簡單介紹Python遺傳演演算法Geatpy工具箱
前端(vue)入門到精通課程:進入學習
【相關推薦:Python3視訊教學 】
一、 什麼是遺傳演演算法?
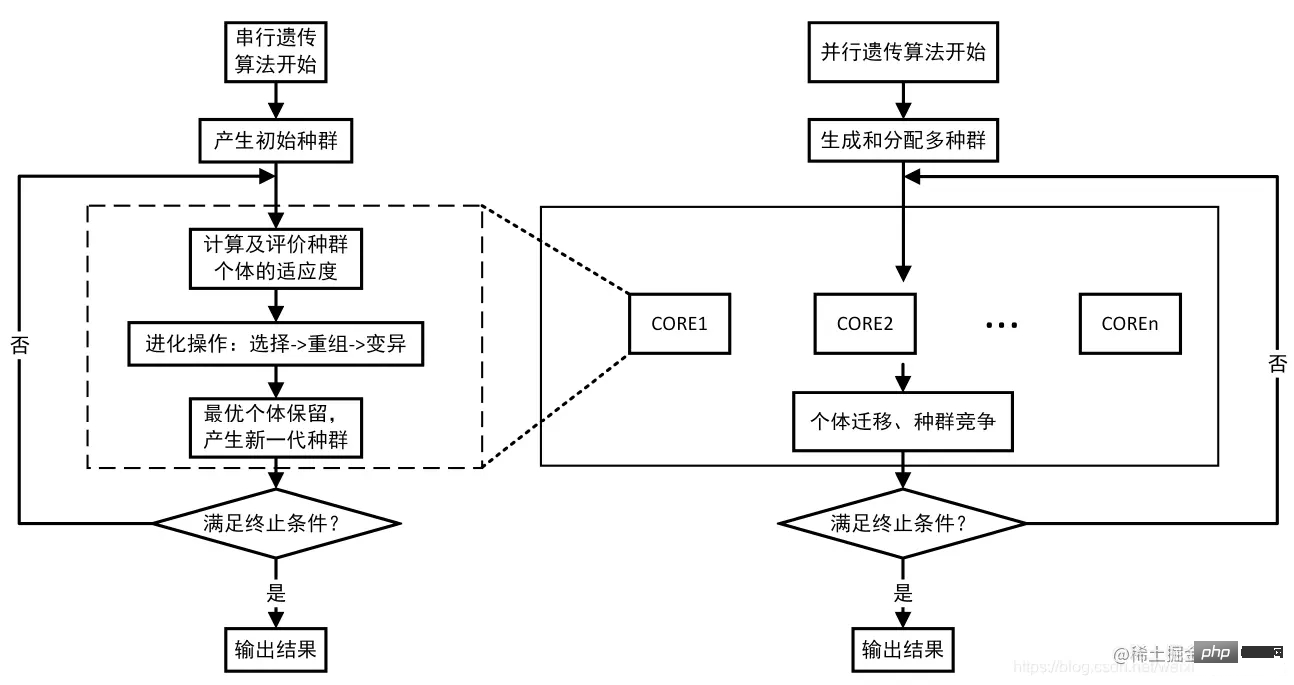
遺傳演演算法是模擬生物遺傳學和自然選擇機理,通過人工方式所構造的一類搜尋演演算法,從某種程度上說遺傳演演算法是對生物進化過程進行的數學方式模擬。生物種群的生存過程普遍遵循達爾文進化準則,群體中的個體根據對環境的適應能力而被大自然所選擇或淘汰。進化過程的結果反映在個體的結構上,其染色體包含若干基因,相應的表現型和基因型的聯絡體現了個體的外部特性與內部機理間邏輯關係。通過個體之間的交叉、變異來適應大自然環境。生物染色體用數學方式或計算機方式來體現就是一串數碼,仍叫染色體,有時也叫個體;適應能力是對應著一個染色體的一個數值來衡量;染色體的選擇或淘汰則按所面對的問題是求最大還是最小來進行。
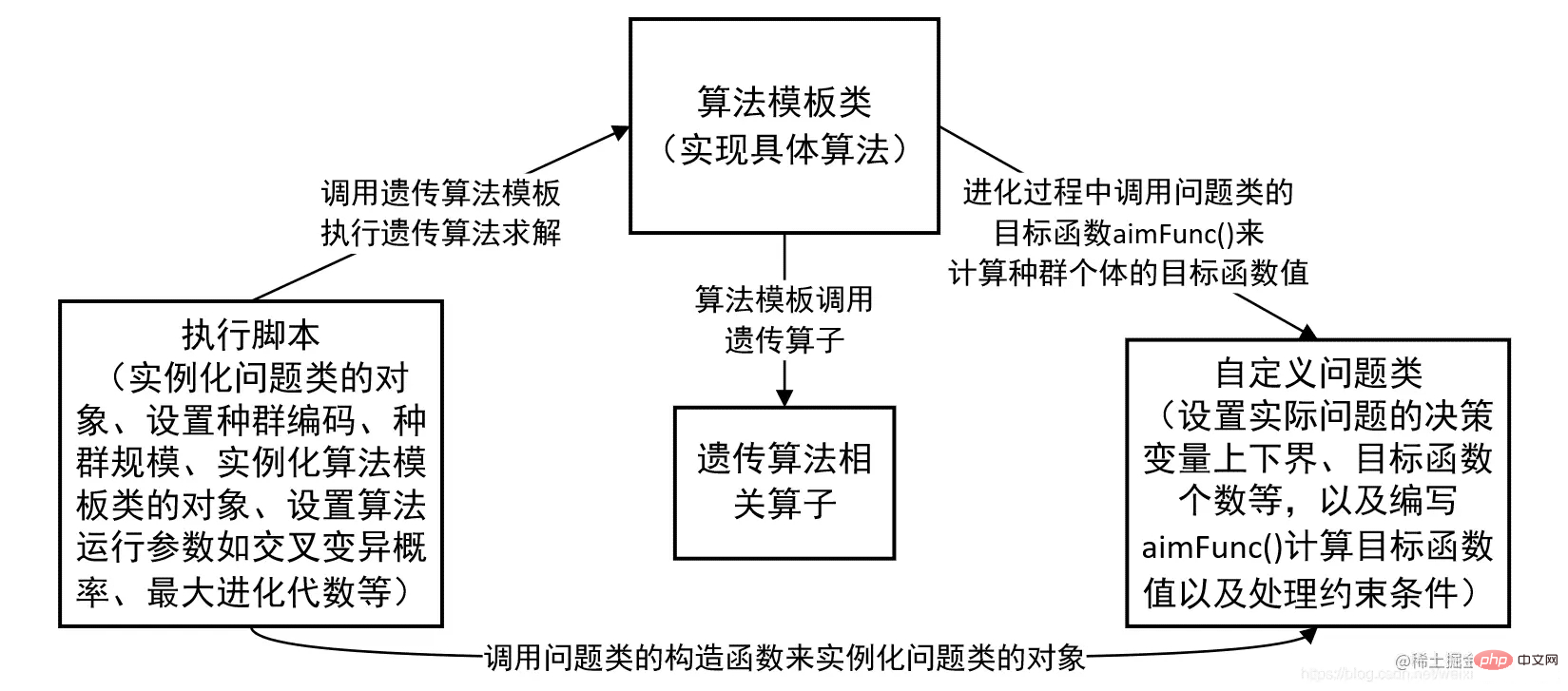
二、 遺傳演演算法庫Geatpy
2.1 遺傳演演算法工具箱Geatpy引數介紹
API官方參考檔案
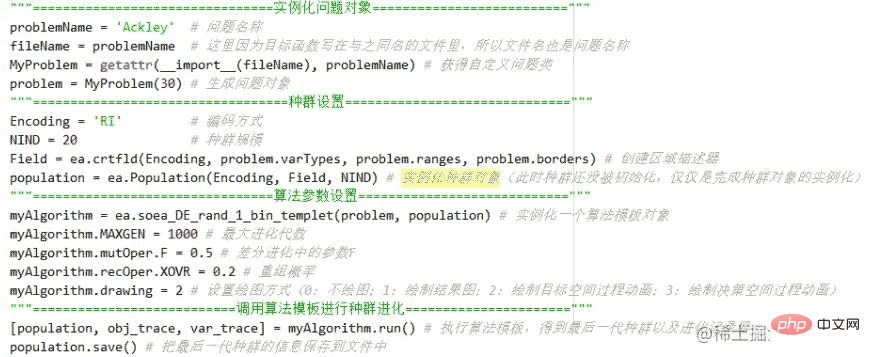
population引數【重要屬性:Chrom,Phen,Objv,CV,FitnV】
- sizes : int - 種群規模,即種群的個體數目。
- ChromNum : int - 染色體的數目,即每個個體有多少條染色體。
- Encoding : str - 染色體編碼方式, 'BG':二進位制/格雷編碼; 'RI':實整數編碼,即實數和整數的混合編碼; 'P':排列編碼
- Field : array - 譯碼矩陣
- Chrom : array - 種群染色體矩陣,每一行對應一個個體的一條染色體。
- Lind : int - 種群染色體長度。
- ObjV : array - 種群目標函數值矩陣,每一行對應一個個體的目標函數值,每一列對應一個目標
- FitnV : array - 種群個體適應度列向量,每個元素對應一個個體的適應度,最小適應度為0
- CV : array - CV(Constraint Violation Value)是用來定量描述違反約束條件程度的矩陣,每行對應一個個體,每列對應一個約束
- Phen : array - 種群表現型矩陣(即種群各染色體解碼後所代表的決策變數所組成的矩陣)。
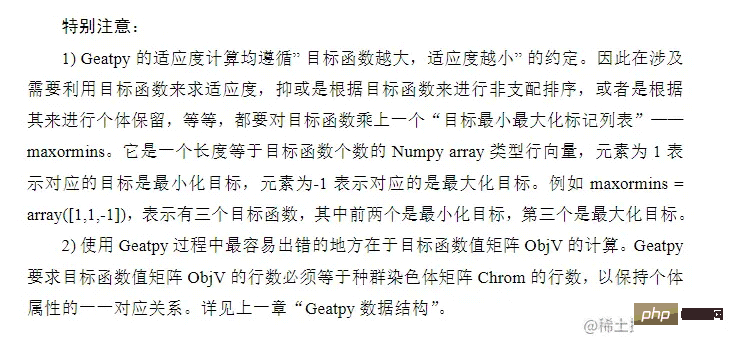
- 如果通過CV矩陣基於可行性法則進行約束的設定,那麼 不等式約束需要 ≤,等式約束 需要傳入abs( ) (因為遵循值越大,適應度越小的原則)

- ea.Problem.init()中的lbin與ubin(決策變數範圍邊界矩陣)表示範圍區間的開閉,1閉合0開區間
Geatpy 結果引數介紹
success: True or False, 表示演演算法是否成功求解。
stopMsg: 儲存著演演算法停止原因的字串。
optPop: 儲存著演演算法求解結果的種群物件。如果無可行解,則optPop.sizes=0。optPop.Phen為決策變數矩陣,optPop.ObjV為目標函數值矩陣。
lastPop: 演演算法進化結束後的最後一代種群物件。
Vars: 等於optPop.Phen,此處即最優解。若無可行解,則Vars=None。
ObjV: 等於optPop.ObjV,此處即最優解對應的目標函數值。若無可行解,ObjV=None。
CV: 等於optPop.CV,此處即最優解對應的違反約束程度矩陣。若無可行解,CV=None。
startTime: 程式執行開始時間。
endTime: 程式執行結束時間。
executeTime: 演演算法 所用時間。
nfev: 演演算法評價次數
gd: (多目標優化且給定了理論最優解時才有) GD指標值。
igd: (多目標優化且給定了理論最優解時才有) IGD指標值。
hv: (多目標優化才有) HV指標值。
spacing: (多目標優化才有) Spacing指標值。
三、最佳實踐
3.1 程式碼範例 | 引數模板
解集:
header_regex = '|'.join(['{}'] * len(headers))
header_str = header_regex.format(*[str(key).center(width) for key, width in zip(headers, widths)])
print("=" * len(header_str))
print(header_str)
print("-" * len(header_str))
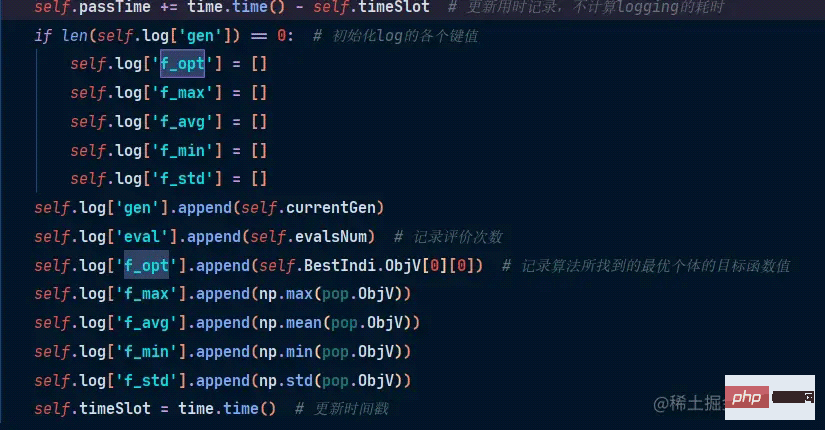
gen: 進化代數
eval:記錄評價次數
f\_opt: 當代最優個體的目標函數值
f\_max=當代種群最大函數值
f\_min 最小 f\_avg : 平均水平
f\_std: 標準約束水平
3.2 最佳實踐
使用geatpy庫求解有向無環圖最短路
程式碼【最短路】一:使用geatpy庫
import numpy as np
import geatpy as ea
class MyProblem(ea.Problem): # 繼承Problem父類別
def __init__(self):
name = 'Shortest_Path' # 初始化name(函數名稱,可以隨意設定)
M = 1 # 初始化M(目標維數)
maxormins = [1] # 初始化maxormins(目標最小最大化標記列表,1:最小化該目標;-1:最大化該目標)
Dim = 10 # 初始化Dim(決策變數維數)
varTypes = [1] * Dim # 初始化varTypes(決策變數的型別,元素為0表示對應的變數是連續的;1表示是離散的)
lb = [0] * Dim # 決策變數下界
ub = [9] * Dim # 決策變數上界
lbin = [1] * Dim # 決策變數下邊界 1表示閉合區間,0表示開區間
ubin = [1] * Dim # 決策變數上邊界
# 呼叫父類別構造方法完成範例化
ea.Problem.__init__(self, name, M, maxormins, Dim, varTypes, lb, ub, lbin, ubin)
# 設定每一個結點下一步可達的結點(結點從1開始數,因此列表nodes的第0號元素設為空列表表示無意義)
self.nodes = [[], [2, 3], [3, 4, 5], [5, 6], [7, 8], [4, 6], [7, 9], [8, 9], [9, 10], [10]]
# 設定有向圖中各條邊的權重
self.weights = {'(1, 2)': 36, '(1, 3)': 27, '(2, 4)': 18, '(2, 5)': 20, '(2, 3)': 13, '(3, 5)': 12,
'(3, 6)': 23,
'(4, 7)': 11, '(4, 8)': 32, '(5, 4)': 16, '(5, 6)': 30, '(6, 7)': 12, '(6, 9)': 38,
'(7, 8)': 20,
'(7, 9)': 32, '(8, 9)': 15, '(8, 10)': 24, '(9, 10)': 13}
def decode(self, priority): # 將優先順序編碼的染色體解碼得到一條從節點1到節點10的可行路徑
edges = [] # 儲存邊
path = [1] # 結點1是路徑起點
while not path[-1] == 10: # 開始從起點走到終點
currentNode = path[-1] # 得到當前所在的結點編號
nextNodes = self.nodes[currentNode] # 獲取下一步可達的結點組成的列表
chooseNode = nextNodes[np.argmax(
priority[np.array(nextNodes) - 1])] # 從NextNodes中選擇優先順序更高的結點作為下一步要存取的結點,因為結點從1數起,而下標從0數起,因此要減去1
path.append(chooseNode)
edges.append((currentNode, chooseNode))
return path, edges
def aimFunc(self, pop): # 目標函數
pop.ObjV = np.zeros((pop.sizes, 1)) # 初始化ObjV
for i in range(pop.sizes): # 遍歷種群的每個個體,分別計算各個個體的目標函數值
priority = pop.Phen[i, :]
path, edges = self.decode(priority) # 將優先順序編碼的染色體解碼得到存取路徑及經過的邊
pathLen = 0
for edge in edges:
key = str(edge) # 根據路徑得到鍵值,以便根據鍵值找到路徑對應的長度
if not key in self.weights:
raise RuntimeError("Error in aimFunc: The path is invalid. (當前路徑是無效的。)", path)
pathLen += self.weights[key] # 將該段路徑長度加入
pop.ObjV[i] = pathLen # 計算目標函數值,賦值給pop種群物件的ObjV屬性
## 執行指令碼
if __name__ == "__main__":
# 範例化問題物件
problem = MyProblem()
# 構建演演算法
algorithm = ea.soea_EGA_templet(problem,
ea.Population(Encoding='RI', NIND=4),
MAXGEN=10, # 最大進化代數
logTras=1) # 表示每隔多少代記錄一次紀錄檔資訊
# 求解
res = ea.optimize(algorithm, verbose=True, drawing=1, outputMsg=False, drawLog=False, saveFlag=True,
dirName='result')
print('最短路程為:%s' % (res['ObjV'][0][0]))
print('最佳路線為:')
best_journey, edges = problem.decode(res['Vars'][0])
for i in range(len(best_journey)):
print(int(best_journey[i]), end=' ')
print()【相關推薦:Python3視訊教學 】
以上就是簡單介紹Python遺傳演演算法Geatpy工具箱的詳細內容,更多請關注TW511.COM其它相關文章!