使用LabVIEW實現基於pytorch的DeepLabv3影象語意分割
前言
今天我們一起來看一下如何使用LabVIEW實現語意分割。
一、什麼是語意分割
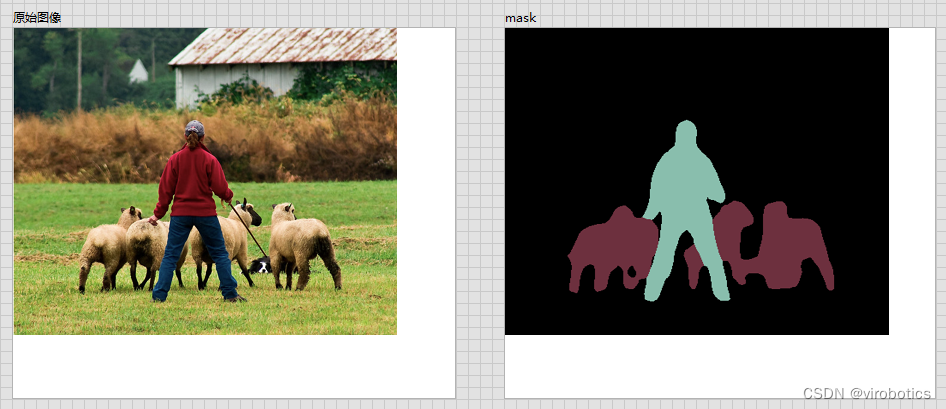
影象語意分割(semantic segmentation),從字面意思上理解就是讓計算機根據影象的語意來進行分割,例如讓計算機在輸入下面左圖的情況下,能夠輸出右圖。語意在語音識別中指的是語音的意思,在影象領域,語意指的是影象的內容,對圖片意思的理解,比如下圖的語意就是一個人牽著四隻羊;分割的意思是從畫素的角度分割出圖片中的不同物件,對原圖中的每個畫素都進行標註,比如下圖中淺黃色代表人,藍綠色代表羊。語意分割任務就是將圖片中的不同類別,用不同的顏色標記出來,每一個類別使用一種顏色。常用於醫學影象,衛星影象,無人車駕駛,機器人等領域。
-
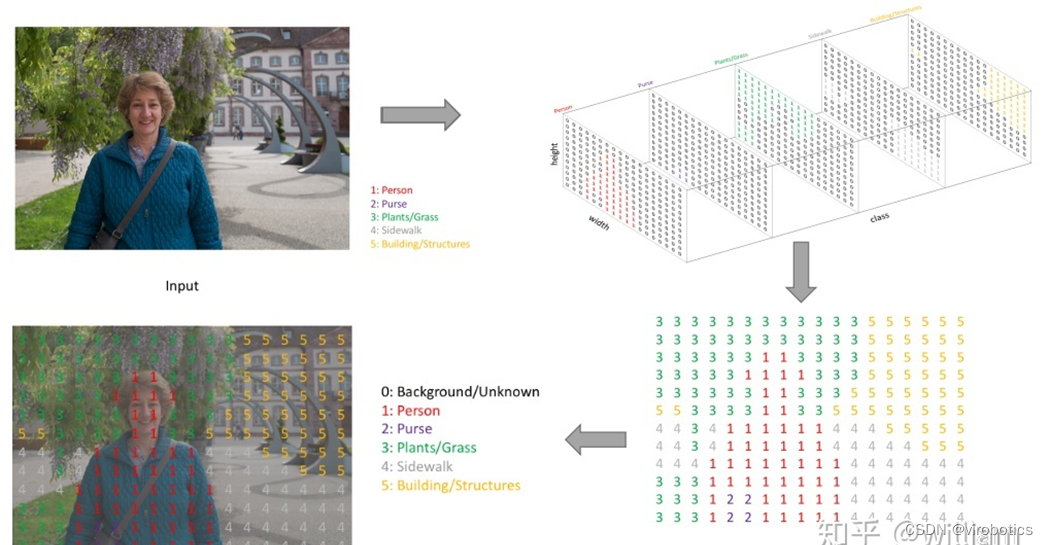
如何做到將畫素點上色呢?
語意分割的輸出和影象分類網路類似,影象分類類別數是一個一維的one hot 矩陣。例如:三分類的[0,1,0]。語意分割任務最後的輸出特徵圖是一個三維結構,大小與原圖類似,其中通道數是類別數,每個通道所標記的畫素點,是該類別在影象中的位置,最後通過argmax 取每個通道有用畫素 合成一張影象,用不同顏色表示其類別位置。 語意分割任務其實也是分類任務中的一種,他不過是對每一個畫素點進行細分,找到每一個畫素點所述的類別。 這就是語意分割任務啦~
二、什麼是deeplabv3
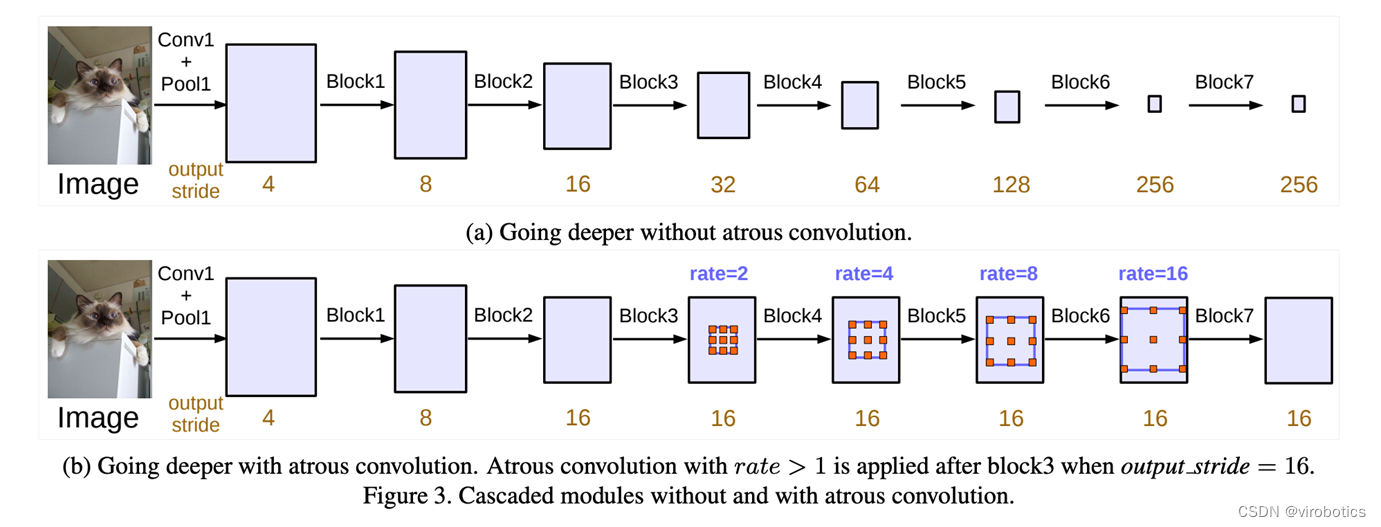
DeepLabv3是一種語意分割架構,它在DeepLabv2的基礎上進行了一些修改。為了處理在多個尺度上分割物件的問題,設計了在級聯或並行中採用多孔折積的模組,通過採用多個多孔速率來捕獲多尺度上下文。此外,來自 DeepLabv2 的 Atrous Spatial Pyramid Pooling模組增加了編碼全域性上下文的影象級特徵,並進一步提高了效能。
三、LabVIEW呼叫DeepLabv3實現影象語意分割
1、模型獲取及轉換
-
安裝pytorch和torchvision
-
獲取torchvision中的模型:deeplabv3_resnet101(我們獲取預訓練好的模型):
original_model = models.segmentation.deeplabv3_resnet101(pretrained=True)
-
轉onnx


1 def get_pytorch_onnx_model(original_model): 2 # define the directory for further converted model save 3 onnx_model_path = dirname 4 # define the name of further converted model 5 onnx_model_name = "deeplabv3_resnet101.onnx" 6 7 # create directory for further converted model 8 os.makedirs(onnx_model_path, exist_ok=True) 9 10 # get full path to the converted model 11 full_model_path = os.path.join(onnx_model_path, onnx_model_name) 12 13 # generate model input 14 generated_input = Variable( 15 torch.randn(1, 3, 448, 448) 16 ) 17 18 # model export into ONNX format 19 torch.onnx.export( 20 original_model, 21 generated_input, 22 full_model_path, 23 verbose=True, 24 input_names=["input"], 25 output_names=["output",'aux'], 26 opset_version=11 27 ) 28 29 return full_model_path
完整獲取及模型轉換python程式碼如下:
1 import os 2 import torch 3 import torch.onnx 4 from torch.autograd import Variable 5 from torchvision import models 6 import re 7 8 dirname, filename = os.path.split(os.path.abspath(__file__)) 9 print(dirname) 10 11 def get_pytorch_onnx_model(original_model): 12 # define the directory for further converted model save 13 onnx_model_path = dirname 14 # define the name of further converted model 15 onnx_model_name = "deeplabv3_resnet101.onnx" 16 17 # create directory for further converted model 18 os.makedirs(onnx_model_path, exist_ok=True) 19 20 # get full path to the converted model 21 full_model_path = os.path.join(onnx_model_path, onnx_model_name) 22 23 # generate model input 24 generated_input = Variable( 25 torch.randn(1, 3, 448, 448) 26 ) 27 28 # model export into ONNX format 29 torch.onnx.export( 30 original_model, 31 generated_input, 32 full_model_path, 33 verbose=True, 34 input_names=["input"], 35 output_names=["output",'aux'], 36 opset_version=11 37 ) 38 39 return full_model_path 40 41 42 def main(): 43 # initialize PyTorch ResNet-101 model 44 original_model = models.segmentation.deeplabv3_resnet101(pretrained=True) 45 46 # get the path to the converted into ONNX PyTorch model 47 full_model_path = get_pytorch_onnx_model(original_model) 48 print("PyTorch ResNet-101 model was successfully converted: ", full_model_path) 49 50 51 if __name__ == "__main__": 52 main()
我們會發現,基於pytorch的DeepLabv3模型獲取和之前的mask rcnn模型大同小異。
2、關於deeplabv3_resnet101
我們使用的模型是:deeplabv3_resnet101,該模型返回兩個張量,與輸入張量相同,但有21個classes。輸出[「out」]包含語意掩碼,而輸出[「aux」]包含每畫素的輔助損失值。在推理模式中,輸出[‘aux]沒有用處。因此,輸出「out」形狀為(N、21、H、W)。我們在轉模型的時候設定H,W為448,N一般為1;
我們的模型是基於VOC2012資料集 VOC2012資料集分為20類,包括背景為21類,分別如下:
-
人 :人
-
動物:鳥、貓、牛、狗、馬、羊
-
車輛:飛機、自行車、船、巴士、汽車、摩托車、火車
-
室內:瓶、椅子、餐桌、盆栽植物、沙發、電視/監視器
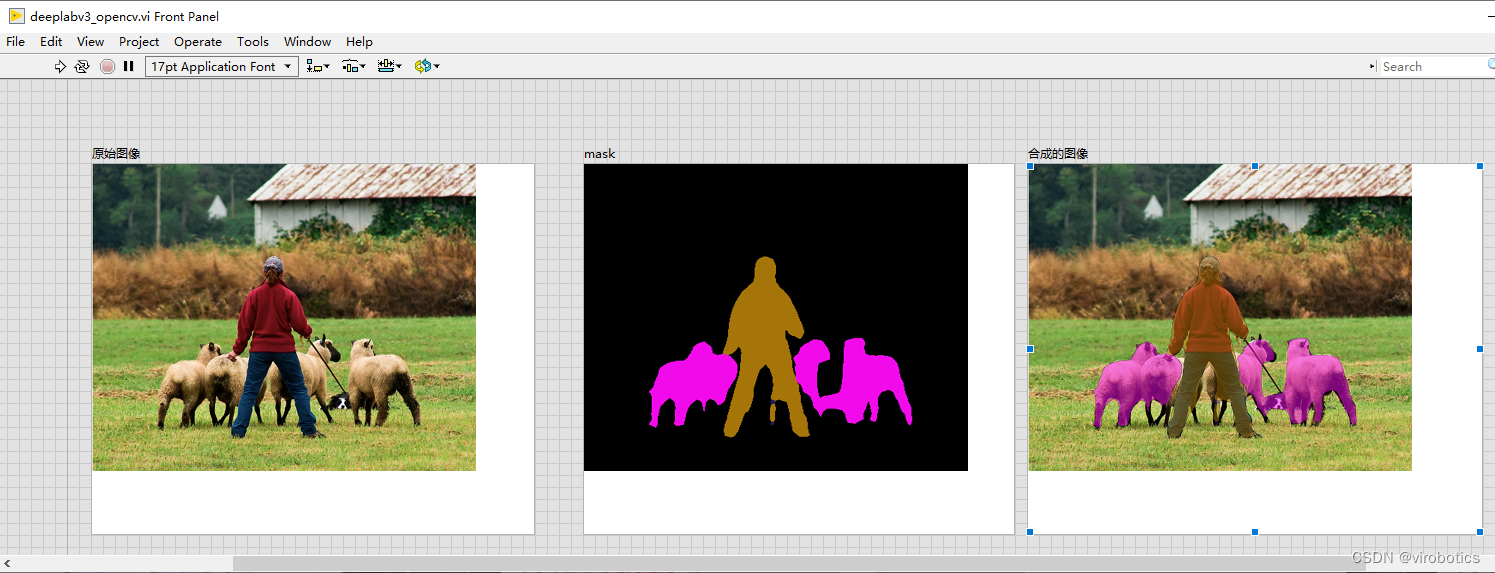
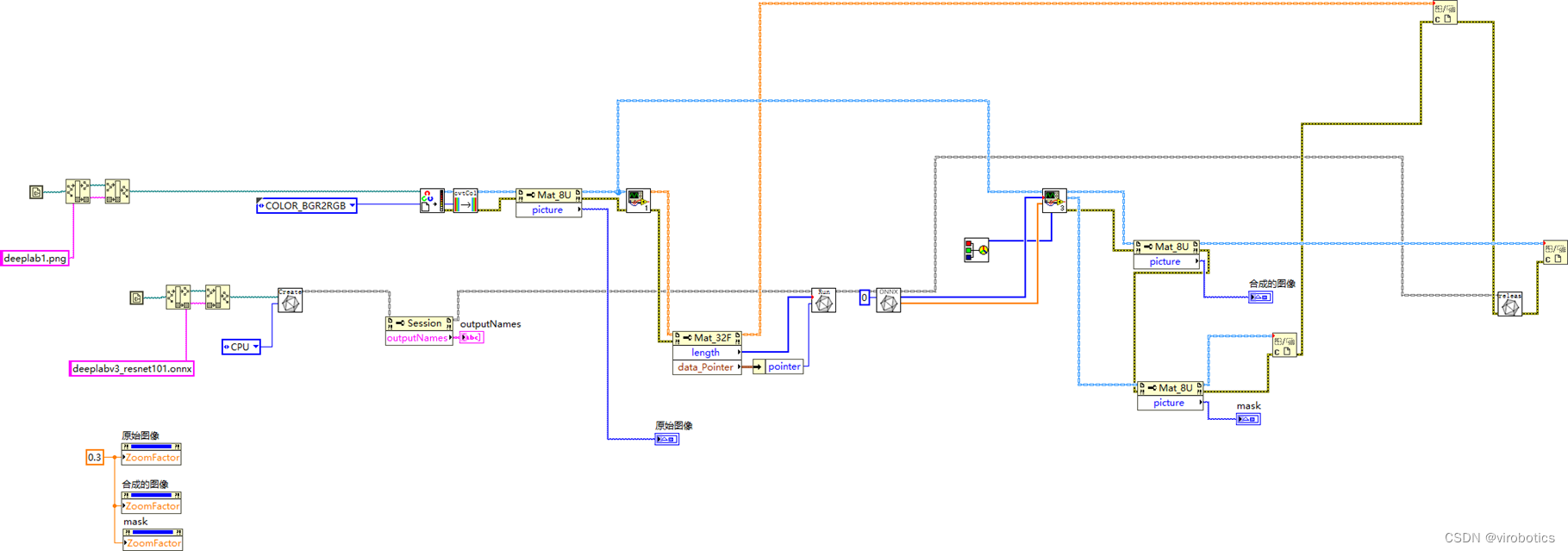
3、LabVIEW opencv dnn呼叫 deeplabv3 實現影象語意分割(deeplabv3_opencv.vi)
deeplabv3模型可以使用OpenCV dnn去載入的,也可以使用onnxruntime載入推理,所以我們分兩種方式給大家介紹LabVIEW呼叫deeplabv3實現影象語意分割。
-
opencv dnn 呼叫onnx模型並選擇
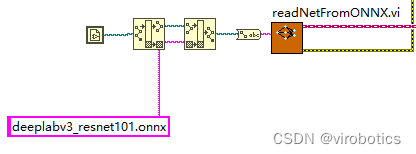
-
影象預處理 最終還是採用了比較中規中矩的處理方式
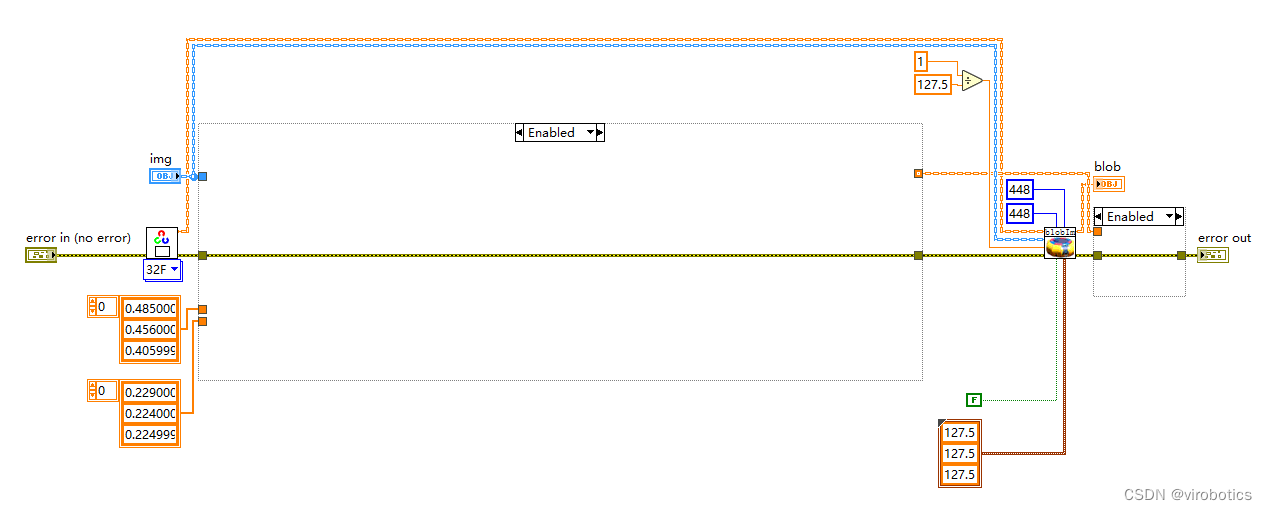
-
執行推理
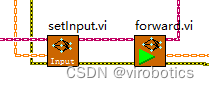
-
後處理並實現範例分割 因為後處理內容較多,所以直接封裝為了一個子VI, deeplabv3_postprocess.vi,因為Labview沒有專門的切片函數,所以會稍慢一些,所以接下來還會開發針對後處理和矩陣有關的函數,加快處理結果。
-
整體的程式框架如下:
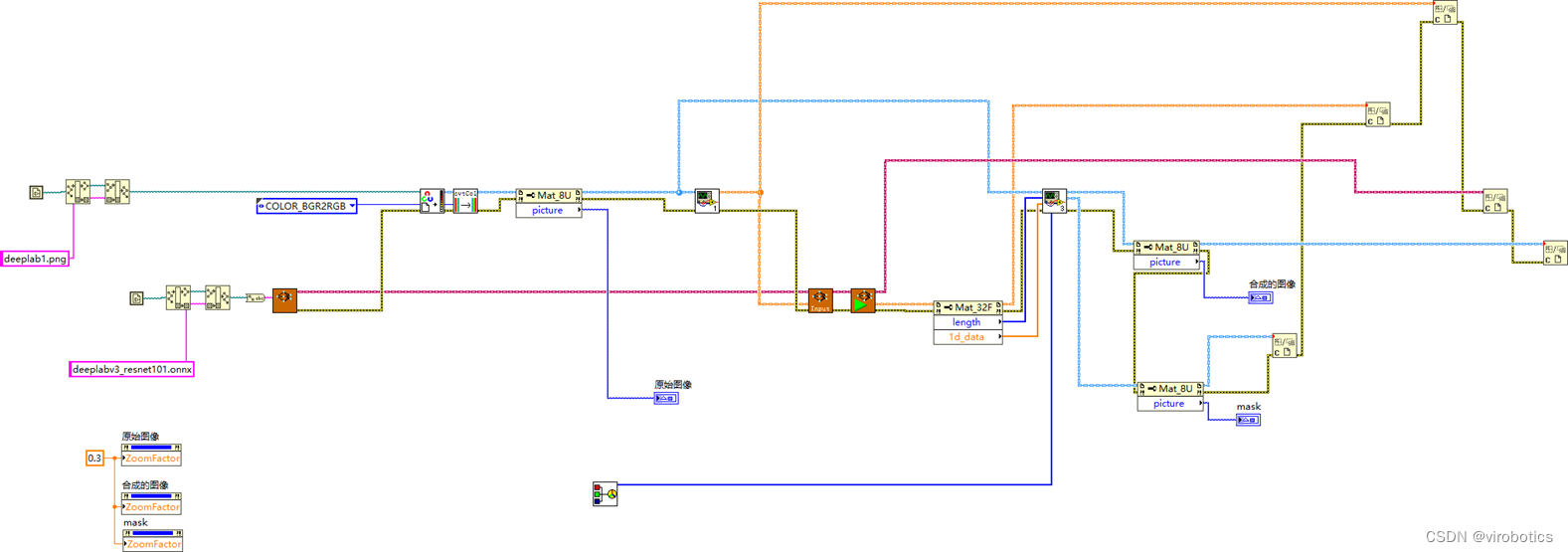
-
語意分割結果如下:
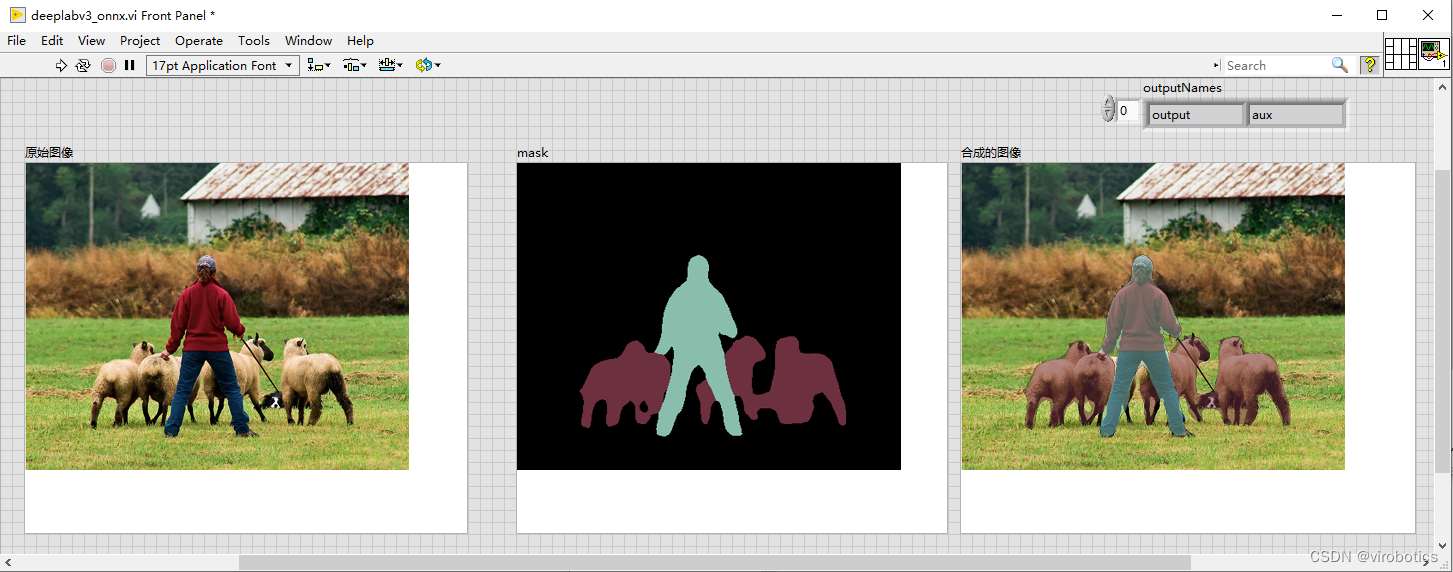
4、LabVIEW onnxruntime呼叫 deeplabv3實現影象語意分割 (deeplabv3_onnx.vi)
-
整體的程式框架如下:
-
語意分割結果如下:
5、LabVIEW onnxruntime呼叫 deeplabv3 使用TensorRT加速模型實現影象語意分割(deeplabv3_onnx_camera.vi)
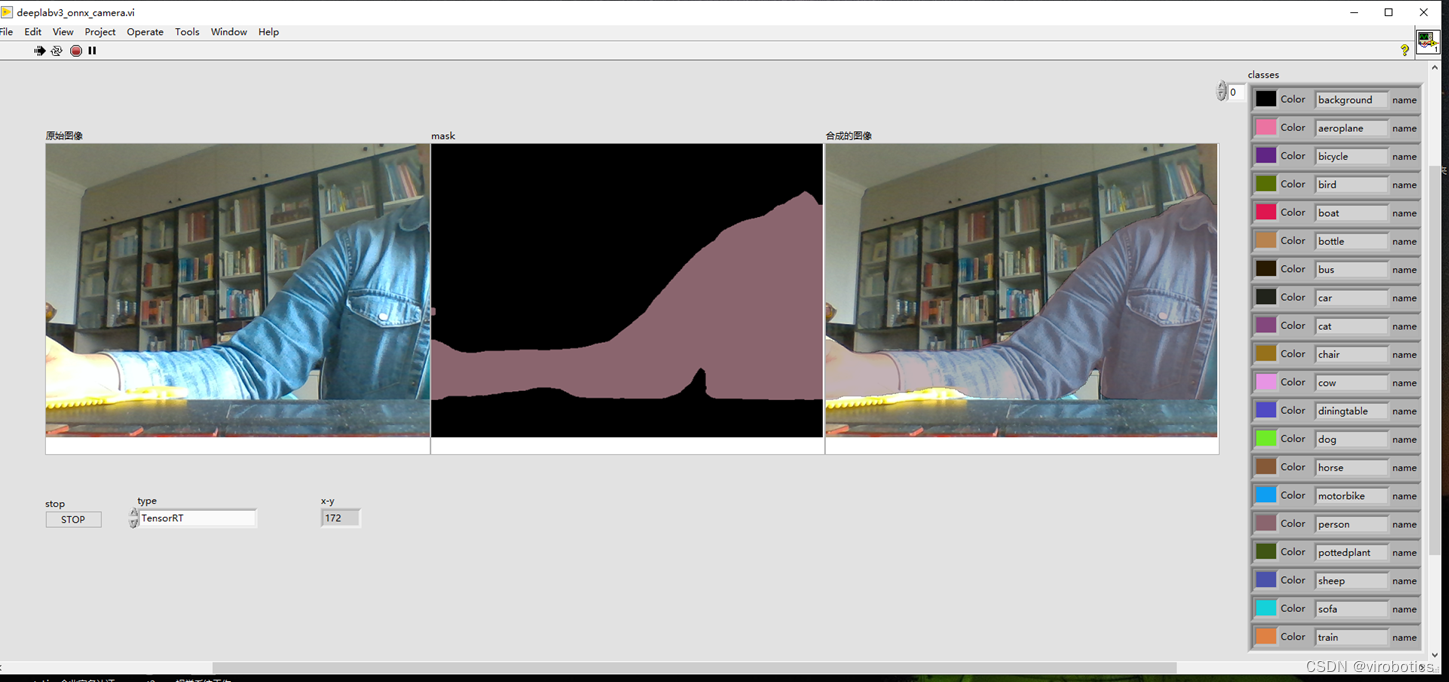
如上圖所示,可以看到可以把人和背景完全分割開來,使用TensorRT加速推理,速度也比較快。
四、deeplabv3訓練自己的資料集
訓練可參考:https://github.com/pytorch/vision
總結
以上就是今天要給大家分享的內容。大家可關注微信公眾號: VIRobotics,回覆關鍵字:DeepLabv3影象語意分割原始碼 獲取本次分享內容的完整專案原始碼及模型。
如果有問題可以在評論區裡討論,提問前請先點贊支援一下博主哦,如您想要探討更多關於LabVIEW與人工智慧技術,歡迎加入我們的技術交流群:705637299。