樹莓派(香橙派)通過.NET IoT 操作SPI編寫螢幕驅動 順手做個四足機器人(一)
摘要
這片文章主要是記錄自己的整活過程,涉及到的技術包括.NET IoT, .NET Web, .NET MAUI,框架採用的也是最新的.NET 7。
本人是用的樹莓派Zero 2 W(ubuntu-22.04)進行開發測試,但是.NET IoT庫也有社群張高興提交的香橙派GPIO引腳的對映,香橙派型號對應的驅動。主要預算不夠的.NET開發老哥可以嘗試用香橙派改改程式碼跑跑看,回頭我再實機測試。
.NET IoT操作SPI編寫螢幕驅動
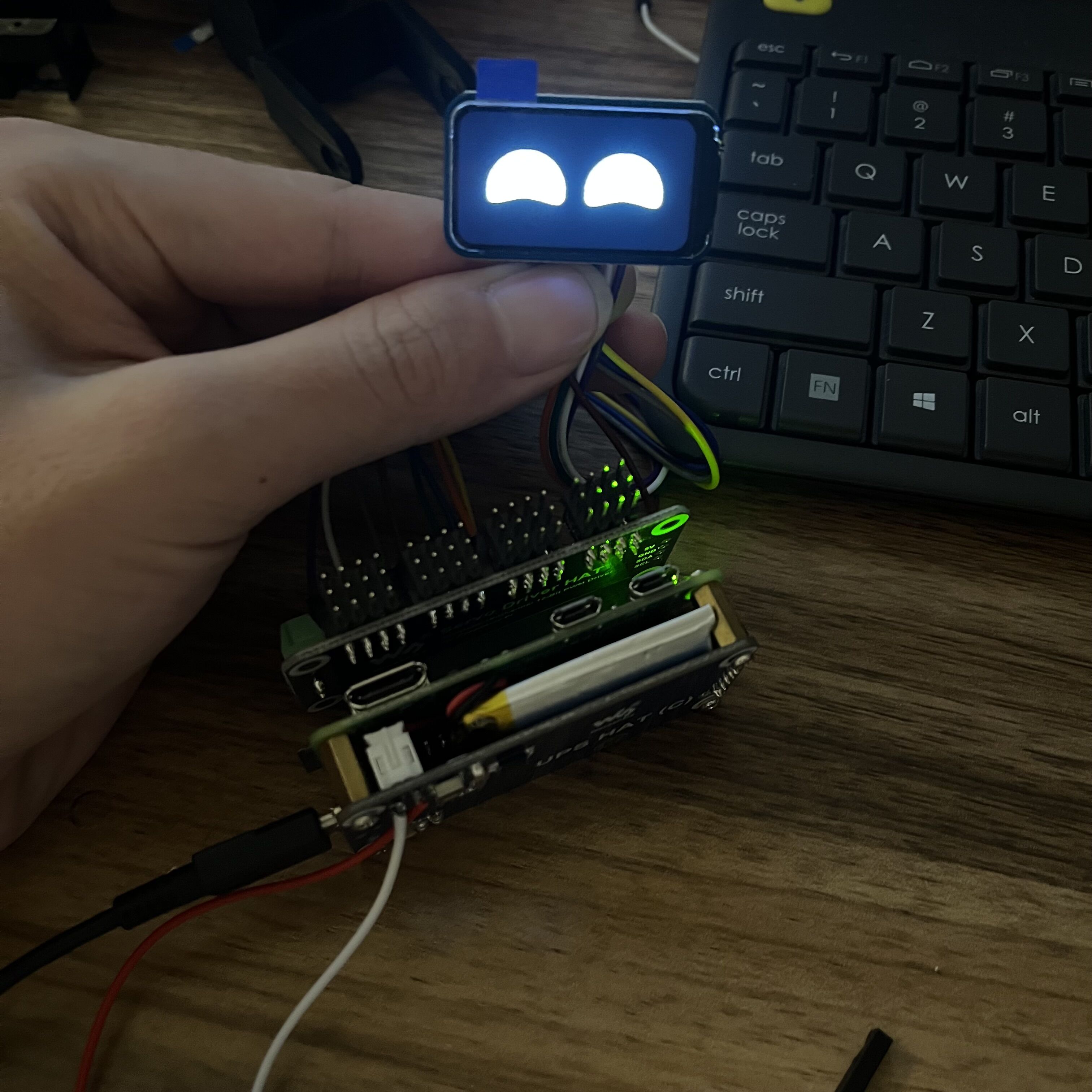
有圖有真相
關於什麼是SPI大家可以先看完張高興的一篇文章溫習下:
張高興的 .NET IoT 入門指南:(四)使用 SPI 進行通訊
在知道什麼是SPI之後,大概應該知道我們要做什麼了,我們買的螢幕通訊協定有很多種,我呢恰好選擇了這個SPI協定的螢幕,廠家的檔案中心,會有詳細介紹。
SPI初始化=>傳輸圖片資料=>螢幕正常顯示

上圖表示我們需要如何傳輸圖片資料,才能正常使用,下面我參照檔案的介紹。
本款LCD使用的內建控制器為ST7789V3,是一款240 x RGB x 320畫素的LCD控制器,而本LCD本身的畫素為172(H)RGB x 320(V),同時由於初始化控制可以初始化為橫屏和豎屏兩種,因此LCD的內部RAM並未完全使用。
該LCD支援12位元,16位元以及18位元每畫素的輸入顏色格式,即RGB444,RGB565,RGB666三種顏色格式,本例程使用RGB565的顏色格式,這也是常用的RGB格式
LCD使用四線SPI通訊介面,這樣可以大大的節省GPIO口,同時通訊是速度也會比較快
我買的螢幕解析度是172 * 320的,支援16位元色,一張圖片傳輸的總資料為172 * 320 * 2位元組。
大家可以參考檔案裡的python程式碼和我的實現進行學習螢幕驅動的簡單編寫,由於我不是專業的嵌入式我就不展開了。
螢幕晶片驅動程式的建構函式
public ST7789V3(int dataCommandPin,
SpiDevice sensor,
int resetPin = -1,
PwmChannel? pwmBacklight = null,
PinNumberingScheme pinNumberingScheme = PinNumberingScheme.Logical,
GpioController? gpioController = null,
bool shouldDispose = true)
{
if (dataCommandPin < 0)
{
throw new ArgumentOutOfRangeException();
}
_dataCommandPin = dataCommandPin;
_pwmBacklight = pwmBacklight;
_pwmBacklight?.Start();
_sensor = sensor ?? throw new ArgumentNullException(nameof(sensor));
_gpio = gpioController ?? new GpioController(pinNumberingScheme);
_resetPin = resetPin;
_shouldDispose = shouldDispose || gpioController is null;
Initialize();
}
資料傳輸的程式碼如下:
public void SpiWrite(bool isData, ReadOnlySpan<byte> writeData)
{
Console.WriteLine($"writeData length:{writeData.Length}");
_gpio.Write(_dataCommandPin, isData ? PinValue.High : PinValue.Low);
if (writeData.Length > 4096)
{
for (int i = 0; i < 26; i++)
{
var query = writeData[(i * 4096)..((i * 4096) + 4096)];
_sensor.Write(query);
}
var dataLcdList1 = writeData[(26 * 4096)..110080];
_sensor.Write(dataLcdList1);
}
else
{
_sensor.Write(writeData);
}
}
SPI對資料一次傳輸的長度有限制,也就是4096位元組,所以大家要注意手動分段傳輸。
目前驅動部分測試是OK的,但是由於圖片資料轉換到RGB565的時候會有問題,導致有些彩色不太正常,不過黑白ok,就暫時這樣使用了。
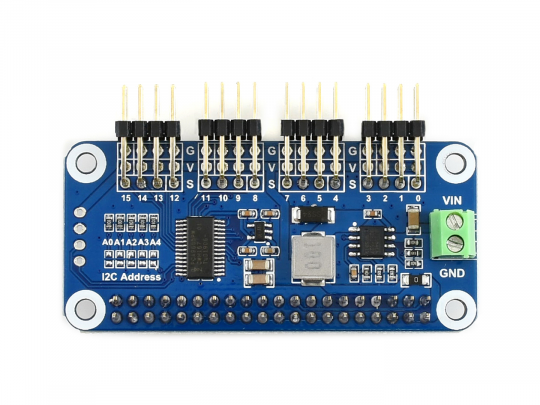
.NET IoT操作I2C控制16路舵機驅動器
這個舵機驅動部分,社群已經有貢獻了,所以我直接通過.NET IoT進行一次封裝就可以控制16路舵機驅動器了,有興趣的可以看下原始碼和我COPY官方的測試程式。
伺服器端搭建
先來張架構圖:
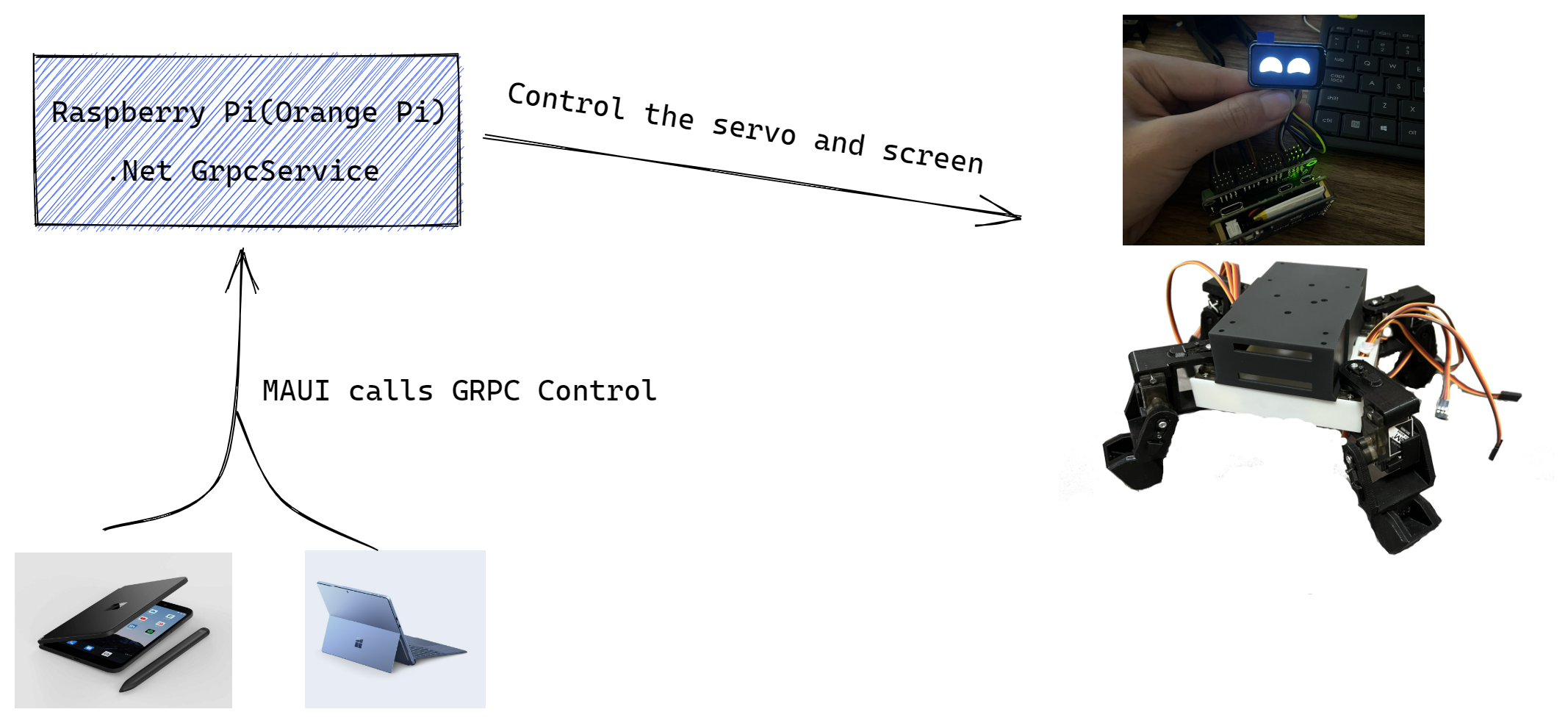
樹莓派主要是用來跑用.NET編寫的web服務,然後呼叫上面提到的驅動驅動螢幕和舵機驅動板,進行相關硬體的操作。
協定檔案主要定義了播放圖片到螢幕,播放視訊到螢幕,四足機器人的舵機控制。
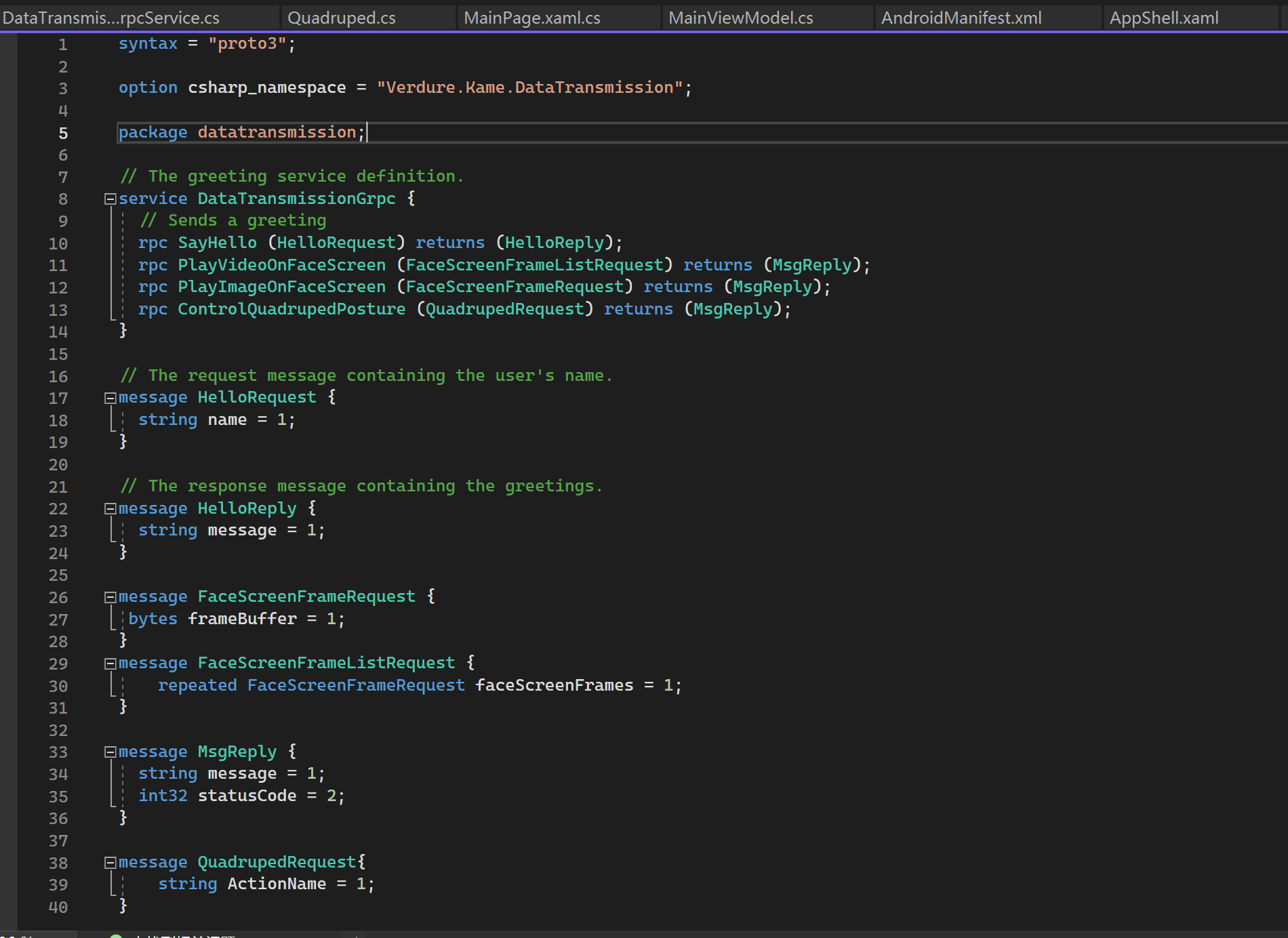
伺服器端很簡單,只做簡單的資料轉發,不處理資料,資料處理放在使用者端也就是MAUI程式裡進行。
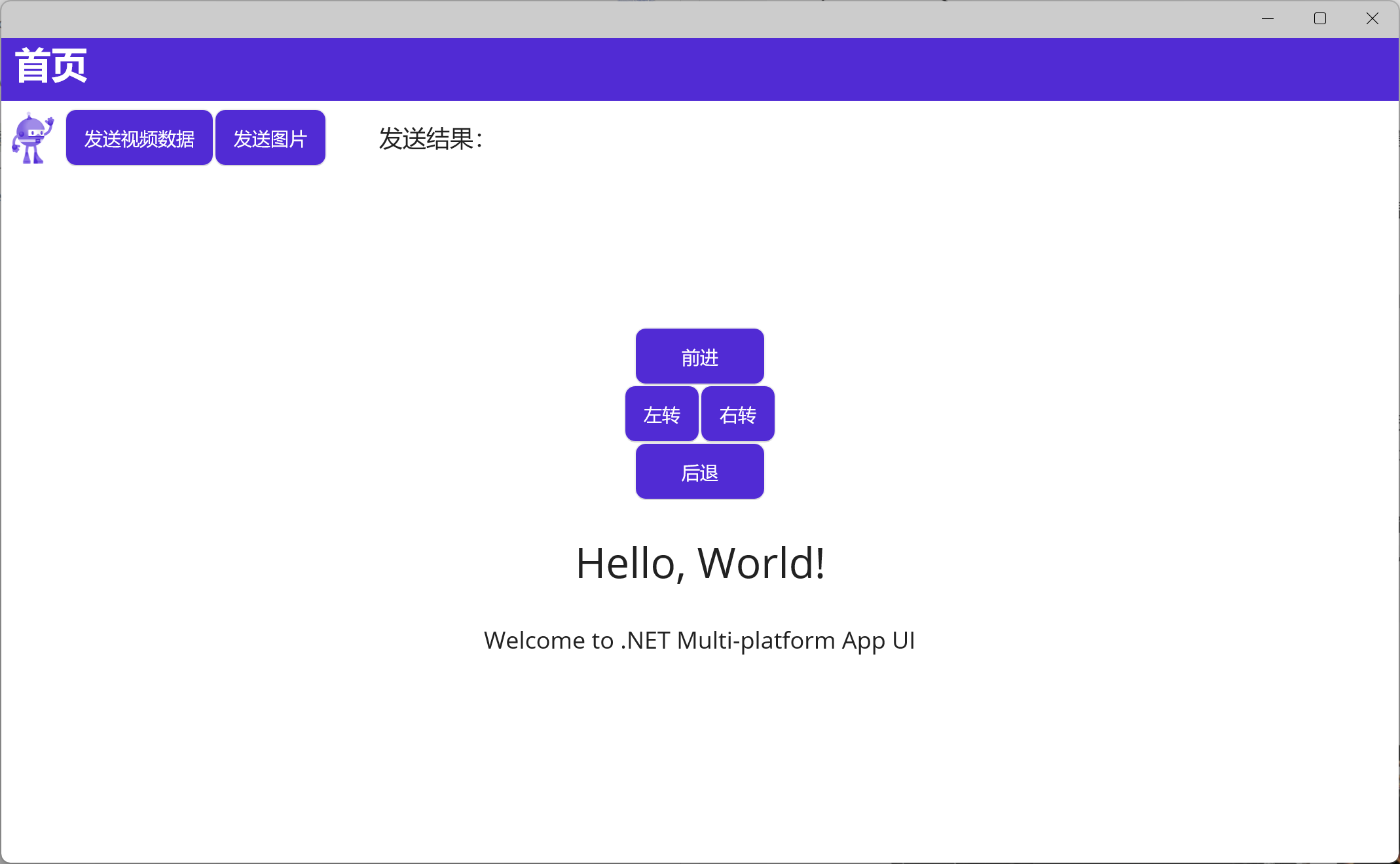
使用者端搭建
使用者端採用MAUI框架,用到了MAUI對應的windows的特有的庫,比如opencvsharp,MAUI使用者端的功能目前比較單一,還是等我測試完畢,再加新功能吧。
總結
對於使用.NET進行全場景的開發進行了實踐,發現其實還是大有可為的,能夠很快的實現一些功能,而不用再花很多的時間學習其他的技術棧。但是MAUI由於平臺的不同,有些功能還是需要針對特定的平臺進行單獨處理,這個就增加了開發的複雜性。
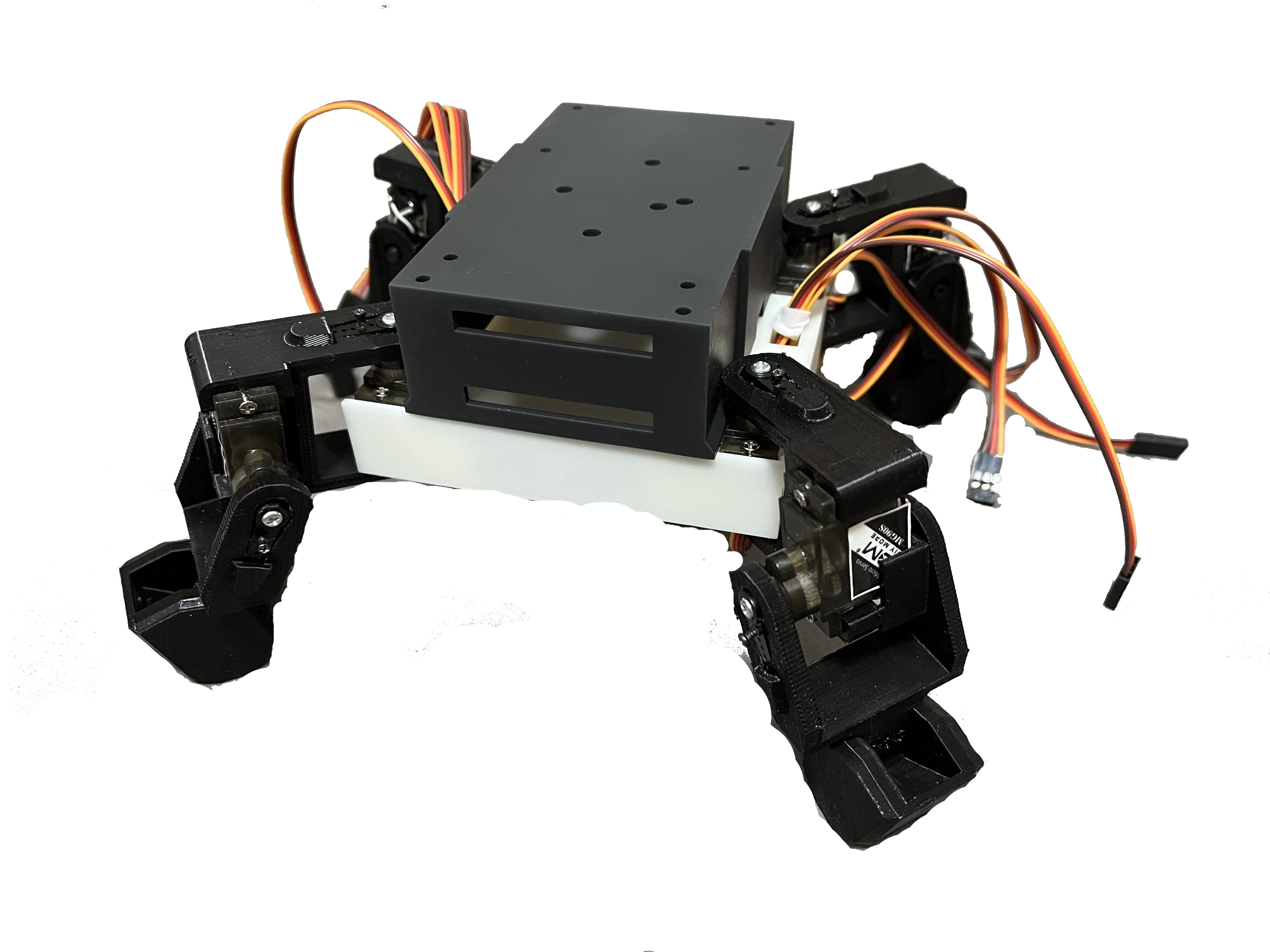
來張四足機器人的全圖吧,程式碼是實現完了,可惜因為疫情,有些零件快遞收不到,先來張實體圖吧,到時候會把螢幕也放上去,有比較感興趣的話可以關注我B站賬號,到時候放視訊上去。
推薦專案
nanoFramework IoT.Device Library repository