論文解讀(CAN)《Contrastive Adaptation Network for Unsupervised Domain Adaptation》
論文資訊
論文標題:Contrastive Adaptation Network for Unsupervised Domain Adaptation
論文作者:Guoliang Kang, Lu Jiang, Yi Yang, Alexander G Hauptmann
論文來源:CVPR 2019
論文地址:download
論文程式碼:download
1 Preface
出發點:
-
- 無監督域自適應(UDA)對目標域資料進行預測,而標籤僅在源域中可用;
- 以往的方法將忽略類資訊的域差異最小化,可能導致錯位和泛化效能差;
例子:
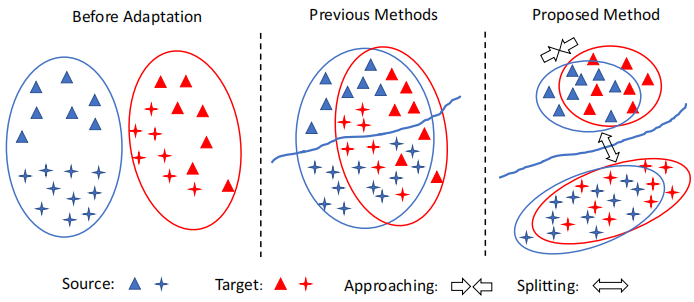
Left:在適應之前,源資料和目標資料之間存在域偏移;Middle:類不可知的自適應在域級將源資料和目標資料對齊,忽略了樣本的類標籤,因此可能導致次優解。因此,一個標籤的目標樣本可能與不同標籤的源樣本不一致;Right:我們的方法執行跨域的類感知對齊。為了避免錯位,只減少了類內域的差異。將類間域差異最大化,提高了模型的泛化能力。
Middle 中的先前方法存在的問題:First, samples of different classes may be aligned incorrectly, e.g. both MMD and JMMD can be minimized even when the target-domain samples are misaligned with the source-domain samples of a different class. Second, the learned decision boundary may generalize poorly for the target domain.
本文提出的 CAN 網路(Contrastive Adaptation Network)優化了一個顯式地對類內域差異和類間域差異建模的新度量,設計了一種交替更新 (alternating update)的訓練策略,可以端到端(end-to-end)的方式進行。
2 Related Work
Class-agnostic domain alignment
MMD 距離(Maximum mean discrepancy),度量在再生希爾伯特空間中兩個分佈的距離,是一種核學習方法。 兩個隨機變數的距離為:
$\operatorname{MMD}[\mathcal{F}, p, q] := \underset{f \in \mathcal{F}}{\text{sup}} \left(\mathbf{E}_{p}[f(x)]-\mathbf{E}_{q}[f(y)]\right)$
$\operatorname{MMD}[\mathcal{F}, X, Y] :=\underset{f \in \mathcal{F}}{\text{sup}}\left(\frac{1}{m} \sum\limits _{i=1}^{m} f\left(x_{i}\right)-\frac{1}{n} \sum\limits_{i=1}^{n} f\left(y_{i}\right)\right)$
MMD距離的原始定義如上,$f$ 為屬於函數域 $\mathcal{F}$ 中的函數,直觀上理解就是兩個分佈經過一個定 義好的函數域 $\mathcal{F}$ 中的任意函數 $f$ 對映後的期望之差的最大值(上界)。在實際應用中,對映後的期望,通過樣本均值來估計。一個直觀的理解就是如果兩個分佈一樣時,那麼只要取樣的樣本足夠多,那麼不論函數域怎麼定義,其 MMD 距離都是 $0$,因為不論通過什麼樣的函數對映後,兩個一樣的分佈對映後的分佈還是一樣的,那麼他們的期望之差都為 $0$ ,上界也就是 $0$。
$\operatorname{MMD}[\mathcal{F}, X, Y]=\left[\frac{1}{m^{2}} \sum\limits _{i, j=1}^{m} k\left(x_{i}, x_{j}\right)-\frac{2}{m n} \sum\limits_{i, j=1}^{m, n} k\left(x_{i}, y_{j}\right)+\frac{1}{n^{2}} \sum\limits_{i, j=1}^{n} k\left(y_{i}, y_{j}\right)\right]^{\frac{1}{2}}$
3 Problem Statement
Unsupervised Domain Adaptation (UDA) aims at improving the model's generalization performance on target domain by mitigating the domain shift in data distribution of the source and target domain. Formally, given a set of source domain samples $\mathcal{S}=\left\{\left(\boldsymbol{x}_{1}^{s}, y_{1}^{s}\right), \cdots,\left(\boldsymbol{x}_{N_{s}}^{s}, y_{N_{s}}^{s}\right)\right\}$ , and target domain samples $\mathcal{T}=\left\{\boldsymbol{x}_{1}^{t}, \cdots, \boldsymbol{x}_{N_{t}}^{t}\right\}$, $\boldsymbol{x}^{s}$ , $\boldsymbol{x}^{t}$ represent the input data, and $y^{s} \in\{0,1, \cdots, M-1\}$ denote the source data label of $M$ classes. The target data label $y^{t} \in\{0,1, \cdots, M-1\}$ is unknown. Thus, in UDA, we are interested in training a network using labeled source domain data $\mathcal{S}$ and unlabeled target domain data $\mathcal{T}$ to make accurate predictions $\left\{\hat{y}^{t}\right\}$ on $\mathcal{T}$ .
We discuss our method in the context ofdeep neural networks. In deep neural networks, a sample owns hierarchical features/representations denoted by the activations of each layer $l \in \mathcal{L}$ . In the following, we use $\phi_{l}(\boldsymbol{x})$ to denote the outputs of layer $l$ in a deep neural network $\Phi_{\theta}$ for the input $\boldsymbol{x}$ , where $\phi(\cdot)$ denotes the mapping defined by the deep neural network from the input to a specific layer.
4 Method
4.1 Maximum Mean Discrepancy Revisit
$\mathcal{D}_{\mathcal{H}}(P, Q) \triangleq \underset{f \sim \mathcal{H}}{\text{sup}} \left(\mathbb{E}_{\boldsymbol{X}^{s}}\left[f\left(\boldsymbol{X}^{s}\right)\right]-\mathbb{E}_{\boldsymbol{X}^{t}}\left[f\left(\boldsymbol{X}^{t}\right)\right]\right)_{\mathcal{H}} \quad\quad\quad(1)$
在實際應用中,對於第 $l$ 層,MMD 的平方值是用經驗核均值嵌入來估計的:
$\begin{aligned}\hat{\mathcal{D}}_{l}^{m m d} & =\frac{1}{n_{s}^{2}} \sum_{i=1}^{n_{s}} \sum_{j=1}^{n_{s}} k_{l}\left(\phi_{l}\left(\boldsymbol{x}_{i}^{s}\right), \phi_{l}\left(\boldsymbol{x}_{j}^{s}\right)\right) \\& +\frac{1}{n_{t}^{2}} \sum_{i=1}^{n_{t}} \sum_{j=1}^{n_{t}} k_{l}\left(\phi_{l}\left(\boldsymbol{x}_{i}^{t}\right), \phi_{l}\left(\boldsymbol{x}_{j}^{t}\right)\right) \\& -\frac{2}{n_{s} n_{t}} \sum_{i=1}^{n_{s}} \sum_{j=1}^{n_{t}} k_{l}\left(\phi_{l}\left(\boldsymbol{x}_{i}^{s}\right), \phi_{l}\left(\boldsymbol{x}_{j}^{t}\right)\right)\end{aligned}\quad\quad\quad(2)$
其中,$x^{s} \in \mathcal{S}^{\prime} \subset \mathcal{S}$,$x^{t} \in \mathcal{T}^{\prime} \subset \mathcal{T}$,$n_{s}=\left|\mathcal{S}^{\prime}\right|$,$n_{t}=\left|\mathcal{T}^{\prime}\right|$。$\mathcal{S}^{\prime}$ 和 $\mathcal{T}^{\prime}$ 分別表示從 $S$ 和 $T$ 中取樣的小批次源資料和目標資料。$k_{l}$ 表示深度神經網路第 $l$ 層選擇的核。
4.2 Contrastive Domain Discrepancy
CDD 明確地考慮類資訊,並衡量跨域的類內和類間的差異。最小化類內域差異以壓縮類內樣本的特徵表示,而最大以類間域差異使彼此的表示更遠離決策邊界。聯合優化了類內和類間的差異,以提高了自適應效能。所提出的對比域差異(CDD)是基於條件資料分佈之間的差異。MMD 沒有對資料分佈的型別(例如邊際或條件)的任何限制,MMD 可以方便地測量 $P\left(\phi\left(\boldsymbol{X}^{s}\right) \mid Y^{s}\right)$ 和 $Q\left(\phi\left(\boldsymbol{X}^{t}\right) \mid Y^{t}\right)$ 之間的差異:
$\mathcal{D}_{\mathcal{H}}(P, Q) \triangleq \sup _{f \sim \mathcal{H}}\left(\mathbb{E}_{\boldsymbol{X}^{s}}\left[f\left(\phi\left(\boldsymbol{X}^{s}\right) \mid Y^{s}\right)\right]-\mathbb{E}_{\boldsymbol{X}^{t}}\left[f\left(\phi\left(\boldsymbol{X}^{t}\right) \mid Y^{t}\right)\right]\right)_{\mathcal{H}}$
$\mu_{c c^{\prime}}\left(y, y^{\prime}\right)=\left\{\begin{array}{ll}1 & \text { if } y=c, y^{\prime}=c^{\prime} \\0 & \text { otherwise }\end{array}\right.$
其中,$c_1$ 和 $c_2$ 可以是不同的類,也可以是相同的類。
對於兩類 $c_1$ 和 $c_2$,$\mathcal{D}_{\mathcal{H}}(P, Q)$ 平方的核平均嵌入估計為:
$ \hat{\mathcal{D}}^{c_{1} c_{2}}\left(\hat{y}_{1}^{t}, \hat{y}_{2}^{t}, \cdots, \hat{y}_{n_{t}}^{t}, \phi\right)=e_{1}+e_{2}-2 e_{3} \quad \quad\quad(3) $
Note:$\text{Eq.3}$ 定義了兩種類感知域差異,1:當 $c_{1}=c_{2}=c$ 時,它測量類內域差異;2:當 $c_{1} \neq c_{2}$ 時,它成為類間域差異。
CDD 完整計算如下:
其中,$\hat{y}_{1}^{t}, \hat{y}_{2}^{t}, \cdots, \hat{y}_{n_{t}}^{t}$ 簡寫為 $\hat{y}_{1: n_{t}}^{t}$。
4.3 Contrastive Adaptation Network
在本文中,我們從 ImageNet [7] 預訓練網路開始,例如 ResNet [14,15],並將最後一個 FC 層替換為特定於任務的 FC 層。我們遵循一般的做法,將最後的 FC 層的域差異最小化,並通過反向傳播來微調折積層。然後,我們提出的 CDD 可以很容易地作為 FC 層啟用的適應模組整合到目標中。我們將我們的網路命名為對比自適應網路(CAN)。總體目標:在深度 CNN 中,我們需要在多個 FC 層上最小化 CDD,即最小化
此外,通過最小化交叉熵損失來訓練具有標籤的源資料網路:
$\ell^{c e}=-\frac{1}{n^{\prime}} \sum\limits _{i^{\prime}=1}^{n_{s}^{\prime}} \log P_{\theta}\left(y_{i^{\prime}}^{s} \mid \boldsymbol{x}_{i^{\prime}}^{s}\right)\quad \quad\quad(7) $
其中,$y^{s} \in\{0,1, \cdots, M-1\}$ 代表源域中的樣本 $\boldsymbol{x}^{s}$ 的標籤,$P_{\theta}(y \mid \boldsymbol{x})$ 表示給定輸入 $\boldsymbol{x}$,用 $\theta$ 引數化的標籤 $y$ 的預測概率。
因此,總體目標可以表述為:
$\underset{\theta}{\text{min}}\quad \ell=\ell^{c e}+\beta \hat{\mathcal{D}}_{\mathcal{L}}^{c d d}\quad \quad\quad(8) $
請注意,我們對標記的源資料進行獨立取樣,以最小化交叉熵損失 $\ell^{c e}$,並估計 $\operatorname{CDD} \hat{\mathcal{D}}_{\mathcal{L}}^{c d d}$。通過這種方式,我們能夠設計更有效的取樣策略,以促進 CDD 的小批次隨機優化,同時不干擾標記源資料的交叉熵損失的傳統優化。
4.4 Optimizing CAN
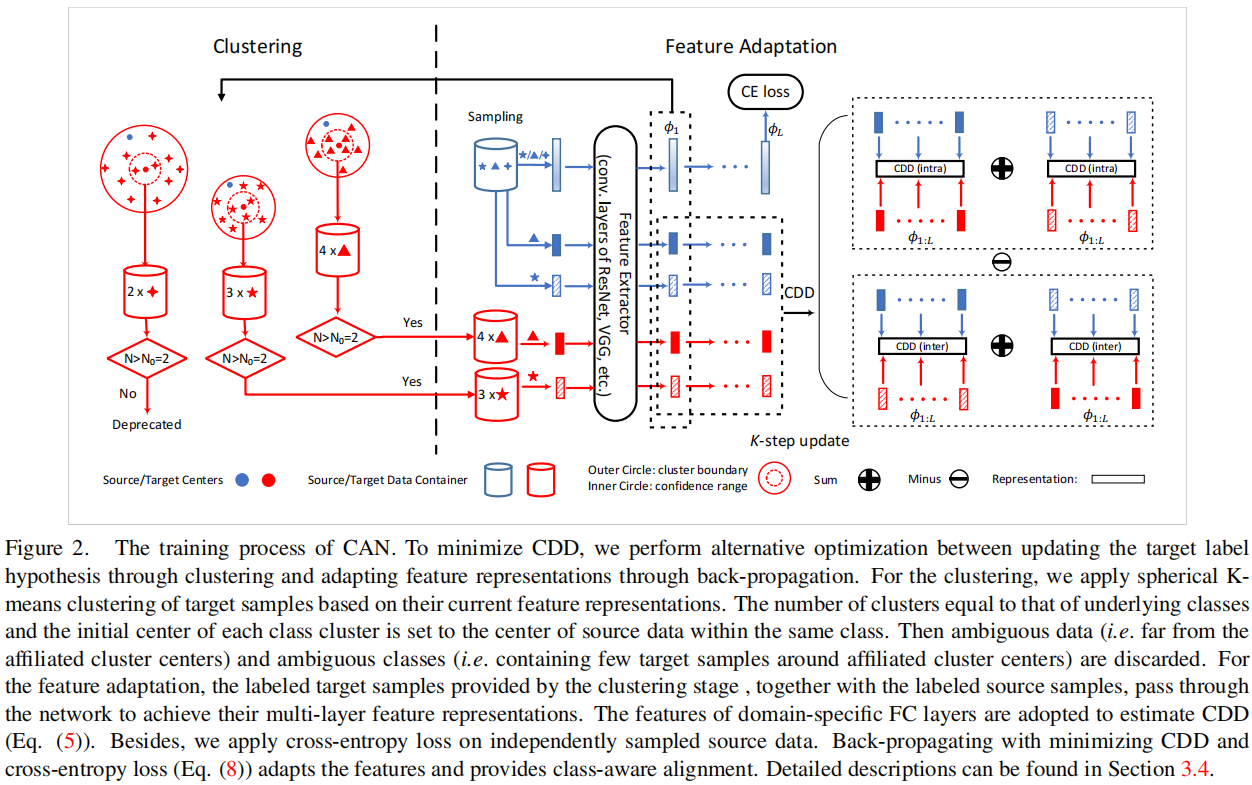
CAN 的框架如 Figure2 所示。在本節中,我們主要集中討論如何儘量減少 CAN 中的 CDD 損失。
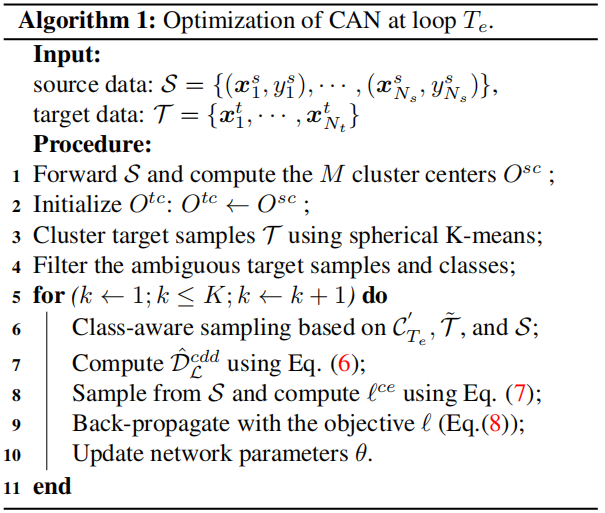
4.4.1 Alternative optimization (AO)
如 $\text{Eq.5}$ 中所示,我們需要共同優化目標標籤假設 $\hat{y}_{1: n_{t}}^{t}$ 和特徵表示 $\phi_{1: L}$,本文采用了交替優化來執行這種優化。
假設有 $M$ 類,所以可以設定 $\mathrm{K}=\mathrm{M}$ 。
步驟:
1)使用源域的資料的表徵計算每個類別的樣本編碼中心: $\mathrm{O}^{\mathrm{s}, \mathrm{c}}$ ,其中 $\mathrm{c}$ 是某個特定的類別,我們用這些源域中心初始化目標域的聚類的中心 $\mathrm{O}^{\mathrm{t}, \mathrm{c}}$ ,其中:
$\mathrm{O}^{\mathrm{sc}}=\sum_{i=1}^{\mathrm{n}_{\mathrm{s}}} 1_{y_{i}^{\mathrm{s}}=\mathrm{c}} \frac{\phi_{1}\left(\mathrm{x}_{\mathrm{i}}^{\mathrm{s}}\right)}{\left.\| \mathrm{x}_{\mathrm{i}}\right) \|}$$
$1_{y_{\mathrm{i}}^{\mathrm{s}}=\mathrm{c}}=\left\{\begin{array}{ll}1 & \text { if } \mathrm{y}_{\mathrm{i}}^{\mathrm{s}}=\mathrm{c} ; \\0 & \text { otherwise. }\end{array}, \mathrm{c}=\{0,1, \ldots, \mathrm{M}-1\}\right.$
2)計算樣本與中心之間的距離,我們使用餘弦距離,即:$\operatorname{dist}(\mathrm{a}, \mathrm{b})=\frac{1}{2}\left(1-\frac{\mathrm{a} \cdot \mathrm{b}}{\|\mathrm{a}\|\|\mathrm{b}\|}\right) $
3)聚類的過程是迭代的:
(1) 對每個目標域的樣本找到所對應的聚類中心: $\hat{y}_{\mathrm{i}}^{\mathrm{t}}=\underset{c}{\arg \min \operatorname{dist}}\left(\phi\left(\mathrm{x}_{\mathrm{i}}^{\mathrm{t}}\right), \mathrm{O}^{\mathrm{tc}}\right) $;
(2) 更新聚類中心: $\mathrm{O}^{\mathrm{tc}} \leftarrow \sum_{\mathrm{i}=1}^{\mathrm{N}_{\mathrm{t}}} 1_{\hat{y}_{\mathrm{i}}^{\mathrm{t}}=\mathrm{c}}\frac{\phi_{1}\left(\mathrm{x}_{\mathrm{t}}^{\mathrm{t}}\right)}{\left\|\phi_{1}\left(\mathrm{x}_{\mathrm{i}}\right)\right\|}$
迭代直到收斂或者抵達最大聚類步數停止;
4)聚類結束後,每個目標域的樣本 $\mathrm{x}_{\mathrm{i}}^{\mathrm{t}}$ 被賦予一個標籤 $ \hat{y}_{\mathrm{i}}^{\mathrm{t}}$;
5)此外,設定一個閾值 $\mathrm{D}_{0} \in[0,1]$ ,將屬於某個簇但是距離仍然超過給定閾值的資料樣本刪除,不參與本次計算 CDD,僅保留距離小於 $\mathrm{D}_{0}$ 的樣本:
$\hat{\mathcal{T}}=\left(\mathrm{x}^{\mathrm{t}}, \hat{\mathrm{y}}^{\mathrm{t}}\right) \mid \operatorname{dist}\left(\phi_{1}\left(\mathrm{x}^{\mathrm{t}}\right), \mathrm{O}^{\mathrm{t}, \hat{\mathrm{y}}^{\mathrm{t}}}\right)<\mathrm{D}_{0}, \mathrm{x}^{\mathrm{t}} \in \mathcal{T}$
6)此外,為了提供更準確的樣本分佈的統計資料,假設每個類別挑選出來的集合 $ \hat{\mathcal{T}}$ 的大小至少包含某個數量 $N_{0}$ 的樣本,不然這個類別本次也不參與計算 CDD,即最後參與計算的類別集為:
$\mathcal{C}_{T_{e}}=\left\{c \mid \sum_{i}^{|\mathcal{T}|} \mathbf{1}_{\hat{y}_{i}^{t}=c}>N_{0}, c \in \{0,1, \cdots, M-1\} \right \} $
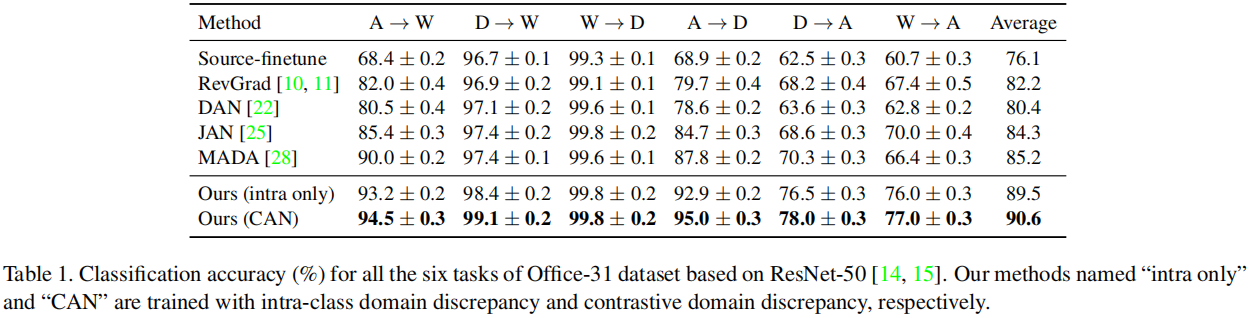
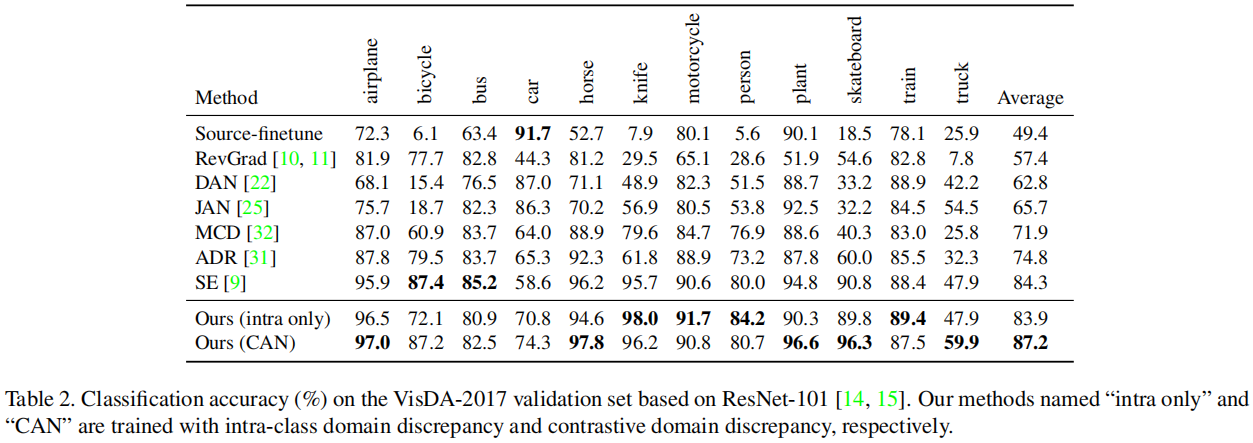
5 Experiment
因上求緣,果上努力~~~~ 作者:加微信X466550探討,轉載請註明原文連結:https://www.cnblogs.com/BlairGrowing/p/17019243.html