【近似最近鄰搜尋】在茫茫點集中,怎麼找到你的鄰居
一、背景
我們從最最最簡單的場景開始,假設在一個二維平面上,現有N個點,如下圖所示
現在給你一個點,求K個最近的點(歐式距離),如下圖所示

肉眼很容易可以看出,以query點為中心畫個圓,慢慢往外擴充套件,直到包含K個點,然後這K個點就是最近的點。
看起來很容易,但這得給演演算法實現個眼睛啊!
二、暴力解法
這裡需要遍歷所有的N個點跟query點分別求個距離,然後找出K個最相近的點。
咱們專注於這個演演算法本身,假設距離計算的複雜度為1,那麼暴力解法的複雜度為:N + NlogK
假設N很大,在沒有考慮距離計算的複雜度前提下,其實這複雜度已經很高了。那如果是單機,估計實現不了線上實時計算了,有沒有辦法解決呢?
三、分散式解法
把點隨機分佈到不同機器上,然後求解的時候每臺機器都算個top K出來,再合併。如下圖所示:

其實這樣整體複雜度並沒有變化,只是利用機器資源換取時間,理論上只要機器夠多,耗時還是能降低很多的。
如果沒有很多機器資源,可以考慮下更優的解法。
四、分散式解法優化——IVF
既然都已經把N個點劃分成A(3)個區域了,劃分方法能否考慮下距離?比如最簡單的按距離劃分,如圖所示:
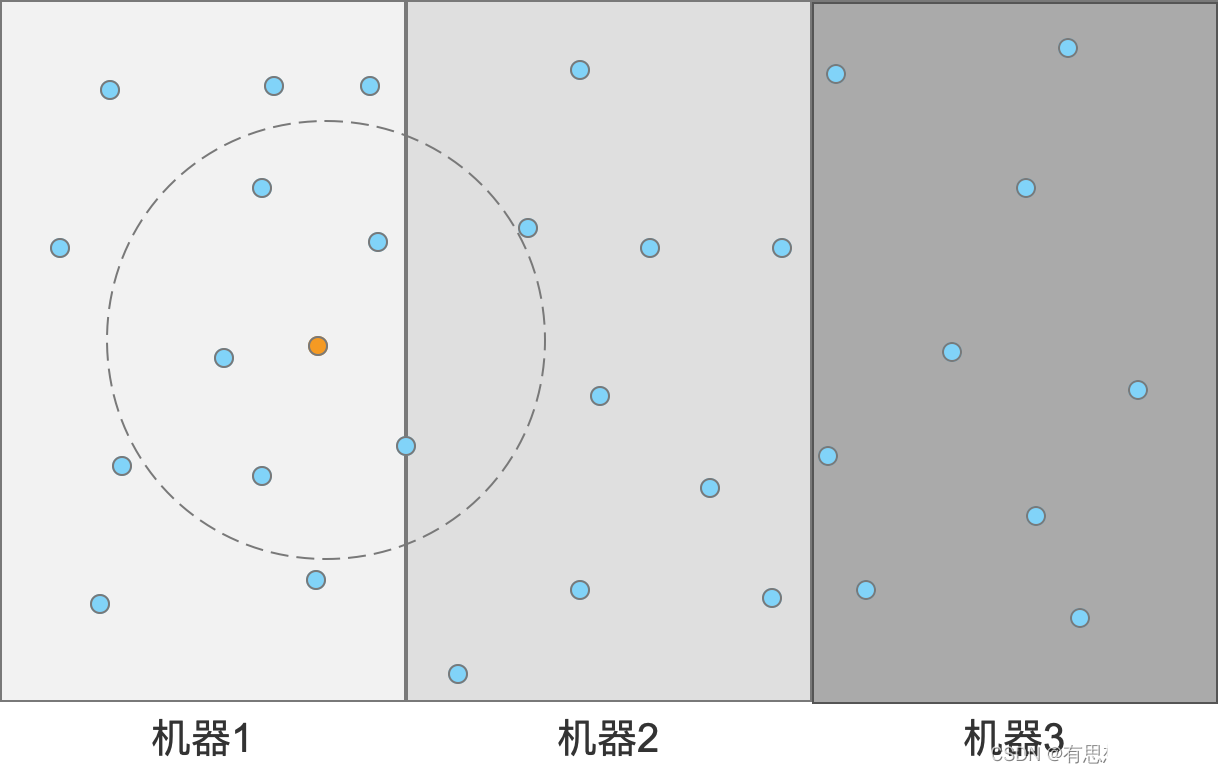
這時我們在檢索的時候,只需要在最近的B(>A=3)個區域暴力檢索就行了。
如果A=3,B=1,那麼複雜度就是: (N+NlogK)/3,這個複雜度是有很大的降低的,但是會有一個缺點,精度有所降低。如果上圖所示,劃分後的結果,會導致一個點出錯~
實際構建區域步驟
- 對所有點集合抽樣一份小的集合。
- 利用聚類演演算法(一般是Kmean)得出A個聚類中心點。
- 把所有點都按距離分配到每個聚類中心,得到A個點集合。
實際檢索步驟
- 在A個聚類中心點中,暴力找出B個最近的聚類中心點
- 只在B個聚類中心點所屬點集中,暴力檢索最近的top K個點
實際複雜度
(N + NlogK)B/A + A
A為聚類中心個數,B為檢索查詢的聚類中心數
雖然這種方法已經大大降低了複雜度,但還有更有的方式嗎?
五、圖論演演算法——NSW
其實就是把N個點按一定規則連邊,構成一個有向圖,如下圖所示:
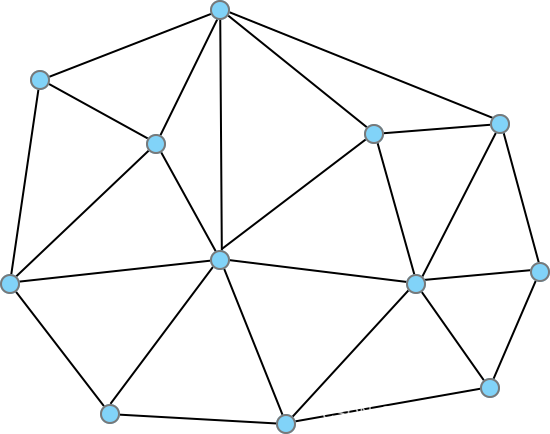
藍色點為點集,黑色邊為有向邊,具體如何構造這個有向邊後邊再說,先說下檢索流程
檢索流程
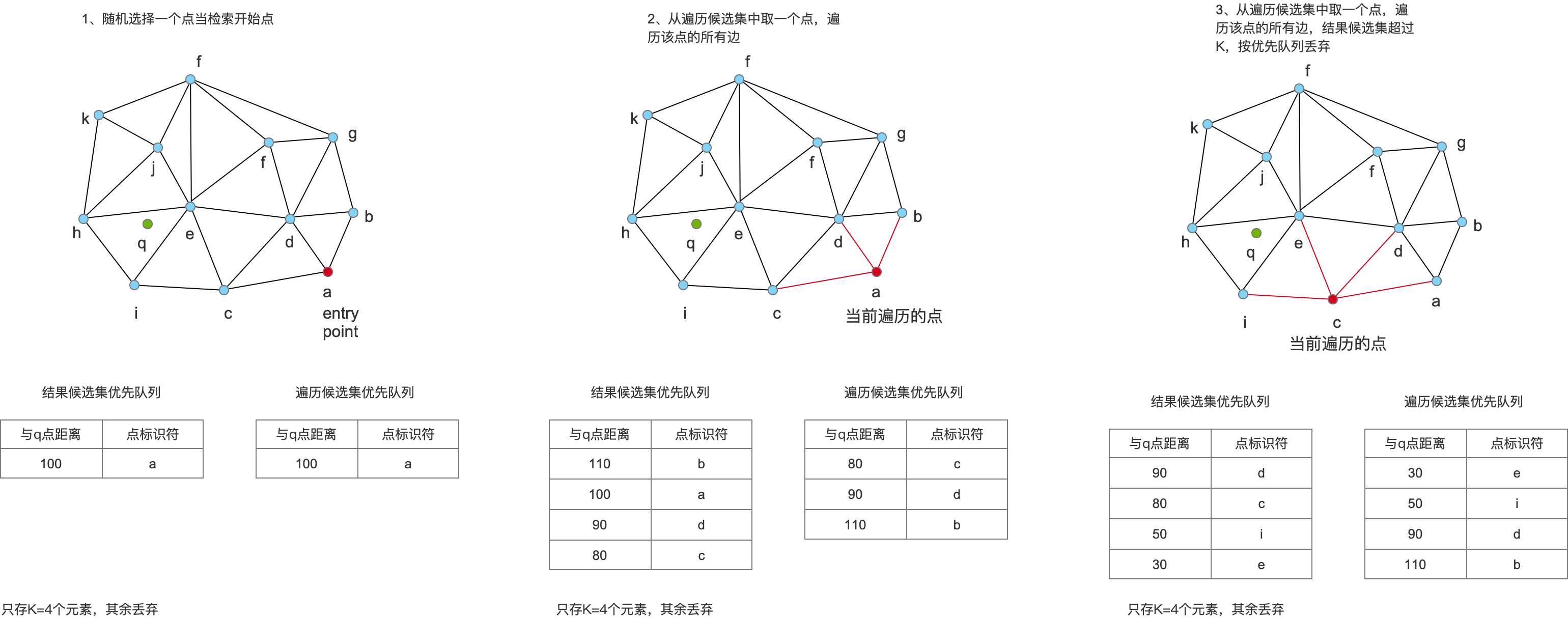
如下圖所示:
-
給出一個query點,如上圖 紅色點
-
初始化一個點集存取記錄儲存
-
初始化兩個優先佇列,一個儲存結果候選集,只存K個元素,一個儲存遍歷候選集
-
隨機找一個點,當作進場開始點(如上圖右下角紅點,entry point)
-
entry point 加入遍歷候選集,如果它並不是標記為刪除的,把它放入結果候選集;
-
從遍歷候選集中取出距離query點最近的點,遍歷與它所有關聯的點,檢查是否已經存取過
- 如果它已經存取過,直接跳過
- 如果沒有存取過加入遍歷候選集,如果關聯點並不是標記為刪除的,把它放入結果候選集。
-
重複第6步驟,直到遍歷候選集中距離query最近的點,都比結果候選集距離query最遠的點距離query大,並且結果候選集已經足夠K個點就結束。
新增構建步驟
- 給出一個待新增的點 A
- 在圖中檢索出top k個點,k = ef_construction
- 從點A 連線其中M_個點,這M_個點從 top k裡面選擇,後面簡稱M_個點裡面當前遍歷的點為點B
- 遍歷每條新增連邊,檢查是否有相應的反向連邊,也就是從點B到點A的連邊
- 如果有就跳過
- 如果沒有就給反向邊連上
- 如果點B的連邊沒有超過M_, 直接連上就行
- 如果點B的連邊超過了M_, 需要重新選擇M_個點,保證點B只有外出M_條邊
簡單的說,其實就是找出top k近鄰,然後連邊。重點問題在於,如果 K > M_,怎麼選擇更加合適的鄰居呢?
最簡單的方式:按距離排序,選擇跟新增點最近的那些。這樣有可能形成孤島,導致整個圖並不是連通圖,有沒有更好的方式呢?
優質鄰居選擇方式
如下圖所示:

-
給出一個query點(黃色),top K結果候選集(紅色)
-
初始化一個結果候選集的優先佇列,一個優質鄰居列表
-
從結果候選集取出一個點,判斷該點與query的距離,是不是比該點與優質鄰居的距離都大
- 如果是,加入優質鄰居列表
- 如果不是,丟棄
其實就是把連邊的點儘量分散。
更新點構建步驟
- 初始化兩個set 集合A、B
- 集合A存更新點的所有鄰居,集合B存更新點的 所有鄰居 & 所有鄰居的鄰居
- 給集合A裡面的所有點,從集合B裡面重新選擇合適的鄰居
- 重新跑一遍新增點的流程,見上面的新增
六、圖論演演算法優化——HNSW
其實它就是 Skip list + NSW,我們先回顧下跳錶的結構吧。
跳錶

這是一種很常見的資料結構,這裡就不詳細描述了。
真正的HNSW結構

如上圖所示,其實HNSW 就是 Skip List + NSW。
跳錶也是分層的,但是真正的跳錶每一層是一條有序列表。
然而在HNSW中,也是跟跳錶一樣分層,這裡每一層就是一個NSW有向圖。
加上跳錶思想後,nsw的操作只有一個不同的點。檢索進場點是上一層的得到的最近的點,當然最上面一層還是隨機點進場。
這種演演算法複雜度理論上是logN的,當然也只是理論上哈,而且又一定的精度損失~
實際場景
實際場景上
- 如果記憶體夠大能撐住NSW所需的記憶體,可以考慮直接上HNSW
- 如果記憶體不夠,可以考慮IVF + HNSW 或者 直接隨機分佈 + HNSW