時間片差分排程法-充分利用MCU的資源
前言
通過該篇學習了嵌入式的任務排程(即時間片論法)後,瞭解到通過以1ms為排程時間單位輪詢判斷是否需要執行函數任務,那麼下面介紹如何基於時間片論法的任務排程模式充分利用MCU的資源,姑且先稱這種方式為時間片差分排程法。
充分利用MCU的資源指的是在不影響原有的函數排程情況下合理進行分配,避免MCU大部分時間處於空跑狀態(即大部分時間沒有排程任何的功能函數,只是在不停地判斷時間狀態,從而造成的資源浪費),同時提高每個任務的排程週期的命中率(按時準點執行)
背景
時間片論法不比作業系統,作業系統可以通過任務優先順序搶佔當前正在執行的低優先順序任務,或者高優先順序任務主動睡眠釋放MCU資源以便低優先順序的任務可以正常執行;時間片論法必須等待當前任務執行完成後才能執行下一個任務(中斷除外)。
因此,由於時間片論法的特性,很難保證某些任務能夠及時得到排程執行,特別是所需要的排程任務多的情況下,常常出現不能及時排程的問題(雖然整體排程週期不變),從而影響所需要的功能,常見的做法可能通過定時中斷觸發的方式去執行,可是碰到一些任務函數執行時間稍微長的就會影響中斷的響應等。
可以看下面的函數排程時長圖,每個刻度為200us(以下稱節拍),排程單位為1ms(以下稱時間片),只以200us以上的任務舉例,方便進行理解
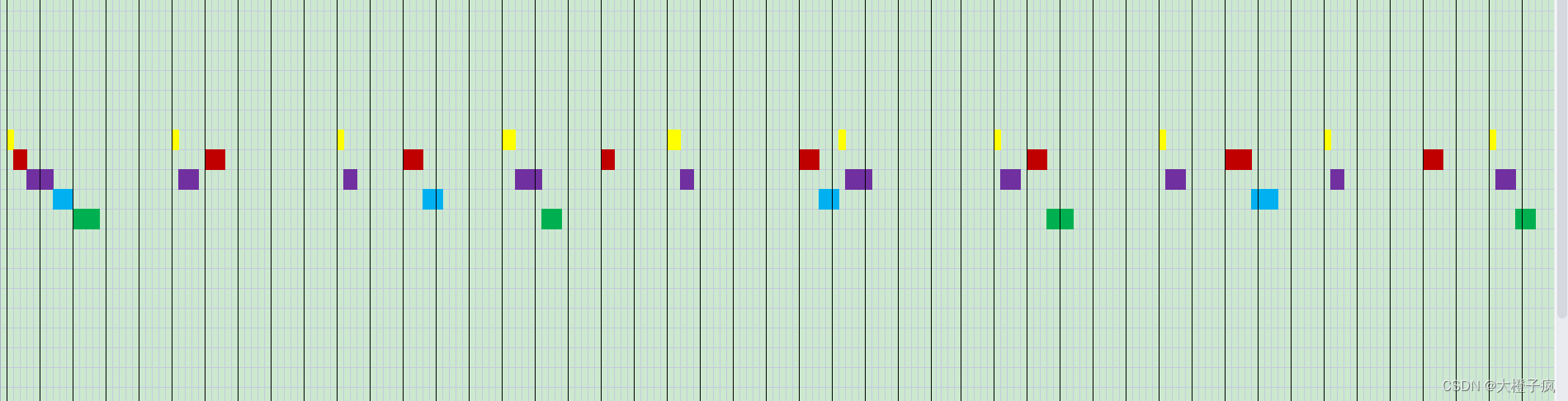
從上述圖中可知以下資訊:
- 圖中一共有五個任務函數,每個任務函數的執行時間不定
- 任務1(黃色)週期為5ms
- 任務2(紅色)週期為6ms
- 任務5(紫色)週期為5ms
- 任務4(藍色)週期為12ms
- 任務5(綠色)週期為15ms- 同一時刻觸發任務排程的執行時的順序(排程函數的順序即可任務預設優先順序):1>2>3>4>5
- 第25ms時任務1的排程慢了一個節拍,原因是任務2和4的排程總時長超過了時間片的時長
- 除了任務1大部分時間都能及時被排程,其他任務並不能被及時排程,雖然週期不變,但命中率不高(甚至等於0)
- 其中存在週期性的幾個時間片大部分時間處於空跑狀態
- ...等其他仔細觀察的可知資訊,這裡就不多說了
從獲取的資訊可知,大部分任務雖然整體週期沒變,但是幾乎很少有低優先順序的任務有較高的命中率,這樣就導致某些功能需要較高的命中率同時執行時間相對較長(不能放在中斷中的任務函數)就不能正常工作。
如何優化
在優化之前,首先看下面這個有一定規律的函數排程時長圖
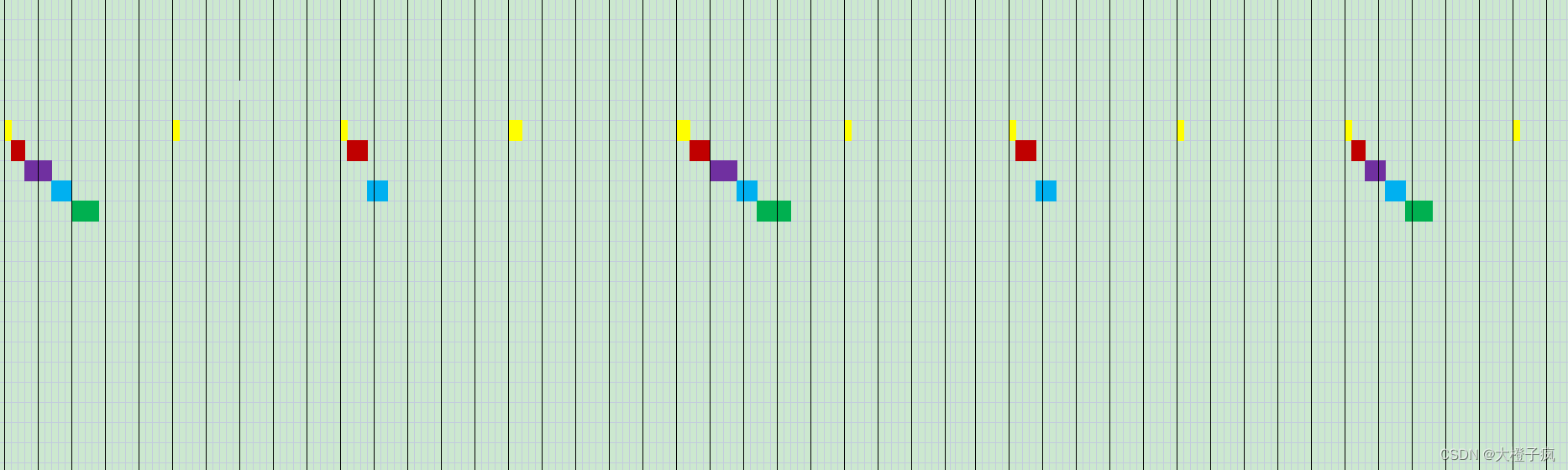
- 還是五個任務,而規律就是函數任務公約數=最小排程週期任務,即5ms(假設小於5ms的任務大都執行時間非常短,在此可忽略不計)
- 任務1(黃色)週期為5ms
- 任務2(紅色)週期為10ms
- 任務5(紫色)週期為20ms
- 任務4(藍色)週期為10ms
- 任務5(綠色)週期為20ms- 圖中所展示的任務排程命中率也不高,也存在週期性的幾個時間片大部分時間處於空跑狀態
看一下優化前後的對比圖,雖然還是存在大部分時間處於空跑狀態,但是命中率提高到了100%
只要保證每個任務函數耗時小於排程單位,那麼就能做到命中率 100%
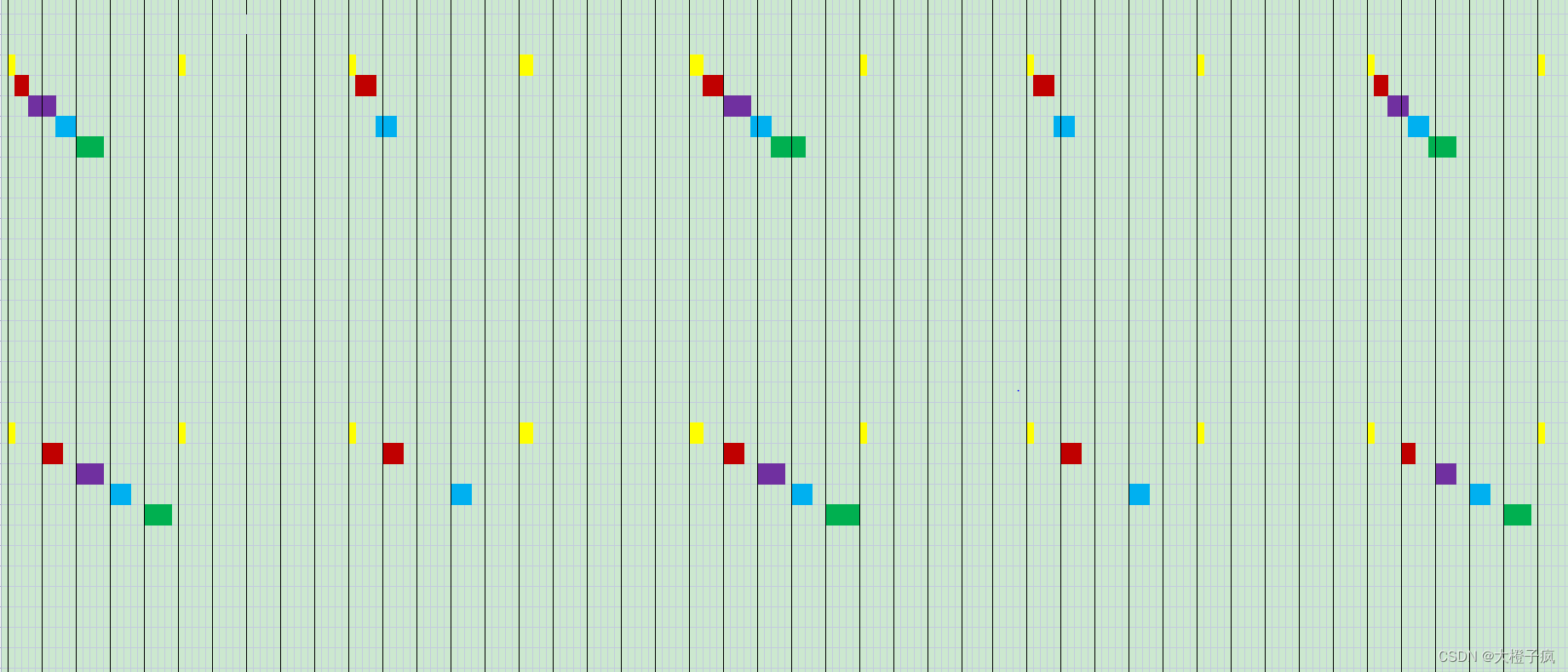
如何實現的?
從優化後的圖中可以瞭解到,第一個時刻排程的時候只有任務1,第二個時間排程只有任務2,以此類推,就可以在一定程度上避開同一時刻多個任務需要同時等待排程,從而引發的擁堵。
可以通過每個任務計時器的倒計時初值進行調整,從而達到每個時間排程只執行一個任務的目的,提高任務的命中率。
那麼接下來按照上面提到的規律去優化剛開始的那個,主要有兩點:
- 在可接受範圍內調整任務的週期,儘量保證任務函數任務公約數=最小排程週期任務
可以理解稱任務公約數等於多少就代表可以在初值上類推多少個任務進行錯開初次執行;可以忽略部分函數耗時特別短的任務
- 調整每個任務倒計時器的初值,儘量錯開擁堵時刻
任務多的情況下只能夠儘量避免,從而提高命中率,通過每個任務排程週期和執行時長進行推算,得到每個任務的最佳的初值
根據以上兩點對上述排程任務進行優化如下:
五個任務函數在可接受範圍內調整任務週期後,同時調整初值
- 任務1(黃色)週期為5ms
- 任務2(紅色)週期為5ms
- 任務5(紫色)週期為5ms
- 任務4(藍色)週期為10ms
- 任務5(綠色)週期為15ms
得到對比圖:
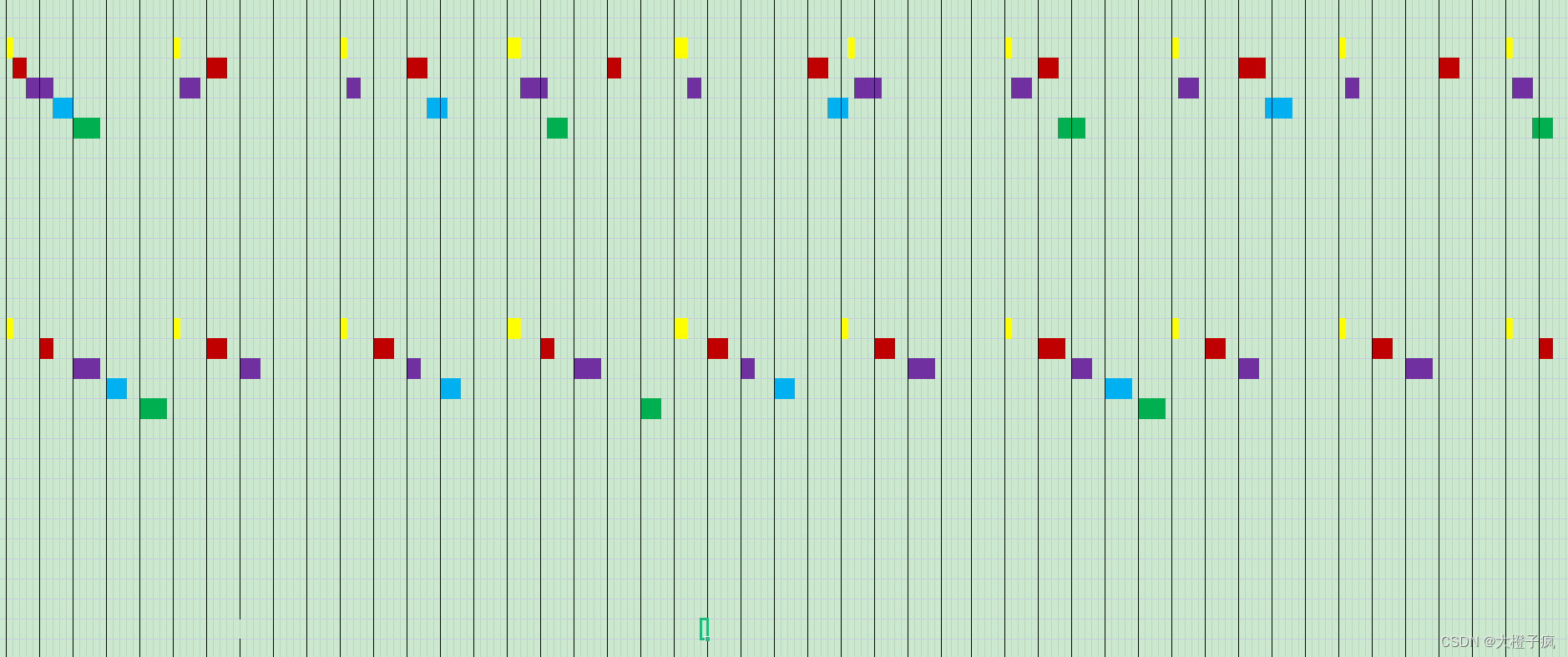
此次優化將充分地利用了每個時間片的資源,雖然某一段時間內的空跑時間總和一樣,但是實際上將空跑的時間進行了分散,提高了資源的使用率,從而讓每個任務的命中率提高到100%。
本文來自部落格園,作者:大橙子瘋,轉載請註明原文連結:https://www.cnblogs.com/const-zpc/p/16988879.html