infty}^{\frac{f_t^*-\mu}{\sigma}}e^{-\frac{k^2}{2}}dk) \end{align*} \]由於對\(g(x)=-e^{-\frac{x^2}{2}}\),有\(g'(x)=xe^{-\frac{x^2}{2}}\)。因此
\[\int_{\frac{f_t^*-\mu}{\sigma}}^{\infty}ke^{-\frac{k^2}{2}}dk=g(\infty)-g(\frac{f_t^*-\mu}{\sigma})=-g(\frac{f_t^*-\mu}{\sigma}) \]繼續化簡:
\[\begin{align*} EI_t(x)&=E[[F(x)-f^*_t]^+] \\ &=-\frac{\sigma}{\sqrt{2\pi}}g(\frac{f_t^*-\mu}{\sigma})+(\mu-f^*_t)(1-\Phi(\frac{f^*_t-\mu}{\sigma})) \\ &=\sigma\phi(\frac{f^*_t-\mu}{\sigma})+(\mu-f^*_t)[1-\Phi(\frac{f^*_t-\mu}{\sigma})] \\ \end{align*} \]由於\(\varphi(x)\)是偶函數,且\(\Phi(x)+\Phi(-x)=1\),則有
\[\begin{align*} EI_t(x)&=E[[F(x)-f^*_t]^+] \\ &=\sigma\phi(\frac{\mu-f^*_t}{\sigma})+(\mu-f^*_t)\Phi(\frac{\mu-f^*_t}{\sigma}) \end{align*} \]
置信區間邊界(Confidence Bound)
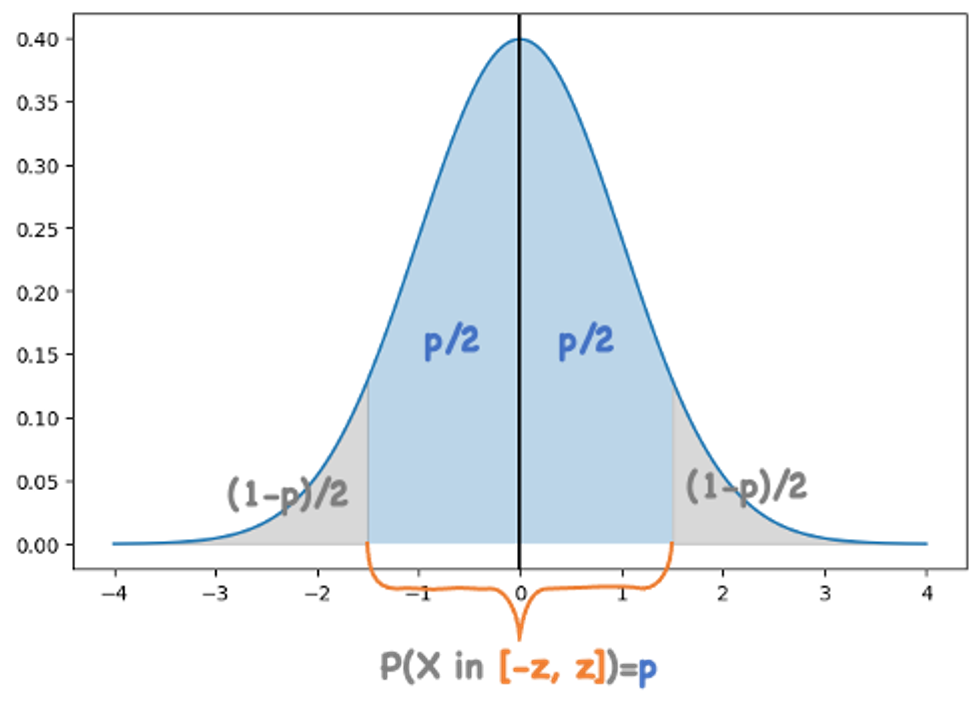
對於標準正態分佈\(X\sim N(0,1)\),給定任意關於\(x=0\)對稱的區間\([-z,z]\),可以通過對概率密度進行積分計算出一個概率p,表示符合標準正態分佈的隨機變數的值落在該區間的概率為p。
z和p是一一對應的,可以令\(z=\delta(p)\),由正態分佈的性質可知,顯然
\(\delta^{-1}(z)\)就是\(\delta(p)\)的反函數。
假設對於給定置信水平p,隨機變數\(X\)落在置信區間\([-z,z]\)的概率為p,\(z=\delta(p)\)。
由於\(F(x)\sim N(\mu,\sigma)\),它可以由標準正態分佈轉化過來:
那麼對於\(F(x)\sim N(\mu,\sigma)\),當給定置信水平p時,其置信區間就為\([-\mu-z\sigma,\mu+z\sigma]\)。
可以採用該置信區間的邊界作為採集函數。例如,在本文中我們討論最大化f(x)的優化問題,通常就會使用區間的右邊界UCB(Upper Confidence Bound):
其中z是超引數,由想要的置信水平p決定:\(z=\delta(p)\)。
UCB越大,說明在該位置有更高的可能性找到更大的值。
同理,在最小化問題中,通常就會使用區間左邊界LCB(Low Confidence Bound):
Appendix
命題1證明
【命題1】對任意\(A=[a_1,...,a_t]^T\),\(i=1,...,t\),都有\(K(x_i,x_{1:t})K(x_{1:t},x_{1:t})^{-1}A=a_i\)。
令\(K(x_i,x_{1:t})K(x_{1:t},x_{1:t})^{-1}=[z_1,...,z_t]\),那麼有
上述式子需對任意\(K(x,x’)\)都成立。列出方程組,得:
由於\(K(x_{1:t},x_{1:t})\)可以求逆,因此它是滿秩的,這意味著上面的方程組一定有唯一解。
經過變換得出:
由於右側的項都是一樣的,而左側\(K(x_i,x_j),j=1,...t\)各有不同,要想使他們相等,就必須等於0。因此解得:
故有:對任意\(A=[a_1,...,a_t]^T\),\(i=1,...,t\),都有\(K(x_i,x_{1:t})K(x_{1:t},x_{1:t})^{-1}A=a_i\)。