影象處理技術:數位影像分割 ------ 影象分割、邊界分割(邊緣檢測)、區域分割
2022-11-23 06:02:09
影象處理技術 相關知識目錄(順序):
- 影象處理技術Digital Image Processing:導論 ----- 初始影象 - slowlydance2me - 部落格園 (cnblogs.com)
- 影象處理技術:導論 ----- 影象工程 - slowlydance2me - 部落格園 (cnblogs.com)
- 影象處理技術: 導論 ----- 影象處理系統 - slowlydance2me - 部落格園 (cnblogs.com)
- 影象處理技術:MATLAB介紹 ----- 工作環境 - slowlydance2me - 部落格園 (cnblogs.com)
- 影象處理技術:影象獲取 ----- 三、MATLAB基礎知識 - slowlydance2me - 部落格園 (cnblogs.com)
- 影象處理技術:影象獲取 ----- 影象獲取過程以及相關函數 - slowlydance2me - 部落格園 (cnblogs.com)
- 影象處理技術:影象變換 ----- 算數運算 與 集合變換 - slowlydance2me - 部落格園 (cnblogs.com)
- 影象處理技術:影象變換 ------ 形態學變換 - slowlydance2me - 部落格園 (cnblogs.com)
- 影象處理技術:影象變換 ----- 霍夫變換hough (區域性特徵檢測) - slowlydance2me - 部落格園 (cnblogs.com)
- 影象處理結束: 影象變化 ----- 傅立葉變換 FT / FFT (空間域轉頻率域 灰度函數轉頻率函數) - slowlydance2me - 部落格園 (cnblogs.com)
- 影象處理技術:影象變換 ---- 離散餘弦變換 DCT (影象壓縮 低頻) - slowlydance2me - 部落格園 (cnblogs.com)
- 影象處理技術: 數位影像增強 ----- 一、影象空域增強 - slowlydance2me - 部落格園 (cnblogs.com)
- 影象處理技術:數位影像增強 ----- 影象頻域增強 DFT - slowlydance2me - 部落格園 (cnblogs.com)
- 影象處理技術:數位影像復原 ----- 影象退化/復原、影象噪聲、影象空域/頻域恢復技術 - slowlydance2me - 部落格園 (cnblogs.com)
- 影象處理技術:數位影像壓縮 ----- 影象冗餘、無失真壓縮、有失真壓縮、影象壓縮標準 - slowlydance2me - 部落格園 (cnblogs.com)
- 影象處理技術:數位影像分割 ------ 影象分割、邊界分割(邊緣檢測)、區域分割 - slowlydance2me - 部落格園 (cnblogs.com)
一、影象分割概述
• 定義
是指根據灰度、彩色、空間紋理、幾何形狀等特徵把影象劃分
成若干個互不相交的區域,使得這些特徵在同一區域內表現出一致
性或相似性,而在不同區域間表現出明顯的不同
分割出來的區域應該同時滿足:
(1)分割出來的影象區域的均勻性和連通性。
• 均勻性是指該區城中的所有畫素點都滿足基於灰度、紋理、彩
色等特徵的某種相似性準則;
• 連通性是指該區城記憶體在連線任意兩點的路徑。
(2)相鄰分割區域之間針對選定的某種差異顯著性。
(3)分割區域邊界應該規整,同時保證邊緣的空間定位精度。
影象分割的特點:
• 是影象處理中最困難的問題之一;
• 是影象分析的第一步,是計算機視覺的基礎,是影象理解的重要組成部分;
• 被認為是計算機視覺中的一個「瓶頸」;
• 雖然沒有通用方法,但是對其一般性規律形成基本共識,產生了相當多的研
究成果和方法。
• 分類
根據影象分割原理分類:
• 原理:影象區域內部的畫素一般具有灰度相似性,而在區域之間的邊界上一
般具有灰度不連續性。據此分為:
− 利用區域間灰度不連續性的邊界方法:
− 利用區域內灰度相似性的基於區域的演演算法:
根據分割過程中處理策略分類:
− 並行演演算法:計算速度比較快
− 序列演演算法:對噪聲的抵抗力比較強
二、邊界分割技術
• 邊緣檢測
邊緣:
• 各類影象中,由於不同物體對電磁波的反射特性不同,在物體與背景、不同
物體的交接處,影象的灰度將發生明顯的變化,在影象中產生了邊緣。
邊緣檢測:
• 利用灰度的變化資訊檢測物體邊緣,得到物體的輪廓,實現影象分割。
• 邊緣檢測是所有基於邊界的分割方式的第一步。
邊緣檢測步驟
① 需要先去噪,進行影象平滑處理
• 平滑模板
• 中值濾波
② 檢測邊緣點:從影象提取邊緣候選點
• 邊緣檢測運算元
③ 邊緣定位:從邊緣候選點中篩選。
• 閾值化處
• 微分運算元
① 梯度對應一階導數,梯度運算元是一階導數運算元
• Roberts 運算元
• Prewitt運算元
• Sobel運算元
② 二階導數運算元:
• LoG運算元

Roberts邊緣檢測運算元是一種利用區域性差分運算元尋找邊緣的運算元


Prewitt運算元對於噪聲較小的階躍形邊界的提取非常有效。



Sobel 運算元具有一定的噪聲抑制能力,檢測效果較為理想,但所得邊緣較粗,至少為兩畫素。
拉普拉斯運算元是無方向性的運算元,它比前面幾個梯度運算元的計算量要小

影響波谷特性的關鍵因素(重要性由大到小):
① 波峰間的間隔:波峰離得越遠,分隔這些模式的機會越好;
② 影象中的噪聲內容:噪聲越大,模式越寬;
③ 目標和背景的相對大小;
④ 光源的均勻性;
⑤ 影象反射性質的均勻性
峰谷法:
• 優點:峰谷法直接利用影象的灰度直方圖,實現簡單,運算量也小
• 缺點:不適用於兩峰值相差極大,有寬且平谷底的影象
• 全域性閾值
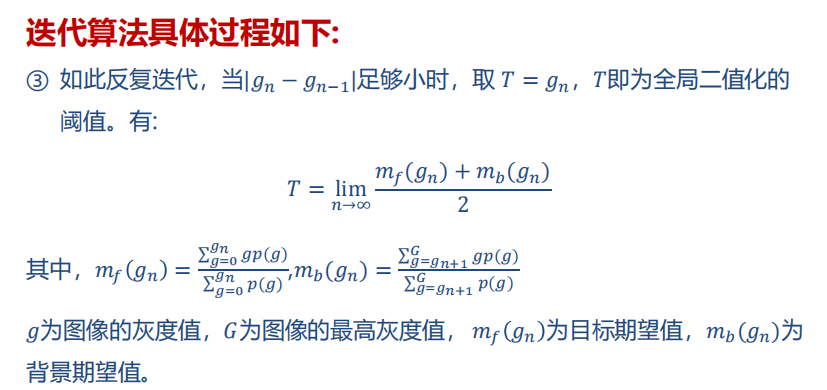
迭代演演算法
• 是一種全域性閾值二值化方法。
• 該方法首先選取一初始閾值
其值取為影象的最大灰度值與最小灰度值的均值,根據該閾值將影象二值化為目標與背景,
• 然後以目標和背景的平均期望值作為新的閾值,對影象重新二值化
• 如此不斷迭代
• 當閾值不再變化時,停止迭代。
一般迭代幾次後即可達到穩定狀態。

hello my world
本文來自部落格園,作者:slowlydance2me,轉載請註明原文連結:https://www.cnblogs.com/slowlydance2me/p/16916491.html