Gazebo、Rviz 結合 ORB-SLAM3 實現運動規劃及定位
2023-06-17 12:00:35
基於以下內容,詳見部落格連結
參考連結
成果圖

STEP1: 安裝攝像頭驅動
(1)筆電攝像頭
sudo apt-get install ros-melodic-uvc-camera
(2)USB攝像頭
sudo apt-get install ros-melodic-usb-cam
STEP2: 安裝image相關功能包
sudo apt-get install ros-melodic-image-*
sudo apt-get install ros-melodic-rqt-image-view
STEP3: 啟動 gazebo 模擬環境
source ./devel/setup.bash
roslaunch mycar environment.launch


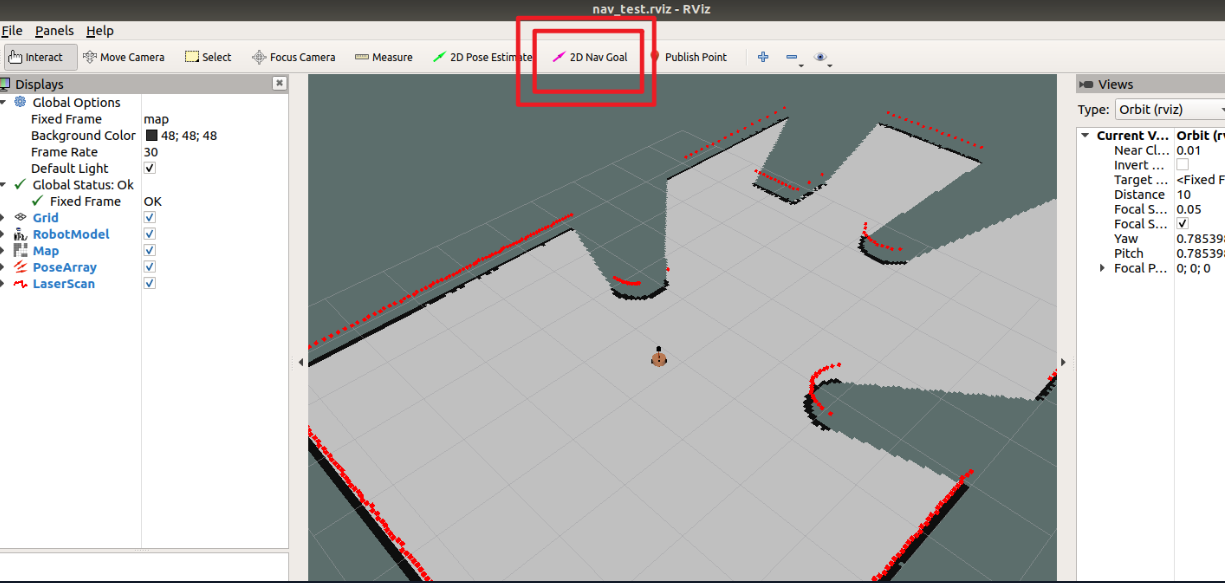
STEP4: 啟動 rviz 相關節點
source ./devel/setup.bash
roslaunch nav_demo nav07_slam_auto.launch


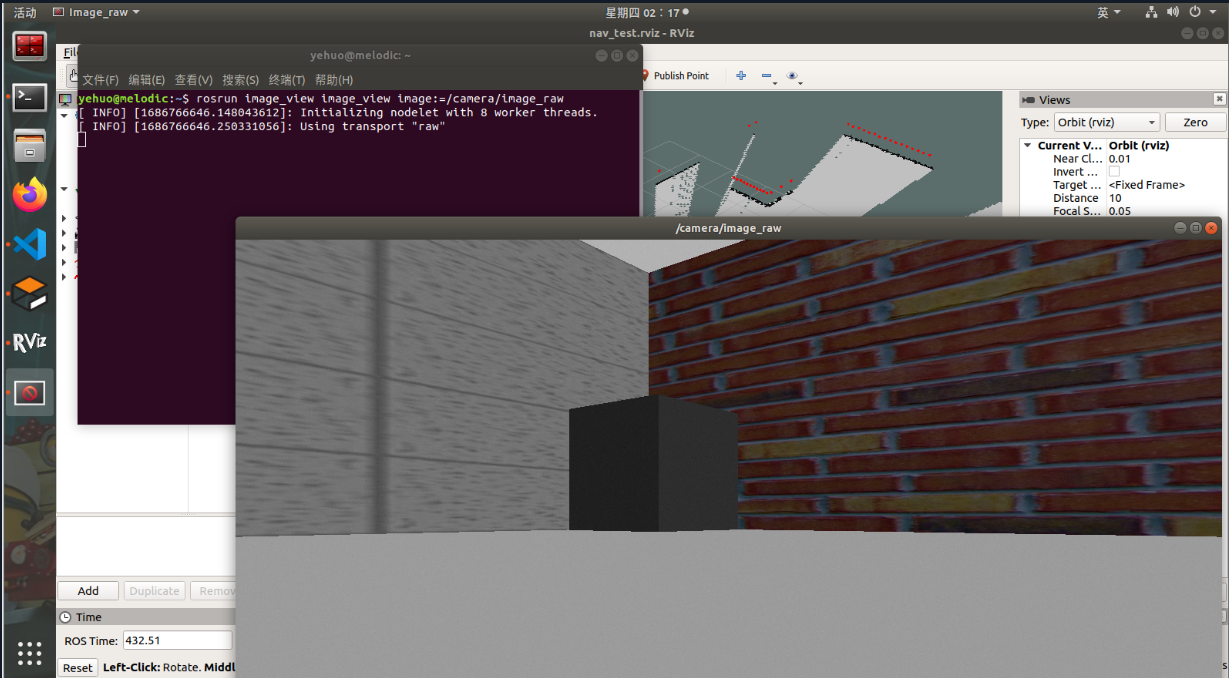
STEP5: 啟動相機節點
rosrun image_view image_view image:=/camera/image_raw
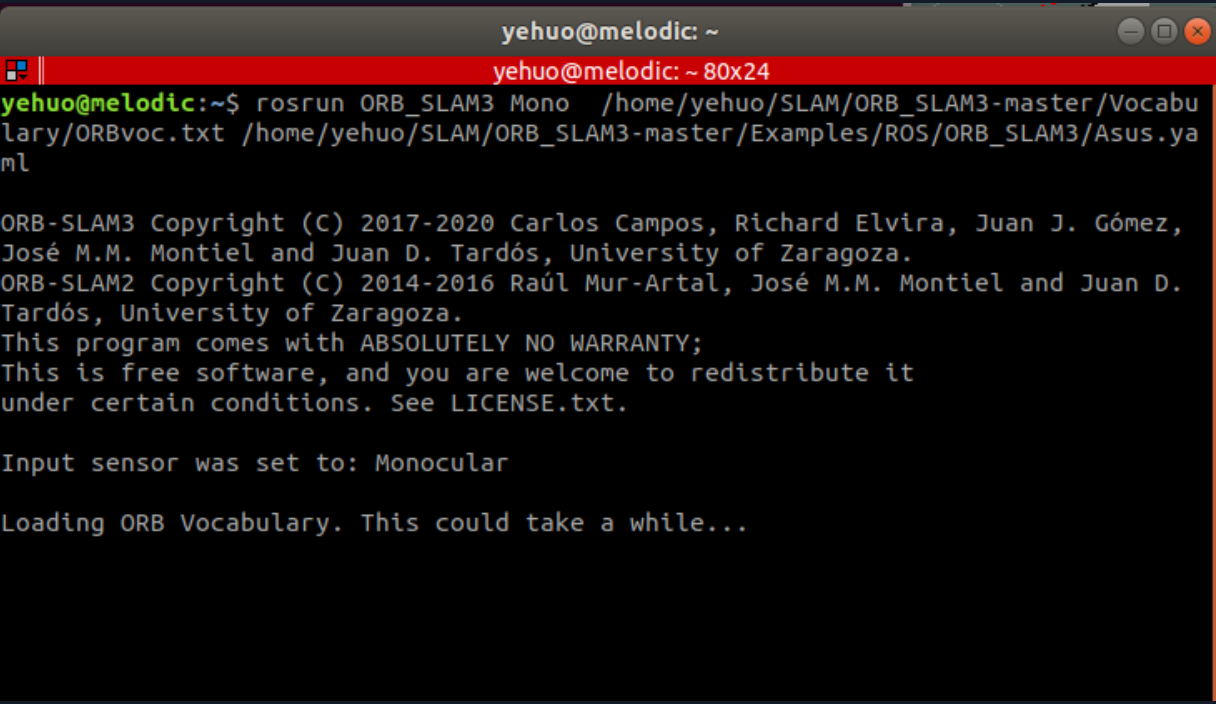
STEP6: 啟動 ORB-SLAM3
rosrun ORB_SLAM3 Mono /home/yehuo/SLAM/ORB_SLAM3-master/Vocabulary/ORBvoc.txt /home/yehuo/SLAM/ORB_SLAM3-master/Examples/ROS/ORB_SLAM3/Asus.yaml

STEP7: 測試
測試小車運動規劃以及定位功能