Perceptron, Support Vector Machine and Dual Optimization Problem (3)
Support Vector Machines
Perceptron and Linear Separability
假設存在一個 linear decision boundary,它可以完美地對 training dataset 進行分割。 那麼,經由上述 Perceptron Algorithm 計算,它將返回哪一條 linear separator?
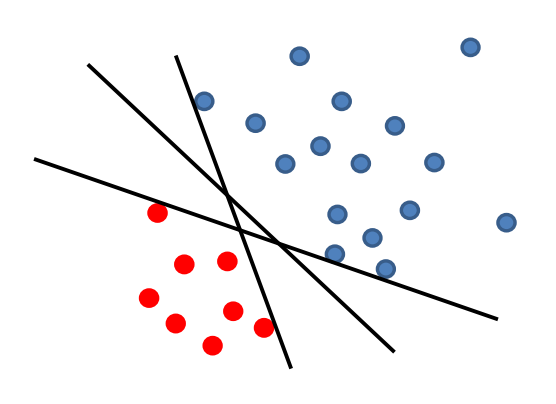
當 linear separator(即一個給定的超平面)的 margin \(\gamma\) 越大,則該模型的歸納與概括的效能越強。從幾何的角度(二維)的角度來理解非常直觀,我們需要這麼一條 linear separator,即,它既能對 training dataset 進行完美的分割,同時,我們希望距它最近的資料點距它的距離最大化(如上圖中間的那根直線)。否則,如果存在一個資料點距該 linear separator 的距離不是那麼遠,從直覺來說,圍繞在該資料點附近且與它 label 相同的一個新資料點隨意體現出的一個隨機波動,將使得這個新資料點越過 linear separator,導致分類錯誤。
因此,現在的問題是,如何將 margin 納入考量以求得這條最佳的 linear boundary?支援向量機將很好地解決這個問題。
Motivation(Why SVM?)
以下是 SVM 體現出的眼見的優勢:
-
SVM 返回一個 linear classifier,並且由於其演演算法使 margin solution 最大化,故這個 linear classifier 是一個穩定的解。
-
對 SVM 稍加改變,則能提供一種解決當資料集 non-separable 情況的方法。
-
SVM 同樣給出了進行非線性分類的隱性方法(implicit method,即上述的 kernel transformation)。
SVM Formula
假設存在一些 margin \(\gamma \in \Gamma\) 使得 training dataset \(\mathcal{S} = \mathcal{X} \times \mathcal{Y}\) 線性可分(但注意 linear separator 不一定穿過空間的原點)。
那麼,decision boundary:
Linear classifier:
思路
我們先分別求兩個平行的超平面,使得它們對所有的 training data point 進行正確的分類,再使這兩個超平面之間的距離最大化。
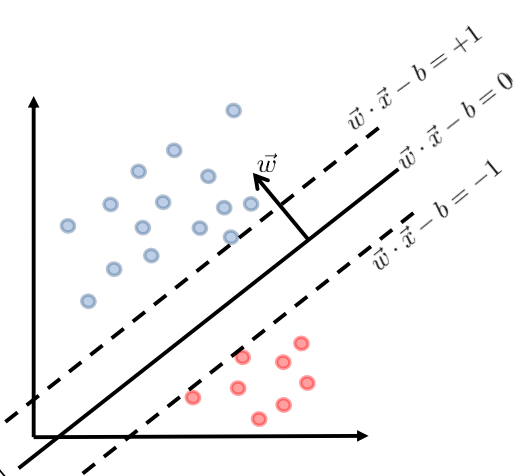
這也是所謂 「支援向量機(Support Vector Machine)」 名稱的由來,我們最終選定的支援向量 \(\vec{w}\) 就像千斤頂一樣將上述兩個平行的超平面 「支撐」 開來,並且支撐開的距離也將是儘可能的最大,如下圖所示。
Derivation
如上圖,兩個超平面的 decision boundary 可以寫作:
則兩個超平面之間的距離為:
-
對於初學者的直觀理解,推導可以通過二維平面上點到直線的距離進行類比,已知點 \((x_{0}, y_{0})\) 到直線 \(Ax + By + C = 0\) 的計算公式為:
\[\frac{|Ax_{0} + By_{0} + C|}{\sqrt{A^{2} + B^{2}}} \]
因此,設 \(\vec{w} \cdot \vec{x} - b = 1\) 上任意一點的座標為 \(\vec{x_{0}}\),故滿足:
\[\vec{w} \cdot \vec{x_{0}} - b - 1 = 0 \]
那麼兩平行超平面之間的距離為該點到另一超平面 \(\vec{w} \cdot \vec{x} - b = -1\) 的距離,即:
\[\begin{align*} \frac{|\vec{w} \cdot \vec{x_{0}} - b + 1|}{\sqrt{||\vec{w}||^{2}}} & = \frac{|\big( \vec{w} \cdot \vec{x_{0}} - b - 1 \big) + 2|}{\sqrt{||\vec{w}||^{2}}} \\ & = \frac{2}{||\vec{w}||} \end{align*} \]
因此,對於 \(\forall i \in \mathbb{N}^{+}\),當:
則 training data 全部被正確地分類。
-
理解
參考上圖,此處 \(\vec{w} \cdot \vec{x_{i}} - b \geq 1\) 和 \(\vec{w} \cdot \vec{x_{i}} - b \leq -1\) 的幾何意義是,將對於 label 為 \(1\) 和 \(-1\) 的 data point 分別排除在超平面 \(\vec{w} \cdot \vec{x} - b = 1\) 和 \(\vec{w} \cdot \vec{x} - b = -1\) 的兩邊外側,從而留下兩個超平面之間的空檔。
我們合併上面兩式為一個式子,則 training data 全部被正確地分類等價於:
現在我們得到了兩個超平面的距離表示式 \(\frac{2}{||\vec{w}||}\),同時需要滿足 constraints \(y_{i} \big( \vec{w} \cdot \vec{x_{i}} - b \big) \geq 1\) for \(\forall i \in \mathbb{N}^{+}\),我們希望在約束條件下使 \(\frac{2}{||\vec{w}||}\) 最大,那麼 SVM 轉變為運籌問題的求解,i.e.,
SVM Standard (Primal) Form
注意到,\(||\vec{w}|| \geq 0\) 恆成立,且若 \(||\vec{w}|| = 0\) 時,支援向量(即權重向量)\(\vec{w}\) 為零向量,使得 linear separator 無意義。故最大化 \(\frac{2}{||\vec{w}||}\) 等價於 最小化 \(\frac{1}{2} ||\vec{w}||\)。類似於線性迴歸中使用 Mean Square Error 而非 Mean Absolute Error 作為 loss function 的原因,\(||\vec{w}||\) 在原點處不可微,因此我們選擇 minimize \(\frac{1}{2} ||\vec{w}||^{2}\),而非原形式 \(\frac{1}{2}||\vec{w}||\),這當然是等價的。
故 SVM Standard (Primal) Form 如下:
SVM When Training Dataset is Non-separable
當 training dataset 無法被全部正確地分類時(即,不存在一個 margin \(\gamma \in \Gamma\) 使得 training dataset \(\mathcal{S} = \mathcal{X} \times \mathcal{Y}\) 線性可分),可以引入 slack variables 求解問題。
SVM Standard (Primal) Form with Slack
SVM Standard (Primal) Form with Slack 如下所示:
問題:如何求解最優的 \(\vec{w}, ~ b, ~ \vec{\xi}\) ?
由於涉及邊界問題,我們不能在目標函數中直接對 \(\vec{w}, ~ b, ~ \vec{\xi}\) 求偏導。我們有以下兩種解決辦法:
-
Projection Methods
從一個滿足 constraints 的解 \(\vec{x_{0}}\) 開始,求能使得 objective function 略微減小的 \(\vec{x_{1}}\)。如果所求到的 \(\vec{x_{1}}\) 違反了 constraints,那麼 project back to the constraints 進行迭代。這種方法偏向於利用演演算法求解,從原理上類似於梯度下降演演算法以及前文介紹的 Perceptron Algorithm。
-
Penalty Methods
使用懲罰函數將 constraints 併入 objective function,對於違反 constraints 的解 \(\vec{x}\) 予以懲罰。
The Lagrange (Penalty) Method:拉格朗日(懲罰)方法
考慮增廣函數:
其中,\(L(\vec{x}, \vec{\lambda})\) 為拉格朗日函數,\(\lambda_{i}\) 為拉格朗日變數(或對偶變數,dual variables)。
對於此類函數,我們所需要的目標的 canonical form 為:
由於 \(g_{i}(\vec{x}) \leq 0\) for \(\forall i \in \mathbb{N}^{+}\),則對於任意的 feasible \(\vec{x}\) 以及任意的 \(\vec{\lambda_{i}} \geq 0\),都有:
因此:
注意到上式中的 \(\max\limits_{\lambda_{i} \geq 0} L(\vec{x}, \vec{\lambda})\),這代表我們在 \(\vec{\lambda}\) 所在的空間 \([0, ~ \infty)^{n}\) 中搜尋使拉格朗日函數最大的 \(\vec{\lambda}\),即搜尋各個對應的 \(\lambda_{i} \in [0, ~ \infty)\)。
尤其注意上式 是針對 feasible \(\vec{x}\) 成立。因為 \(\max\limits_{\lambda_{i} \geq 0} L(\vec{x}, \vec{\lambda})\) 會導致:
-
當 \(\vec{x}\) infeasible 時,意味著 \(\vec{x}\) 不全滿足所有約束條件 \(g_{i}(\vec{x}) \leq 0\) for \(\forall i \in \mathbb{N}^{+}\),這意味著:
\[\exists i: ~ g_{i}(\vec{x}) > 0 \]
那麼:
\[\begin{align*} \max\limits_{\lambda_{i} \geq 0} L(\vec{x}, \vec{\lambda}) & = \max\limits_{\lambda_{i} \geq 0} \Big( f(\vec{x}) + \sum\limits_{i=1}^{n} \lambda_{i} g_{i}(\vec{x}) \Big) \\ & = f(\vec{x}) + \max\limits_{\lambda_{i} \geq 0} \sum\limits_{i=1}^{n} \lambda_{i} g_{i}(\vec{x}) \\ & = \infty \end{align*} \]
這是因為: 只要對應的 \(\lambda_{i} \rightarrow \infty\),則 \(\lambda_{i} g_{i}(\vec{x}) \rightarrow \infty\)(因為 \(g_{i}(\vec{x}) > 0\)),從而 \(\sum\limits_{i=1}^{n} \lambda_{i} g_{i}(\vec{x}) \rightarrow \infty\),故 \(L(\vec{x}, \vec{\lambda}) = f(\vec{x}) + \sum\limits_{i=1}^{n} \lambda_{i} g_{i}(\vec{x}) \rightarrow \infty\)。
所以此時不滿足 \(\max\limits_{\lambda_{i} \geq 0} L(\vec{x}, \vec{\lambda}) \leq f(\vec{x})\)。
-
當 \(\vec{x}\) feasible 時,即對於 \(\forall i \in \mathbb{N}^{+}\),約束條件 \(g_{i}(\vec{x}) \leq 0\) 都成立,那麼:
\[\forall i \in \mathbb{N}^{+}: ~ g_{i}(\vec{x}) \quad \implies \quad\sum\limits_{i=1}^{n} \lambda_{i} g_{i}(\vec{x}) \leq 0 \]
因此 \(\max\limits_{\lambda_{i} \geq 0} \sum\limits_{i=1}^{n} \lambda_{i} g_{i}(\vec{x}) = 0\),即令所有 \(\lambda_{i}\) 都為 \(0\),故:
\[\begin{align*} \max\limits_{\lambda_{i} \geq 0} L(\vec{x}, \vec{\lambda}) & = \max\limits_{\lambda_{i} \geq 0} \Big( f(\vec{x}) + \sum\limits_{i=1}^{n} \lambda_{i} g_{i}(\vec{x}) \Big) \\ & = f(\vec{x}) + \max\limits_{\lambda_{i} \geq 0} \Big( \sum\limits_{i=1}^{n} \lambda_{i} g_{i}(\vec{x}) \Big) \\ & = f(\vec{x}) \end{align*} \]
根據上述結論,給定任意 feasible \(\vec{x}\) 以及任意 \(\lambda_{i} \geq 0\),有:
且:
因此,原先的 constrained optimization problem 的 optimal solution 為:
-
如何理解 \(\min\limits_{\vec{x}} \max\limits_{\lambda_{i} \geq 0} L(\vec{x}, \vec{\lambda})\)?
\(L(\vec{x}, \vec{\lambda})\) 是向量 \(\vec{x}\) 和 \(\vec{\lambda}\) 的函數,從向量角度可以抽象為一個二元函數。因此,計算邏輯是,對於每一個給定的 \(\vec{x_{0}}\),可以得到僅關於 \(\vec{\lambda}\) 的函數 \(L(\vec{x_{0}}, \vec{\lambda})\),然後求出使對應的 \(L(\vec{x_{0}}, \vec{\lambda})\) 最大的各 \(\vec{\lambda_{(\vec{x_{0}})}}^{*}\)(i.e.,各 \(\lambda_{i}^{*}\))。因此內層 \(\max\limits_{\lambda_{i} \geq 0} L(\vec{x}, \vec{\lambda})\) 返回一個對於任意給定的 \(\vec{x_{0}}\),使得 \(L(\vec{x_{0}}, \vec{\lambda})\) 最大的 \(\vec{\lambda}\) 的集合。那麼,\(\max\limits_{\lambda_{i} \geq 0} L(\vec{x}, \vec{\lambda})\) 是一個僅關於 \(\vec{x}\) 的函數,再在外層求使得這個函數最小的 \(\vec{x}^{*}\),即 \(\min\limits_{\vec{x}} \Big( \max\limits_{\lambda_{i} \geq 0} L(\vec{x}, \vec{\lambda}) \Big)\),其結果可以寫為:
\[\min\limits_{\vec{x}} \max\limits_{\lambda_{i} \geq 0} L(\vec{x}, \vec{\lambda}) = L(\vec{x}^{*}, \vec{\lambda_{(\vec{x}^{*})}}^{*}) \]
-
解釋(為什麼它是 optimal solution?):
因為,對於任意的 \(\vec{x}\)(無論是否 feasible),\(\max\limits_{\lambda_{i} \geq 0} L(\vec{x}, \vec{\lambda})\) 計算出的結果可能為 \(f(\vec{x})\)(當 \(\vec{x}\) 為 feasible),也可能為 \(\infty\)(當 \(\vec{x}\) 為 infeasible)。但沒關係,在最外層的 \(\min\limits_{\vec{x}}\) 可以對 \(\vec{x}\) 進行篩選,使最終選出的 \(\vec{x}^{*}\) 不可能為 infeasible,否則相當於 \(\min\limits_{\vec{x}}\) 計算出的結果為 \(\infty\),這是隻要存在 feasible region 就不可能發生的事情。
本文來自部落格園,作者:車天健,轉載請註明原文連結:https://www.cnblogs.com/chetianjian/p/17279116.html