ARHUD駕車導航技術概覽

ARHUD (Augmented Reality Head Up Display),即擴增實境與擡頭顯示的結合,是一種將渲染元素投影在真實世界的技術,也是目前使用者理解成本最低的展示方式。
HUD功能第一次應用是在二戰中,被應用在槍械和戰鬥機上,80年代初期開始轉向民用,90年代初期技術概念被正式提出,並被演變成為汽車上的功能。其實,汽車上還有很多軍用轉民用的設定,例如慣導裝置。
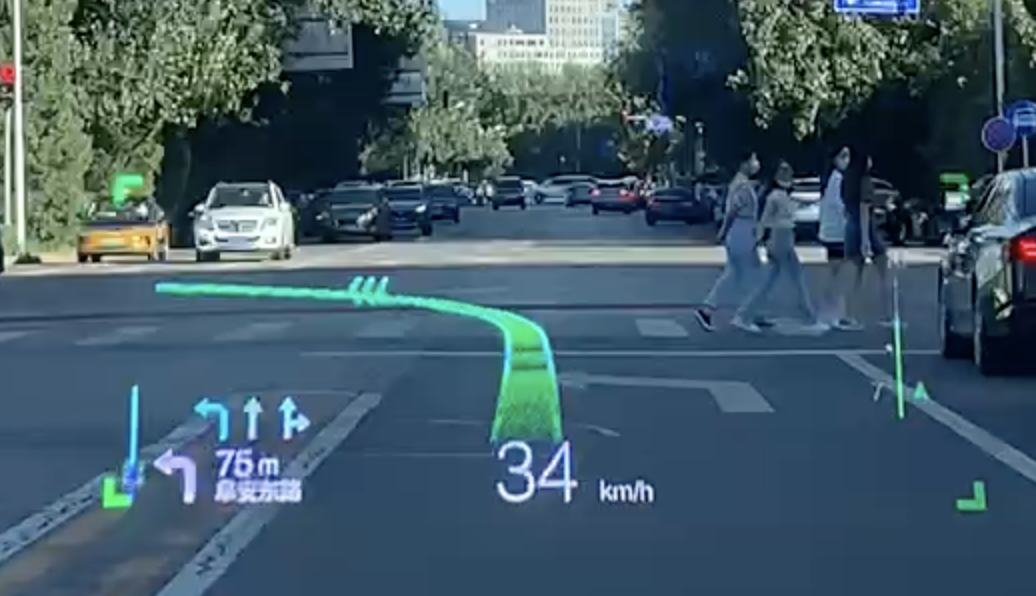
ARHUD駕車導航,就是把車速限速、轉向動作、引導線等重要的導航資訊,投影到駕駛員視野正前方 ,讓駕駛員儘量做到不低頭、不轉頭就能看駕駛引導資訊。
高德在ARHUD駕車導航方面做了大量研發工作並擁有業界領先的技術儲備和實踐經驗,在2022年8月,高德地圖與北汽、華為合作,推出北汽魔方ARHUD導航。
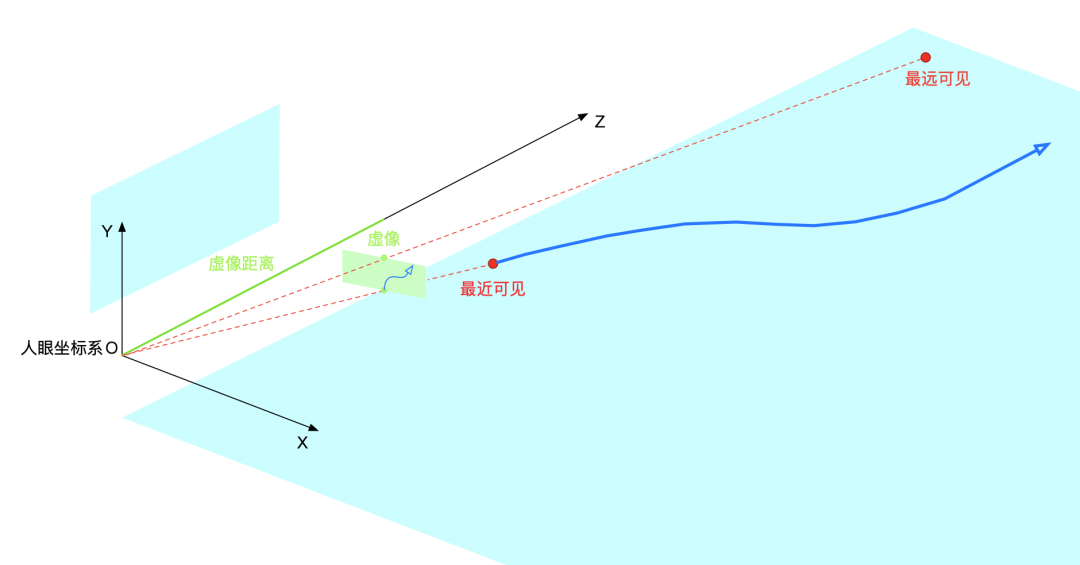
1.虛像距離(Virtual Image Distance)

虛像距離,Virtual Image Distance,簡稱VID,簡單點說就是虛像到人眼的視覺距離 ,大家都知道人的眼睛也是有焦距的,看遠和看近的焦距不同,因此如果VID的距離不夠遠,在看向較遠的地方時ARHUD的顯示會由於眼睛焦距的原因而虛化。
傳統HUD的VID距離也就是在2.5米左右,而AR HUD的VID距離往往在10米以上,要做到跨車道顯示的話,需要投影距離達到20米才行。
傳統W-HUD其實可以理解為一個投影儀,將影象反射,投影到了擋風玻璃上(例如手機高德地圖的HUD投影功能),實際上相當於把原本顯示在儀表盤上的資訊,投射到擋風玻璃上。其實這也是HUD設計的初衷——駕駛員不需要低頭即可獲得車輛行駛的相關資訊。
但是W-HUD的影象尺寸有限(通常投影距離3m,顯示尺寸15-20寸),能顯示的資訊較少,且影象不會與道路融合,駕駛員仍然需要將視線從路面上移開,重新對焦才能獲得資訊,這實際上違背了HUD的設計初衷。
2.視場角(Field Of View)
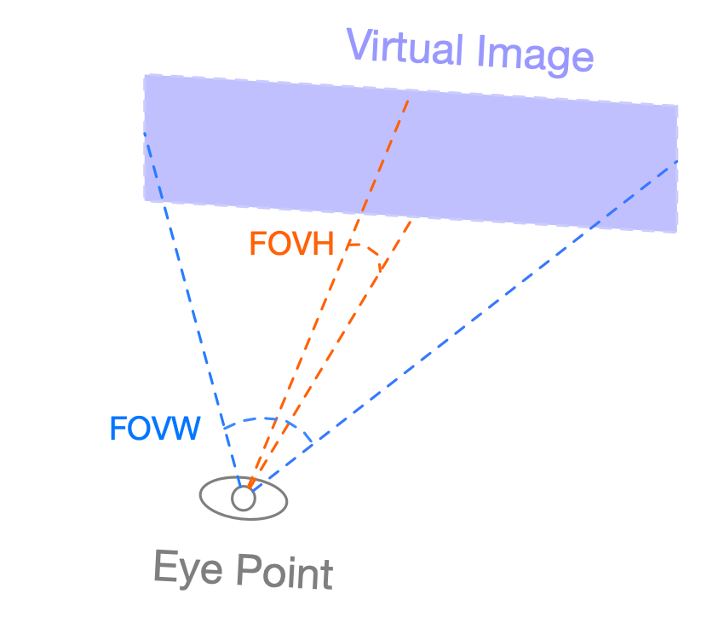
視場角,Field Of View,簡稱FOV,視場角包括了以駕駛員眼睛為中心的水平視場角和垂直視場角。 傳統HUD的FOV很小,一般只有5度。而AR HUD的水平視場角要在10°以上,理想ONE的ARHUD能夠達到20°,問界M5的ARHUD也能夠達到13°。
3.人眼位置(Eye Point)
人眼座標(x, y, z),相對於車體座標系的位置,以車頭中心為座標原點,單位 米。
人眼座標會隨著駕駛者的高矮、坐姿、頭部位置移動而動態調整。


4.虛像旋轉角度(三自由度)
4.1. 沿X軸旋轉角度(LDA、下視角)

4.2. 沿Y軸旋轉角度(橫滾角)

4.3. 沿Z軸旋轉角度(朝向角)
5.虛像座標轉換(世界座標轉虛像座標)
首先,看一下在相機投影中,世界座標 轉 畫素座標。
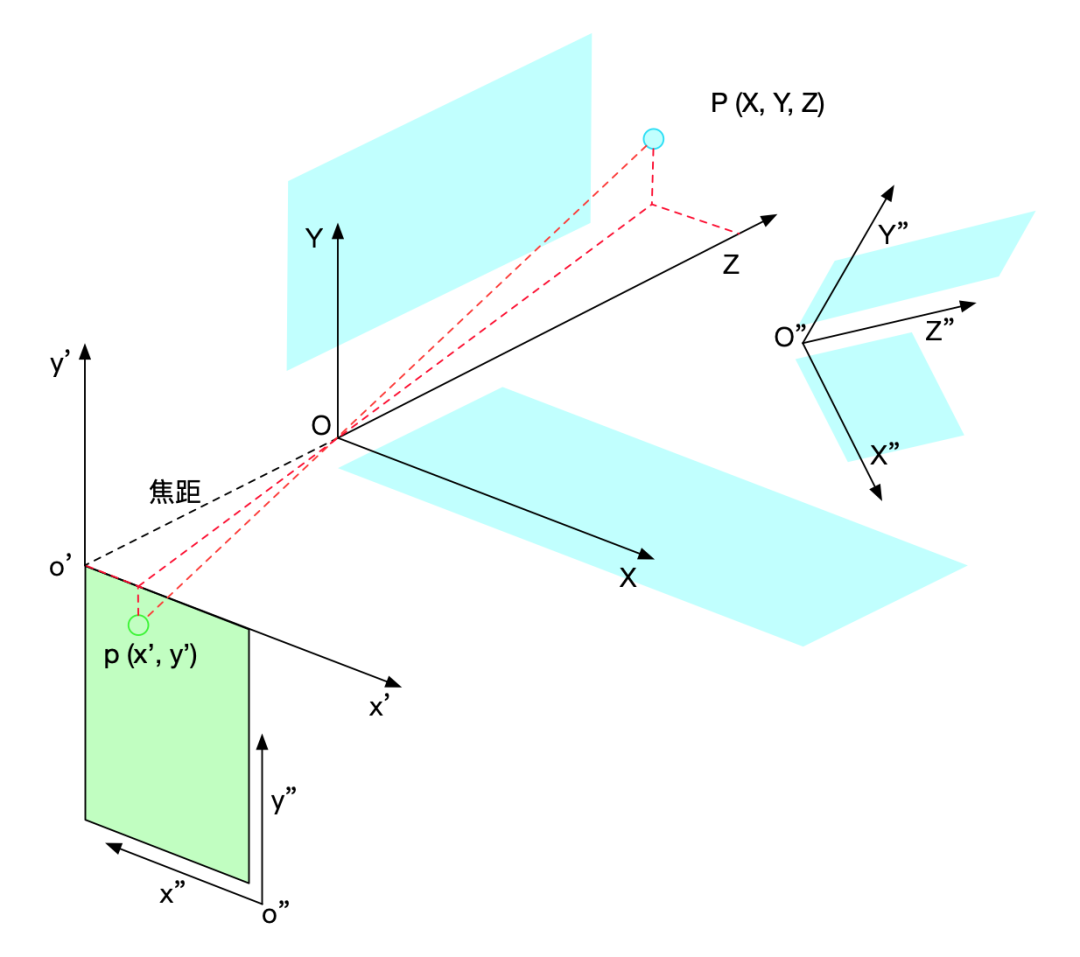
然後,看一下在HUD投影中,世界座標 轉 虛像座標(單位也是畫素)。
在已知 虛像距離、視場角、人眼位置、虛像角度 的前提下,就可以進行 世界座標 與 虛像座標 的互相轉換。

通過對比相機投影 和 HUD投影 可以發現,相機投影中的焦距 與 HUD投影中的虛像距離 有著緊密聯絡。
人的眼睛也是有焦距的,看遠和看近的焦距不同,因此如果虛像距離不夠遠,在看向較遠的地方時ARHUD的顯示會由於眼睛焦距的原因而虛化。
所以,虛像距離 聯絡著 人眼的焦距。
如果虛像距離過小,駕駛員需要將視線從路面上移開,重新對焦才能看清HUD上的資訊,這實際上違背了HUD的設計初衷。
6.座標轉換的應用
6.1. 驗證虛像投影是否準確
面臨問題 :虛像投影主要目的是將真實世界座標投影在虛像中,如果無法做到準確對應,會影響ARHUD準確性。
解決方法 :由硬體系統方傳入投影引數——虛像距離、視場角、人眼位置、虛像解析度、虛像角度,計算出投影矩陣,通過該矩陣可進行 虛像座標 與 車體世界座標 的轉換。
取虛像上幾個具有代表性的畫素座標(一般是九個點),轉換成車體世界座標,即可計算出虛像可視範圍——最遠可見、最近可見、最左可見、最右可見、中心可見。
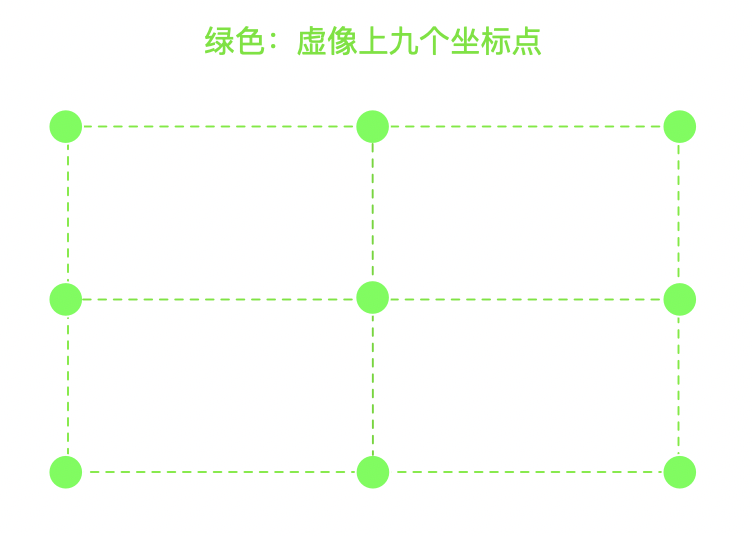
在計算出的可視範圍上放置標識物體(車前方),檢視該標識物體在虛像中的位置,是否與九個點重合,如果重合則代表投影準確,如果不重合則投影誤差較大,需要通知硬體系統方進行調整。
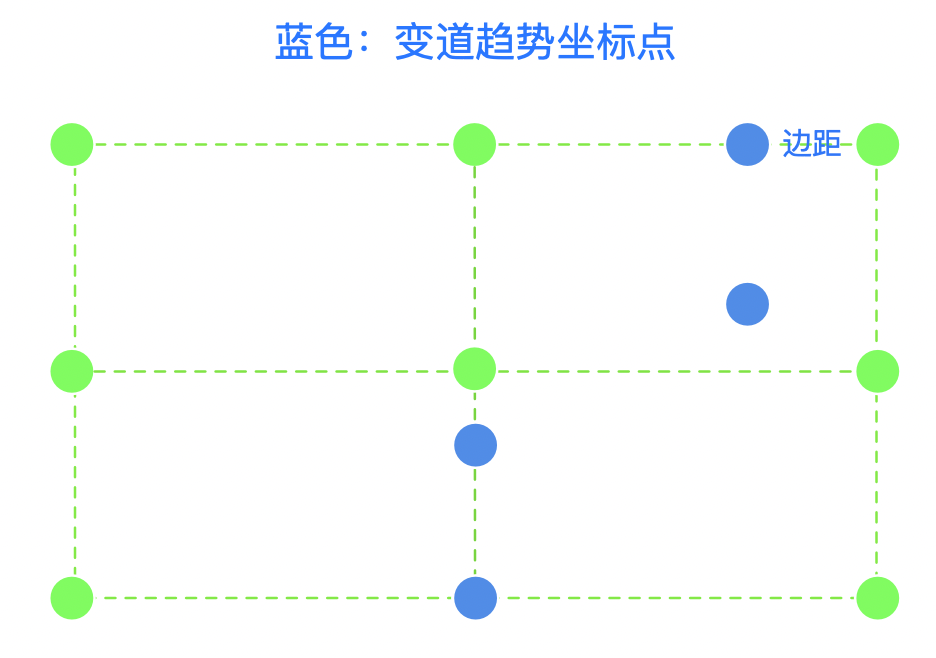
6.2. 解決變道引導線超出虛像顯示區
面臨問題 :AR導航中的變道引導線是貼合真實世界指向相鄰應行駛車道的,如果虛像可視範圍無法覆蓋相鄰車道,則會導致變道線超出顯示區。
解決方法 :根據變道資訊(向左變道、向右變道、變到幾車道),在虛像上取幾個趨勢性畫素座標,轉換成 車體世界座標,最終投影出來。因為是在虛像上取的座標,所以始終不會超出虛像顯示區域。
7.ARHUD 硬體技術
7.1. TFT
即TFT-LCD,其原理是LED發出的光透過液晶單元后將螢幕上的資訊投射出去。
優點 :該方案是業界最早開發的投影方案,方案成熟,相對成本低。(目前國外供應商能做到2500-3000左右,本土供應商能做到2000左右。隨著技術的成熟和相關產業鏈的發展,成本應該可以進一步做到2000以內)。
缺點 :陽光倒灌問題難以解決。亮度不夠,在白天顯示效果較差。

7.2. DLP
即Digital Light Processing的縮寫,採用TI的DMD晶片,把影像訊號經過數位處理再投射出來。
優點 :DMD晶片可確保投影的活動影像色彩豔麗、細膩逼真、自然真實。由於經過數位化處理,可將影象中的缺陷抹去。DMD晶片更小、更易於攜帶。
缺點 :造價更貴(成本在5000元以上)。
DLP可能出現彩虹效應,影像訊號在數位處理過程中顏色混合及轉換異常。
DLP顯示屏由於需要採用TI的DMD晶片,涉及到技術專利,因此只有賓士和傳祺兩家車型在用。

7.3. LCOS
即Liquid Crystal on Silicon的縮寫,即液晶附矽,也叫矽基液晶,是一種基於反射模式,尺寸比較小的矩陣液晶顯示裝置。這種矩陣採用CMOS技術在矽晶片上加工製作而成。目前國內主要是華為跟一數科技採用這種方案。
優點 :在整體反射模式下,光利用效率高,畫面更加自然。價格可控,CMOS技術由多家廠商掌握,避免DMD晶片只由德州儀器獨家壟斷的情況。反光層和矽基板電路之間具有一層金屬遮光層,可以有效防止陽光倒灌。
缺點 :目前整體技術還不太成熟,沒有大規模量產,有待進一步發展。HUD可視區域較小,投影光機體積相對較大。

8.ARHUD主要技術難點
- 市場角小
目前市面上的ARHUD裝置FOV過小,影像只能呈現在駕駛者視線範圍中的一小部分。
- 投影亮度
HUD影像的亮度,為了對應不同的外部光線、氣候等影響,需要更高的亮度來達到較佳的影像品質與視覺效果。
- 硬體體積
降低HUD的系統整體體積,現有TFT/DLP等模組本身的限制,加上需求較大的FOV,都會讓HUD系統的體積越來越大,與車體的空間分配衝突。
- 實景貼合
需要通過各種路網資料、感測器資料、GPS訊號等,進行實時矯正。確保AR的圖形和真實路況匹配。
- 人眼位置
如何動態監測人眼位置,調整ARHUD投射的畫面,使之避免出現畫面發虛、錯位等問題,比較考驗HUD廠商的能力。
結語
ARHUD技術發展至今,已成為駕車導航產業必爭之地。可以預期的是,蘋果公司的ARHUD在未來也會逐漸向駕車導航靠攏。當然,還有很多技術難點需要攻克,來提升使用者體驗,真正實現 導航視野內「所見即所得」。值得欣慰的是,在ARHUD技術迅猛發展過程中,見到了很多國內企業努力的身影。希望未來有更多中國技術在ARHUD領域大放異彩!
注:文中部分配圖來自網路,如有侵權,請聯絡我們刪除。