驅動開發:核心封裝WSK網路通訊介面
本章LyShark將帶大家學習如何在核心中使用標準的Socket通訊端通訊介面,我們都知道Windows應用層下可直接呼叫WinSocket來實現網路通訊,但在核心模式下應用層API介面無法使用,核心模式下有一套專有的WSK通訊介面,我們對WSK進行封裝,讓其與應用層呼叫規範保持一致,並實現核心與核心直接通過Socket通訊的案例。
當然在早期如果需要實現網路通訊一般都會採用TDI框架,但在新版本Windows10系統上雖然依然可以使用TDI介面,但是LyShark並不推薦使用,因為微軟已經對介面擱置了,為了使WSK通訊更加易用,我們需要封裝核心層中的通訊API,新建LySocket.hpp標頭檔案,該檔案中封裝了WSK通訊API介面,其封裝格式與應用層介面保持了高度一致,當需要在核心中使用Socket通訊時可直接引入本檔案。
我們需要使用WDM驅動程式,並設定以下引數。
- 設定屬性 -> 聯結器 -> 輸入-> 附加依賴 -> $(DDK_LIB_PATH)\Netio.lib
- 設定屬性 -> C/C++ -> 常規 -> 設定 警告等級2級 (警告視為錯誤關閉)
設定好以後,我們就開始吧,先來看看伺服器端如何實現!
對於伺服器端來說,驅動通訊必須保證伺服器端開啟多執行緒來處理非同步請求,不然驅動載入後系統會處於等待狀態,而一旦等待則系統將會卡死,那麼對於伺服器端DriverEntry入口說我們不能讓其等待,必須使用PsCreateSystemThread來啟用系統執行緒,該函數屬於WDM的一部分,官方定義如下;
NTSTATUS PsCreateSystemThread(
[out] PHANDLE ThreadHandle,
[in] ULONG DesiredAccess,
[in, optional] POBJECT_ATTRIBUTES ObjectAttributes,
[in, optional] HANDLE ProcessHandle,
[out, optional] PCLIENT_ID ClientId,
[in] PKSTART_ROUTINE StartRoutine,
[in, optional] PVOID StartContext
);
我們使用PsCreateSystemThread函數開闢執行緒TcpListenWorker線上程內部執行如下流程啟動驅動伺服器端,由於我們自己封裝實現了標準介面組,所以使用起來幾乎與應用層無任何差異了。
- CreateSocket 建立通訊端
- Bind 繫結通訊端
- Accept 等待接收請求
- Receive 用於接收返回值
- Send 用於傳送返回值
// 署名權
// right to sign one's name on a piece of work
// PowerBy: LyShark
// Email: [email protected]
#include "LySocket.hpp"
PETHREAD m_EThread = NULL;
// 執行緒函數
// PowerBy: LySHark
VOID TcpListenWorker(PVOID Context)
{
WSK_SOCKET* paccept_socket = NULL;
SOCKADDR_IN LocalAddress = { 0 };
SOCKADDR_IN RemoteAddress = { 0 };
NTSTATUS status = STATUS_UNSUCCESSFUL;
// 建立通訊端
PWSK_SOCKET TcpSocket = CreateSocket(AF_INET, SOCK_STREAM, IPPROTO_TCP, WSK_FLAG_LISTEN_SOCKET);
if (TcpSocket == NULL)
{
return;
}
// 設定繫結地址
LocalAddress.sin_family = AF_INET;
LocalAddress.sin_addr.s_addr = INADDR_ANY;
LocalAddress.sin_port = HTON_SHORT(8888);
status = Bind(TcpSocket, (PSOCKADDR)&LocalAddress);
if (!NT_SUCCESS(status))
{
return;
}
// 迴圈接收
while (1)
{
CHAR* read_buffer = (CHAR*)ExAllocatePoolWithTag(NonPagedPool, 2048, "read");
paccept_socket = Accept(TcpSocket, (PSOCKADDR)&LocalAddress, (PSOCKADDR)&RemoteAddress);
if (paccept_socket == NULL)
{
continue;
}
// 接收資料
memset(read_buffer, 0, 2048);
int read_len = Receive(paccept_socket, read_buffer, 2048, 0);
if (read_len != 0)
{
DbgPrint("[核心A] => %s \n", read_buffer);
// 傳送資料
char send_buffer[2048] = "Hi, lyshark.com B";
Send(paccept_socket, send_buffer, strlen(send_buffer), 0);
// 接收確認包
memset(read_buffer, 0, 2048);
Receive(paccept_socket, read_buffer, 2, 0);
}
// 清理堆
if (read_buffer != NULL)
{
ExFreePool(read_buffer);
}
// 關閉當前通訊端
if (paccept_socket)
{
CloseSocket(paccept_socket);
}
}
if (TcpSocket)
{
CloseSocket(TcpSocket);
}
PsTerminateSystemThread(STATUS_SUCCESS);
return;
}
// 關閉通訊端
VOID UnDriver(PDRIVER_OBJECT driver)
{
WSKCleanup();
KeWaitForSingleObject(m_EThread, Executive, KernelMode, FALSE, NULL);
if (m_EThread != NULL)
{
ObDereferenceObject(m_EThread);
}
}
NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath)
{
DbgPrint("hello lyshark.com \n");
// 初始化
WSKStartup();
HANDLE hThread = NULL;
NTSTATUS status = STATUS_UNSUCCESSFUL;
// 建立系統執行緒
status = PsCreateSystemThread(&hThread, THREAD_ALL_ACCESS, NULL, NULL, NULL, TcpListenWorker, NULL);
if (!NT_SUCCESS(status))
{
return status;
}
// 獲取執行緒EProcess結構
status = ObReferenceObjectByHandle(hThread, THREAD_ALL_ACCESS, NULL, KernelMode, (PVOID*)&m_EThread, NULL);
if (NT_SUCCESS(status) == FALSE)
{
return status;
}
ZwClose(hThread);
Driver->DriverUnload = UnDriver;
return STATUS_SUCCESS;
}
對於使用者端來說,只需要建立通訊端並連線到指定地址即可,這個過程大體上可以總結為如下;
- CreateSocket 建立通訊端
- Bind 繫結通訊端
- Connect 連結伺服器端驅動
- Send 傳送資料到伺服器端
- Receive 接收資料到伺服器端
// 署名權
// right to sign one's name on a piece of work
// PowerBy: LyShark
// Email: [email protected]
#include "LySocket.hpp"
VOID UnDriver(PDRIVER_OBJECT driver)
{
// 解除安裝並關閉Socket庫
WSKCleanup();
}
NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath)
{
DbgPrint("hello lyshark.com \n");
// 初始化
WSKStartup();
NTSTATUS status = STATUS_SUCCESS;
SOCKADDR_IN LocalAddress = { 0, };
SOCKADDR_IN RemoteAddress = { 0, };
// 建立通訊端
PWSK_SOCKET TcpSocket = CreateSocket(AF_INET, SOCK_STREAM, IPPROTO_TCP, WSK_FLAG_CONNECTION_SOCKET);
if (TcpSocket == NULL)
{
Driver->DriverUnload = UnDriver;
return STATUS_SUCCESS;
}
LocalAddress.sin_family = AF_INET;
LocalAddress.sin_addr.s_addr = INADDR_ANY;
status = Bind(TcpSocket, (PSOCKADDR)&LocalAddress);
// 繫結失敗則關閉驅動
if (!NT_SUCCESS(status))
{
CloseSocket(TcpSocket);
Driver->DriverUnload = UnDriver;
return STATUS_SUCCESS;
}
// 初始化伺服器端地址與埠資訊
ULONG address[4] = { 127, 0, 0, 1 };
RemoteAddress.sin_family = AF_INET;
RemoteAddress.sin_addr.s_addr = change_uint(address[0], address[1], address[2], address[3]);
RemoteAddress.sin_port = HTON_SHORT(8888);
status = Connect(TcpSocket, (PSOCKADDR)&RemoteAddress);
// 連線伺服器端,如果失敗則關閉驅動
if (!NT_SUCCESS(status))
{
CloseSocket(TcpSocket);
Driver->DriverUnload = UnDriver;
return STATUS_SUCCESS;
}
// 傳送資料
char send_buffer[2048] = "hello lyshark.com A";
Send(TcpSocket, send_buffer, strlen(send_buffer), 0);
// 接收資料
CHAR* read_buffer = (CHAR*)ExAllocatePoolWithTag(NonPagedPool, 2048, "read");
memset(read_buffer, 0, 1024);
Receive(TcpSocket, read_buffer, 2048, 0);
DbgPrint("[核心B] => %s \n", read_buffer);
// 傳送確認包
Send(TcpSocket, "ok", 2, 0);
// 釋放記憶體
ExFreePool(read_buffer);
CloseSocket(TcpSocket);
Driver->DriverUnload = UnDriver;
return STATUS_SUCCESS;
}
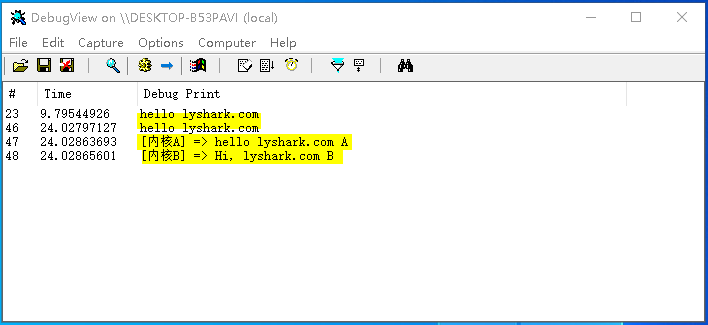
編譯兩個驅動程式,首先執行server.sys驅動,執行後該驅動會在後臺等待使用者端連線,接著執行client.sys螢幕上可輸出如下提示,說明通訊已經建立了。
文章出處:https://www.cnblogs.com/LyShark/p/16850992.html
版權宣告:本部落格文章與程式碼均為學習時整理的筆記,文章 [均為原創] 作品,轉載請 [新增出處] ,您新增出處是我創作的動力!
轉載文章請遵守《中華人民共和國著作權法》相關法律規定或遵守《署名CC BY-ND 4.0國際》規範,合理合規攜帶原創出處轉載,如果不攜帶文章出處,並惡意轉載多篇原創文章被本人發現,本人保留起訴權!