ATtiny88初體驗(四):看門狗
2023-08-25 18:01:28
ATtiny88初體驗(四):看門狗
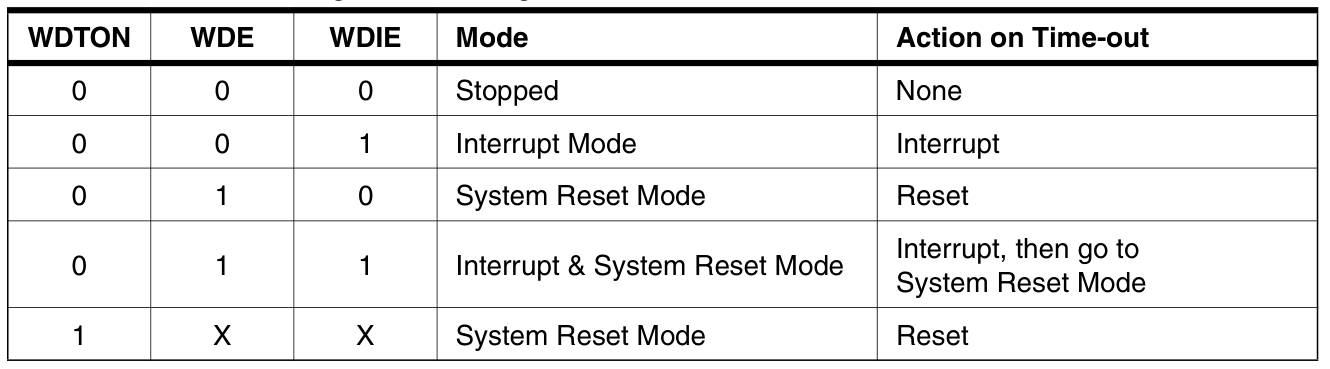
ATtiny88微控制器的看門狗使用內部獨立的128KHz時鐘源,擁有3種工作模式:
- Interrupt模式:超時產生中斷;
- System Reset模式:超時產生系統復位;
- Interrupt & System Reset模式:超時產生中斷,中斷處理完成後產生系統復位。
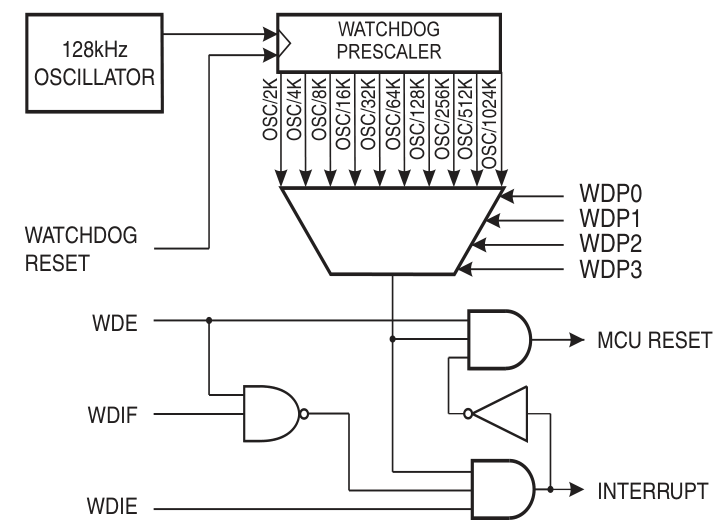
當熔絲位 WDTON 被程式設計時(值為0),將強制將看門狗設為System Reset模式,此時 WDE 和 WDIE 位將被鎖定為 1 和 0 。
清除 WDE 位和修改 WDP 需要按照下面的順序進行操作:
- 向
WDCE和WDE位寫1,不管WDE位先前是什麼值,都必須寫1。 - 在接下來的4個時鐘裡,修改
WDE和WDP位,清除WDCE位,這些必須在一次操作內完成。
注意:
- 為了防止程式陷入復位迴圈,不管有沒有用到看門狗,在初始化時,都建議清除
WDRF標誌位和WDE位。 - 在任何對
WDP位的修改之前,建議都復位看門狗,否則可能會導致意外的復位。
暫存器

WDRF:看門狗系統復位標誌位。BORF:欠壓復位標誌位。EXTRF:外部復位標誌位。PORF:上電覆位標誌位。

WDIF:看門狗中斷標誌位。WDIE:看門狗中斷使能。WDCE:看門狗修改使能,只有設定此位,才能修改WDE和WDP位。WDE:看門狗系統復位使能。
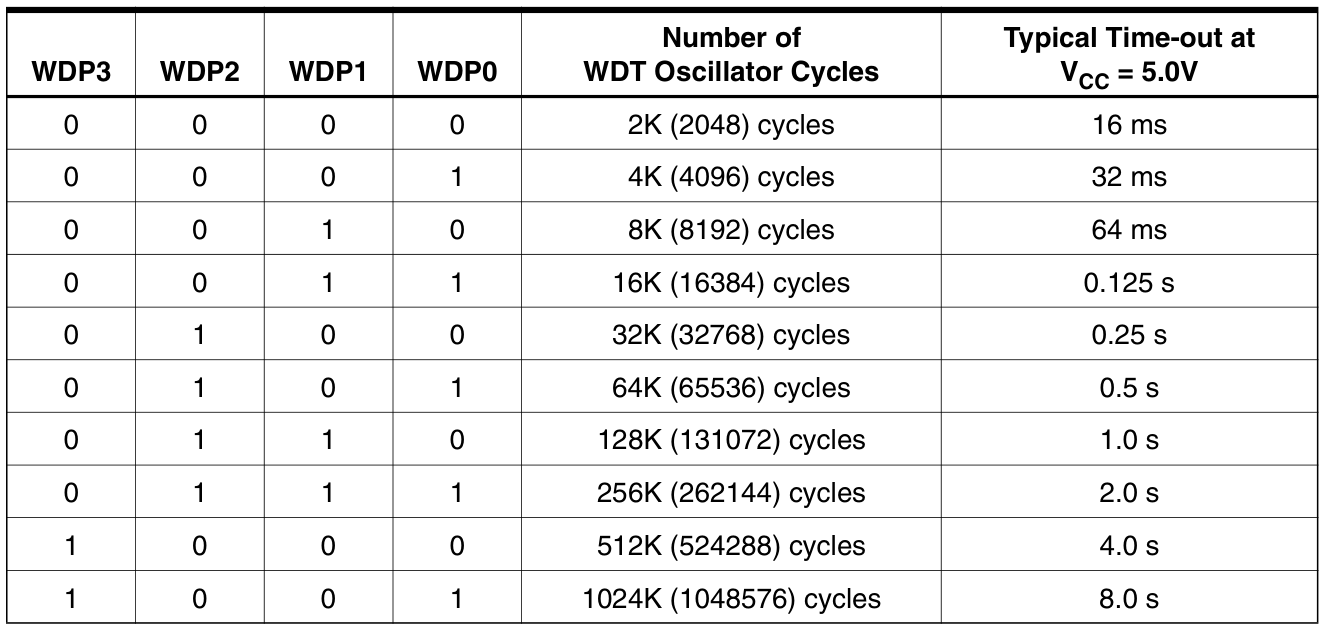
WDP[3:0]:看門狗定時器分頻。
程式碼
程式碼的檔案結構如下:
.
├── Makefile
├── inc
│ ├── serial.h
│ └── serial_stdio.h
└── src
├── main.c
├── serial.c
└── serial_stdio.c
其中, src/main.c 的內容如下:
#include <stdint.h>
#include <stdio.h>
#include <avr/io.h>
#include <avr/interrupt.h>
#include <avr/wdt.h>
#include <serial_stdio.h>
static void watchdog_setup(void);
int main(void)
{
cli();
DDRD = _BV(DDD0); // set PD0 as output
stdio_setup(); // initialize stdio
sei();
if (MCUSR & _BV(WDRF)) { // check if watchdog reset
printf("Watchdog Reset.\r\n");
}
if (MCUSR & _BV(BORF)) { // check if brown-out reset
printf("Brown-out Reset.\r\n");
}
if (MCUSR & _BV(EXTRF)) { // check if external reset
printf("External Reset.\r\n");
}
if (MCUSR & _BV(PORF)) { // check if power-on reset
printf("Power-on Reset.\r\n");
}
MCUSR = 0; // clear reset flags
watchdog_setup(); // initialize watchdog as timer
for (;;);
}
static void watchdog_setup(void)
{
cli();
wdt_reset(); // reset watchdog counter
MCUSR &= ~_BV(WDRF); // clear watchdog reset flag
WDTCSR = _BV(WDCE) | _BV(WDE); // enable watchdog change
WDTCSR = _BV(WDIE) | _BV(WDP2) | _BV(WDP0); // interrupt mode, 0.5s
sei();
}
ISR(WDT_vect)
{
uint8_t sreg = SREG;
PIND = _BV(PIND0); // toggle PD0
SREG = sreg;
}
上述程式碼將看門狗設定為定時器中斷模式,定時週期為0.5s,在中斷程式裡,翻轉PD0的輸出狀態。
參考資料
本文來自部落格園,作者:chinjinyu,轉載請註明原文連結:https://www.cnblogs.com/chinjinyu/p/17657078.html