VINS中的重力-尺度-速度初始化(2)
2023-09-05 18:00:43
VINS中的重力-尺度-速度初始化(2)
細化重力
\(\quad\)上一篇文章中得到的 \(g\) 一般是存在誤差的。因為在實際應用中,當地的重力向量的模一般是已知固定大小的(所以只有兩個自由度未知),而我們在前面求解時並沒有利用這個條件,因此最後計算出來的重力向量很難剛好滿足這個條件。於是,在vins的初始化中,還會對得到的重力向量進行修正。
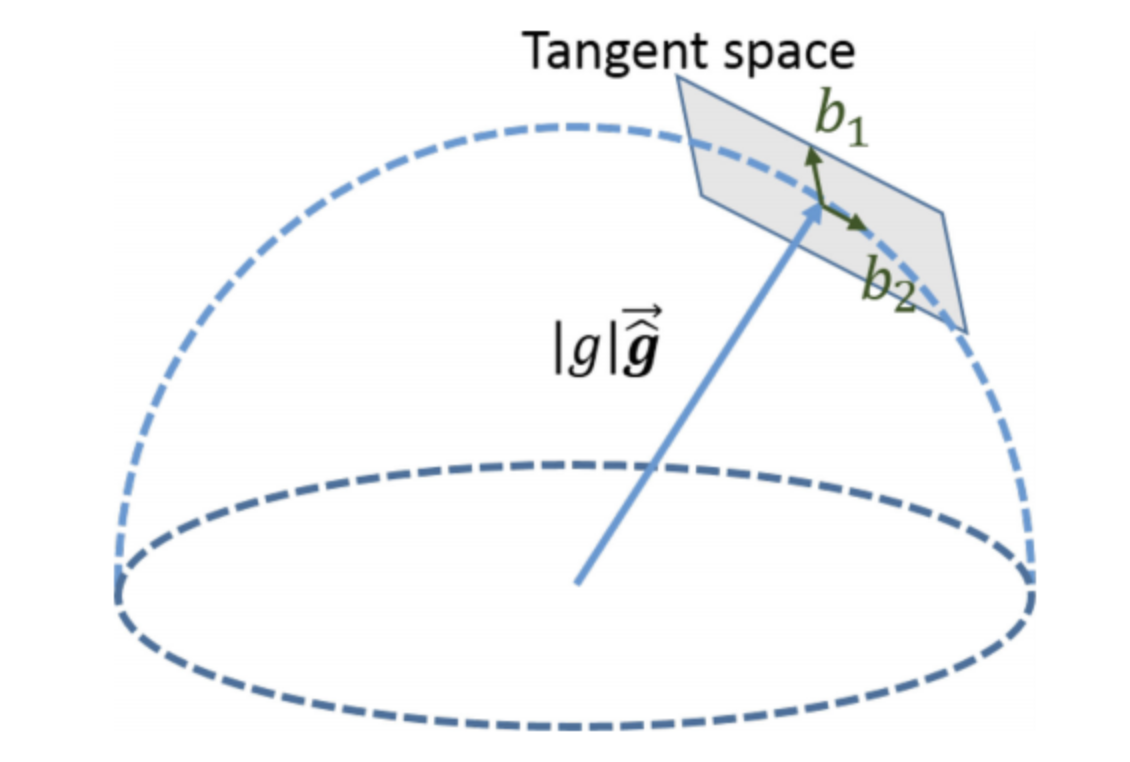
\(\quad\)首先,作者對重力向量進行引數化:
\[\hat{g}=\|g\| \overline{\hat{g}}+w_{1} b_{1}+w_{2} b_{2}=\|g\| \overline{\hat{g}}+\vec{b}^{3 \times 2} w^{2 \times 1}
\]
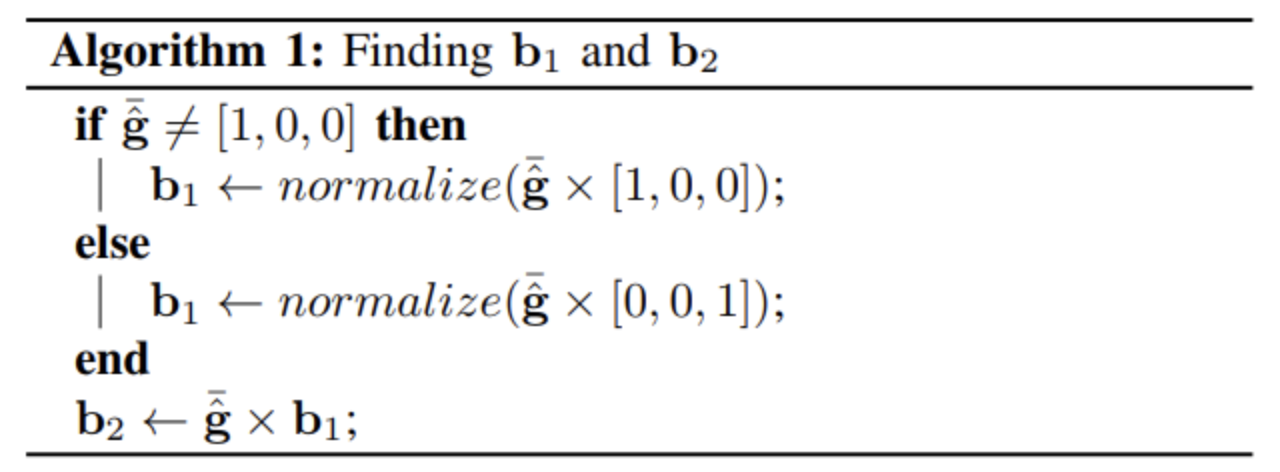
其中,\(\overline{\hat{g}}\)是上一步中估計得到的重力向量方向的單位向量,\(b_1\)與\(b_2\)是另外兩個單位向量,是\(\overline{\hat{g}}\)切平面上的兩個互相垂直的單位向量,獲得方式如下:
此時我們可以從上面的式子知道,原本三維的優化變數 \(g^{c 0}\) 已經可以使用兩維的 \(w^{2 \times 1}\) 替代。參考上一節的推導,待優化變數變成了
\[\left[\begin{array}{c}
v_{b_{k}}^{b_{k}} \\
v_{b_{k+1}}^{b_{k+1}} \\
w^{2 \times 1} \\
s
\end{array}\right]
\]
最後得到的觀測方程也變為了
\[\left[\begin{array}{cccc}
-I \Delta t_{k} & 0 & \frac{1}{2} R_{c_{0}}^{b_{k}} \Delta t_{k}^{2} \vec{b} & R_{c_{0}}^{b_{k}}\left(p_{c_{k+1}}^{c_{0}}-p_{c_{k}}^{c_{0}}\right) \\
-I & R_{c_{0}}^{b_{k}} R_{b_{k+1}}^{c_{0}} & R_{c_{0}}^{b_{k}} \Delta t_{k} \vec{b} & 0
\end{array}\right]\left[\begin{array}{c}
v_{b_{k}}^{b_{k}} \\
v_{b_{k+1}}^{b_{k+1}} \\
w \\
s
\end{array}\right]=\left[\begin{array}{c}
\alpha_{b_{k+1}}^{b_{k}}+R_{c_{0}}^{b_{k}} R_{b_{k+1}}^{c_{0}} p_{c}^{b}-p_{c}^{b}-\frac{1}{2} R_{c_{0}}^{b_{c}} \Delta t_{k}^{2}\|g\| \hat{\hat{g}} \\
\beta_{b_{k+1}}^{b_{k}}-R_{c_{0}}^{b_{k}} \Delta t_{k}\|g\| \hat{g}
\end{array}\right]
\]
基於新得到的觀測方程(可以使用LDLT分解求解),我們可以通過重力約束不斷地對初始化結果進行修正,迭代對其 進行求解(vins中迭代了4次),最後得到一個修正後的初始化結果。
與世界座標系對齊
這一步一般是最後一步,一般世界座標系選擇的是東北天座標系。則這個對齊操作就是得到將重力向量旋轉到Z軸上的旋轉矩陣,這個旋轉矩陣就是將原本座標變換到世界座標系(東北天座標系)的變換矩陣。
找到這個變換矩陣後,接下來就是使用這個變換矩陣將位姿,速度等狀態資訊都變換到世界座標系下。
加速度計bias
通過上面的閱讀,我們會發現在vins的初始化中並沒有對加速度計的bias進行估計,感覺對於超定的方程,多計算一個加速度計的bias好像也不是什麼難事,,而且建模應該會更準確。在這個初始化工作的論文中其實有解釋原因:
- 通過模擬實驗證明,如果運動不劇烈,加速度計的bias很難被觀測出來;
- 忽略加速計的bias對估計其他初始值的影響不大;
- 加速度計的bias是可以通過之後的VIO緊耦合優化,慢慢估計出來的;
參考資料
- [1] https://github.com/HKUST-Aerial-Robotics/VINS-Mono
- [2] VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator, Tong Qin, Peiliang Li, Zhenfei Yang, Shaojie Shen, IEEE Transactions on Robotics
- [3] https://mp.weixin.qq.com/s/9twYJMOE8oydAzqND0UmFw
- [4] https://xhy3054.github.io/