探索計算機的I/O控制方式:瞭解DMA控制器的作用與優勢
I/O控制方式
在前面我們已經瞭解到,每個裝置都配備了一個裝置控制器。當CPU向裝置控制器傳送命令並將其儲存在暫存器中時,裝置控制器會執行相應的操作。然而,儘管裝置控制器會更新狀態暫存器的狀態,但是如何將這些資訊傳達給CPU呢?
在裝置控制器的暫存器中,通常會有一個狀態標誌位,用於指示輸入或輸出操作是否完成。因此,我們可以考慮第一種簡單的方法,即輪詢等待的方式,讓CPU一直檢查暫存器的狀態,直到狀態標誌位被設定為完成。然而,顯然這種方式非常低效,它會佔用CPU的全部時間。
除了輪詢等待的方式,還有一種更高效的方法是採用非同步通知。這種方式需要一箇中間人來進行通知,即中斷控制器,它負責向CPU傳送中斷訊號。當裝置控制器完成操作後,會觸發中斷訊號傳送到中斷控制器,然後中斷控制器通過通知CPU來暫停當前的處理邏輯,以處理中斷。這種方式能夠有效地利用CPU的時間,提高系統的響應速度和效率。
中斷可以分為軟中斷和硬中斷兩種形式。軟中斷可以由程式或作業系統主動觸發,而硬中斷則是由硬體通過中斷控制器觸發的,例如滑鼠等外部裝置。是由硬體裝置發出的訊號,通知系統進行相應的處理。中斷的使用可以大大提高系統的並行性和響應能力,使得CPU能夠更加高效地處理多個任務。
中斷雖然是一種優化方法,但它也存在一個不足之處,就是會打斷CPU當前的工作。特別是在需要進行耗時的操作,例如從磁碟讀取資料到記憶體的IO操作,CPU會被佔用大量的時間,導致無法同時處理其他任務。對於這種情況,我們可以藉助DMA(直接記憶體存取)控制器來解決這個問題。
DMA控制器是在學習Java零拷貝技術時經常提到的一個概念。它的作用是讓裝置在沒有CPU參與的情況下,能夠自行將裝置的輸入/輸出資料傳輸到記憶體中。要實現DMA功能,需要有硬體上的支援,即DMA控制器。那麼我們來看看DMA是如何幫CPU解決問題的。
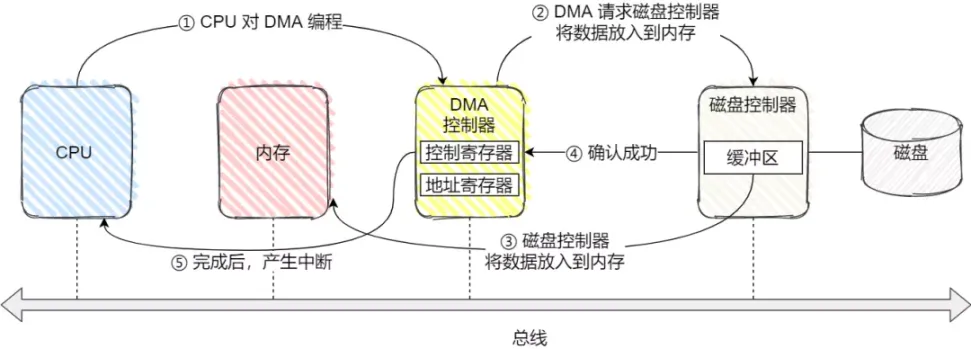
DMA 的工作方式如下:
首先,CPU向DMA控制器傳送指令,告知需要讀取的內容以及儲存資料的記憶體地址。
接著,DMA控制器代替CPU與磁碟控制器通訊,向磁碟控制器傳送讀取資料的命令。當磁碟控制器將資料緩衝區填滿後,它會將資料傳輸到指定的記憶體地址。
一旦磁碟控制器完成將資料傳輸到記憶體的操作,它會通過匯流排向DMA控制器傳送一個確認成功的訊號。
當DMA控制器接收到確認訊號後,它會傳送中斷通知給CPU,告知資料傳輸已經完成。
此時,CPU可以直接從記憶體中讀取資料,而無需額外的操作。可以看出,在CPU需要讀取磁碟資料時,只需向DMA控制器傳送指令,然後CPU可以繼續執行其他任務。當磁碟資料被拷貝到記憶體後,DMA控制器通過中斷的方式通知CPU資料已經準備就緒,可以直接從記憶體中讀取。因此,除了在傳輸開始和結束時需要CPU的干預外,CPU的參與度較低。這樣可以極大地提高系統的並行性和響應能力。
有人可能會質疑:為什麼DMA的效率比中斷高呢?磁碟控制器完成讀取後只需向CPU傳送一箇中斷,DMA完成後也需要傳送一箇中斷,所以它們不是一樣的嗎?只是DMA直接將資料讀取到記憶體中了?
其實中斷方式的控制模式是這樣的:硬體每準備好一段資料(存放在自己的內部緩衝區中),就向CPU傳送一箇中斷訊號;CPU接收到中斷訊號後,會停止當前的工作,並將硬體緩衝區的每個字元逐個讀取到自己的暫存器中,然後將每個字元逐個寫入記憶體。之後,其他應用可以通過系統呼叫將記憶體中的資料取出進行進一步處理。
而DMA方式是這樣的:硬體先準備好若干資料,並將其存放在自己的緩衝區(比如網路卡板載的記憶體晶片)。然後,硬體向CPU傳送一箇中斷訊號,表示有一定量的資料要提交。CPU發現硬體支援DMA,就向硬體傳送通知——將資料存放在記憶體的特定地址範圍內,然後讓硬體自行處理。
之後,CPU不再理會這個硬體,而是讓硬體通過自己線路板上的簡單處理器,逐個位元組地將緩衝區中的資料寫入指定的記憶體位置。需要注意的是,在DMA方式下,記憶體的內容是由硬體自己維護的,CPU不再參與。這樣,當硬體自行搬運緩衝區資料時,CPU可以繼續處理自己的任務,提高了系統的並行性和響應能力。
裝置驅動程式
儘管裝置控制器遮蔽了裝置的諸多細節,但每種裝置控制器都具有獨特的暫存器、緩衝區等使用模式。因此,為了有效遮蔽裝置控制器之間的差異,作業系統引入了裝置驅動程式。通過裝置驅動程式,作業系統能夠統一管理不同裝置控制器的操作,使其在各種裝置上都能正常工作。
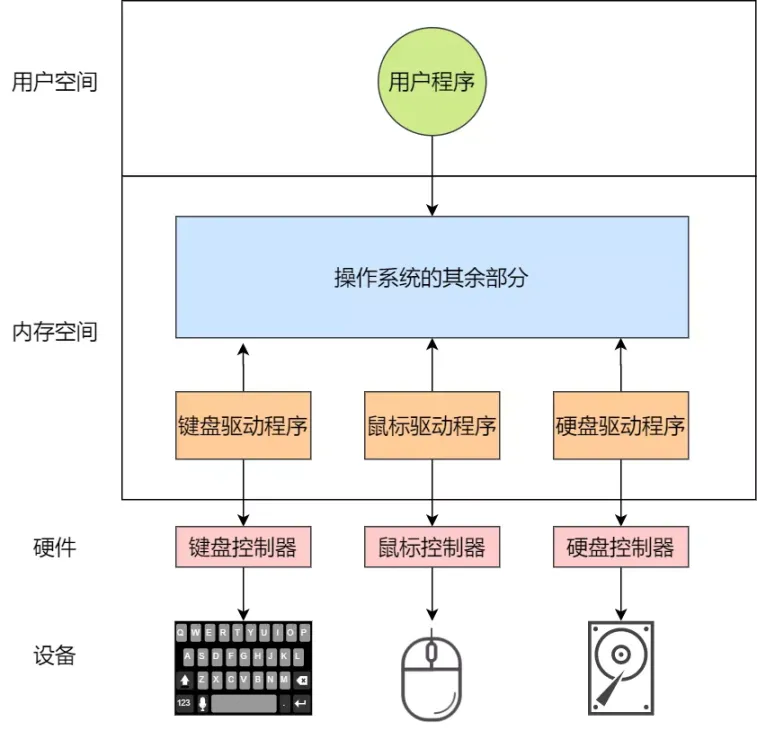
裝置控制器作為硬體的一部分,並不屬於作業系統的範疇。然而,裝置驅動程式則是作業系統的一部分,它提供了一個介面,使得作業系統的核心程式碼可以像本地呼叫程式碼一樣使用裝置驅動程式。裝置驅動程式是專門針對裝置控制器編寫的程式碼,它發出指令來操作裝置控制器,從而實現對裝置的操控。通過裝置驅動程式,作業系統能夠與裝置控制器進行有效的通訊,並實現對裝置的控制和管理。
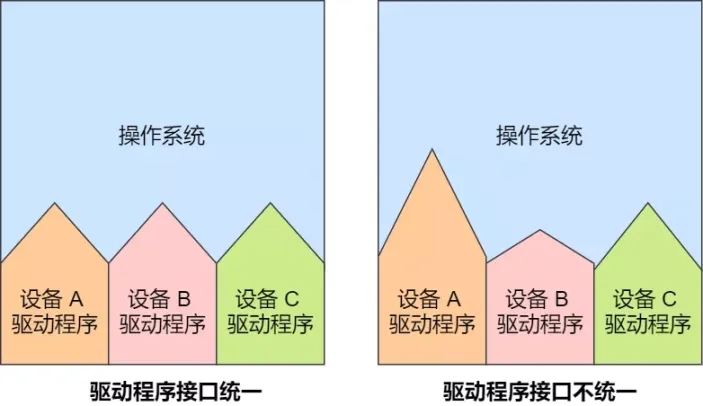
儘管不同的裝置控制器具有不同的功能,但裝置驅動程式會提供一個統一的介面給作業系統,這樣不同的裝置驅動程式就可以以相同的方式接入作業系統。下圖展示:
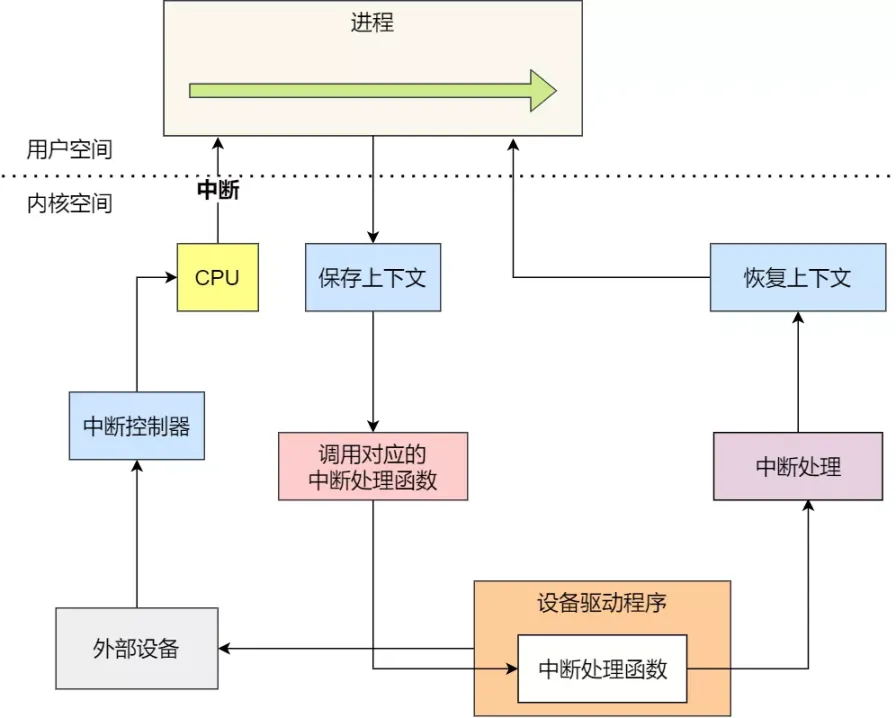
在前面的討論中,我們提到了中斷的重要性。當裝置完成了任務時,它會傳送一箇中斷訊號來通知作業系統。作業系統需要有一個地方來處理這個中斷,而這個地方就是裝置驅動程式。裝置驅動程式會及時響應控制器發來的中斷請求,並根據中斷的型別呼叫相應的中斷處理程式來進行處理。
當裝置驅動程式初始化時,通常會註冊一個與該裝置相關的中斷處理常式。中斷處理程式的處理流程如下:當裝置控制器觸發中斷並通知中斷控制器後,中斷控制器會向CPU發出中斷請求,CPU會停止當前程序的執行並儲存當前程序的上下文。接著,CPU會呼叫相應的中斷處理常式來處理該中斷。中斷處理常式完成後,CPU會恢復之前儲存的程序上下文,並繼續執行被中斷的程序。
總結
在本文中,我們總結了關於I/O控制方式的內容。首先,我們介紹了輪詢等待和非同步通知兩種基本的I/O控制方式。輪詢等待方式效率低下,會佔用CPU的全部時間,而非同步通知方式通過中斷控制器來通知CPU,能夠有效提高系統的響應速度和效率。
接著,我們介紹了中斷的使用和分類。中斷可以分為軟中斷和硬中斷兩種形式,它們能夠大大提高系統的並行性和響應能力。然而,中斷也存在一個問題,即會打斷CPU當前的工作,導致無法同時處理其他任務。
為了解決這個問題,我們引入了DMA(直接記憶體存取)控制器。DMA控制器能夠讓裝置在沒有CPU參與的情況下,自行將裝置的輸入/輸出資料傳輸到記憶體中,從而減少CPU的參與度,提高系統的並行性和響應能力。
最後,我們介紹了裝置驅動程式的作用和重要性。裝置驅動程式是作業系統的一部分,它提供了一個介面,使得作業系統能夠統一管理不同裝置控制器的操作。裝置驅動程式還負責處理裝置觸發的中斷請求,並呼叫相應的中斷處理程式來進行處理。