Bellman-Ford演演算法與SPFA演演算法詳解
PS:如果您只需要Bellman-Ford/SPFA/判負環模板,請到相應的模板部分
上一篇中簡單講解了用於多源最短路的Floyd演演算法。本篇要介紹的則是用與單源最短路的Bellman-Ford演演算法和它的一些優化(包括已死的SPFA)
Bellman-Ford演演算法
其實,和Floyd演演算法類似,Bellman-Ford演演算法同樣是基於DP思想的,而且也是在不斷的進行鬆弛操作(可以理解為「不斷放寬對結果的要求」,比如在Floyd中就體現為不斷第一維\(k\),具體解釋在這裡)
既然是單源最短路徑問題,我們就不再需要在DP狀態中指定起始點。於是,我們可以設計出這樣的DP狀態(和Floyd很類似):
顯然,初始值為:
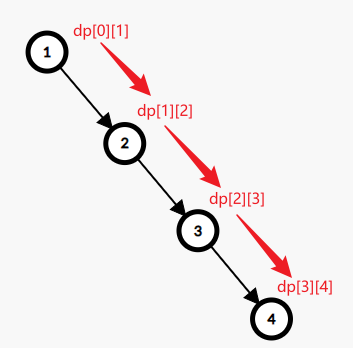
我們可以先考慮,如何從\(dp[0][u]\)轉移出\(dp[1][u]\)(就是多一條邊)。
於是很容易想到這個最顯而易見又最暴力的方法:列舉每一條邊\((u, v)\),並更新\(dp[1][v]=min(dp[1][v], dp[0][u]+w[u][v])(其中w[u][v]表示這條邊的邊權)\)
推廣到任意\(dp[k-1][u]\)到\(dp[k][u]\)的轉移,我們仍然可以使用這樣的方法。
下面是程式碼實現:
struct Edge {
int u, v; // 邊的兩個端點
int w; // 邊的權值
};
int n; // 點數
int m; // 邊數
Edge e[MAXM]; // 所有的邊
int dp[MAXN][MAXN]; // 解釋見上方
void bellman_ford(int start) {
memset(dp, 0x3f, sizeof(dp)); // 初始化為INF
dp[0][start] = 0;
for(int i = 1; i < n; i++) { // 一張圖中的最長路徑最多隻包含n - 1邊,所以更新n - 1遍就夠了(因為點不能重複)
for(int j = 1; j <= n; j++) { // 先複製一遍
dp[i][j] = dp[i - 1][j];
}
for(int j = 1; j <= m; j++) { // 列舉每一條邊
dp[i][e[j].v] = min(dp[i][e[j].v], dp[i - 1][e[j].u] + e[j].w);
}
}
}
顯然,時間複雜度為\(O(nm)\),空間複雜度也是\(O(nm)\),程式碼複雜度為O(1)。
我們可以先考慮優化空間複雜度(壓縮掉第一維\(k\)),於是,DP狀態變為:
轉移方程為:
關於狀態壓縮後的正確性:最有可能令人不理解的部分就是:在同一輪更新中,我們可能會用已經更新完的值再去更新別的值。這就導致,同一論更新中,不同節點被更新到的DP值對應的\(k\)可能不同。(如果沒看懂,就看下面這張圖)
但是實際上,我們其實並不關心到底走了幾步,而只關心最短路的邊權和。所以,像這樣的「錯位更新」並不會引起錯誤。
於是,我們可以得到新的程式碼:
struct Edge {
int u, v; // 邊的兩個端點
int w; // 邊的權值
};
int n; // 點數
int m; // 邊數
Edge e[MAXM]; // 所有的邊
int dp[MAXN]; // 解釋見上方
void bellman_ford(int start) {
memset(dp, 0x3f, sizeof(dp)); // 初始化為INF
dp[start] = 0;
for(int i = 1; i < n; i++) { // 一張圖中的最長路徑最多隻包含n - 1邊,所以更新n - 1遍就夠了(因為點不能重複)
for(int j = 1; j <= m; j++) { // 列舉每一條邊
dp[e[j].v] = min(dp[e[j].v], dp[e[j].u] + e[j].w);
}
}
}
我們可以繼續考慮優化時間複雜度。顯然,如果在某一輪的更新後,發現並沒有任何一個值被更新,那麼就意味著:這張圖已經不能再被更新了(已經求出\(s\)到每個點的最短路),那就可以直接break了。
所以,優化後的程式碼如下:
Bellman-Ford演演算法模板
struct Edge {
int v; // 邊指向的節點
int w; // 邊的權值
};
int n; // 點數
int m; // 邊數
vector<Edge> g[MAXN]; // 儲存從每個節點發出的邊
int dp[MAXN]; // 解釋見上方
void bellman_ford(int start) {
memset(dp, 0x3f, sizeof(dp)); // 初始化為INF
dp[start] = 0;
for(int i = 1; i < n; i++) { // 一張圖中的最長路徑最多隻包含n - 1邊,所以更新n - 1遍就夠了(因為點不能重複)
bool updated = 0; // 記錄是否有節點被更新
for(int i = 1; i <= n; i++) { // 列舉每一個節點
if(dp[i] == 0x3f3f3f3f) { // 無法到達的節點
continue;
}
for(Edge &e : g[i]) { // 列舉從這個節點發出的每一條邊
if(dp[i] + e.w < dp[e.v]) {
dp[e.v] = dp[i] + e.w;
updated = 1; // 標記有值被更新
}
}
}
if(!updated) {
break; // 沒有節點被更新,直接退出
}
}
}
這就是最常見的Bellman-Ford樸素演演算法了。
同時,也可以看到,本次優化後的程式碼中將「直接儲存所有邊」的方式改為了使用「鄰接表」。這是因為鄰接表在圖論演演算法中更加常用,也使得Bellman-Ford演演算法可以更容易地和其他演演算法配合使用。
SPFA演演算法
SPFA演演算法(Shortest Path Faster Algorithm),顧名思義就是一種讓Bellman-Ford跑得更快的方法。
在上一部分的最後,我們對於沒有更新的情況,直接break掉,來優化時間。但是,稍加思考就會發現:有的時候,我們會為了唯一幾個被更新過的節點,而再把所有的節點遍歷一遍,那麼這樣就會產生時間的浪費。所以,SPFA本質上就是使用佇列來解決這樣的問題。
下面是SPFA演演算法的基本步驟:
-
我們先設定好初始值(和Bellman-Ford一樣),再將起點(\(s\))加入佇列中。
-
每次從佇列中取出一個節點,嘗試用它去更新與它相連的節點;如果某個節點的最短距離被更新了,那麼將這個節點加入佇列。
-
回到步驟2
於是,很容易寫出對應的程式碼:
SPFA演演算法模板
struct Edge {
int v; // 邊指向的節點
int w; // 邊的權值
};
int n; // 點數
int m; // 邊數
vector<Edge> g[MAXN]; // 儲存從每個節點發出的邊
int dp[MAXN]; // 定義沒有變
queue<int> q; // 儲存點用的佇列
bool vis[MAXN]; // 記錄每個節點當前是否在佇列中
void spfa(int start) {
memset(dp, 0x3f, sizeof(dp)); // 初始化為INF
dp[start] = 0;
q.push(start);
vis[start] = 1; // 標記一下
while(!q.empty()) {
int x = q.front(); // 取出一個節點
q.pop();
vis[x] = 0; // 清除標記,因為下次還有可能入隊
for(Edge &e : g[x]) { // 列舉從這個節點發出的每一條邊
if(dp[x] + e.w < dp[e.v]) {
dp[e.v] = dp[x] + e.w;
if(!vis[e.v]) { // 如果這個節點現在不在佇列中
q.push(e.v); // 那就把它加入佇列
vis[e.v] = 1; // 標記一下
}
}
}
}
}
一道測試用的例題:P4779 【模板】單源最短路徑(標準版)
Bellman-Ford & SPFA判斷負環
負環,就是邊權和為負數的環。負環是最短路演演算法中一個很重要的問題,因為只要進入一個負環,最短距離就會無限減小。當然,這肯定不是我們希望的,所以接下來就要介紹如何使用Bellman-Ford演演算法或SPFA演演算法來判斷一張圖中是否包含負環。
顯然,一張有向圖上的任意一條簡單路徑最多隻包含\(n-1\)條邊(否則不可能是 簡單 的)。而且,當圖中沒有負環時,兩點間的最短路徑一定是簡單路徑。所以,如果發現從起點到某個節點\(u\)的最短路徑包含多於\(n-1\)條邊,那麼這條路徑上一定包含負環。
所以,我們只需要在演演算法中新增一些簡單的判斷就可以實現判負環了。
具體方法:
-
對於普通的Bellman_ford演演算法,我們可以在完成DP後,在進行一遍更新,如果存在任意節點與起點之間的最短路徑是可以被更新的,那麼可以確定圖中一定存在負環
-
對於SPFA演演算法,我們可以在更新最短路徑的同時,記錄每條最短路徑上的邊數,如果發現某條最短路徑的邊數大於\(n-1\),那麼可以確定圖中一定存在負環
於是,我們可以寫出分別使用這兩種演演算法來判負環的程式碼:
Bellman-Ford判負環模板
struct Edge {
int v; // 邊指向的節點
int w; // 邊的權值
};
int n; // 點數
int m; // 邊數
vector<Edge> g[MAXN]; // 儲存從每個節點發出的邊
int dp[MAXN];
bool bellman_ford_check_ncycle(int start) {
memset(dp, 0x3f, sizeof(dp)); // 初始化為INF
dp[start] = 0;
for(int i = 1; i < n; i++) { // 一張圖中的最長路徑最多隻包含n - 1邊,所以更新n - 1遍就夠了(因為點不能重複)
bool updated = 0; // 記錄是否有節點被更新
for(int i = 1; i <= n; i++) { // 列舉每一個節點
if(dp[i] == 0x3f3f3f3f) { // 無法到達的節點
continue;
}
for(Edge &e : g[i]) { // 列舉從這個節點發出的每一條邊
if(dp[i] + e.w < dp[e.v]) {
dp[e.v] = dp[i] + e.w;
updated = 1; // 標記有值被更新
}
}
}
if(!updated) {
return 0; // 沒有節點被更新,一定沒有負環
}
}
for(int i = 1; i <= n; i++) { // 列舉每一個節點
if(dp[i] == 0x3f3f3f3f) { // 無法到達的節點
continue;
}
for(Edge &e : g[i]) { // 列舉從這個節點發出的每一條邊
if(dp[i] + e.w < dp[e.v]) {
return 1; // 還能被更新說明有負環
}
}
}
return 0;
}
SPFA判負環模板
struct Edge {
int v; // 邊指向的節點
int w; // 邊的權值
};
int n; // 點數
int m; // 邊數
vector<Edge> g[MAXN]; // 儲存從每個節點發出的邊
int dp[MAXN]; // dp的定義沒有變
int cnt[MAXN]; // 記錄從起點到節點u的最短路徑中的邊數
queue<int> q; // 儲存點用的佇列
bool vis[MAXN]; // 記錄每個節點當前是否在佇列中
bool spfa_check_ncycle(int start) { // SPFA判負環
memset(dp, 0x3f, sizeof(dp)); // 初始化為INF
dp[start] = 0;
q.push(start);
vis[start] = 1; // 標記一下
while(!q.empty()) {
int x = q.front(); // 取出一個節點
q.pop();
vis[x] = 0; // 清除標記,因為下次還有可能入隊
for(Edge &e : g[x]) { // 列舉從這個節點發出的每一條邊
if(dp[x] + e.w < dp[e.v]) {
dp[e.v] = dp[x] + e.w;
cnt[e.v] = cnt[e.v] + 1; // 多了當前這條邊
if(cnt[e.v] >= n) { // 從起點到v的最短路徑上有多於n - 1條邊
return 1; // 一定出現了負環
}
if(!vis[e.v]) { // 如果這個節點現在不在佇列中
q.push(e.v); // 那就把它加入佇列
vis[e.v] = 1; // 標記一下
}
}
}
}
return 0; // 沒有負環
}
一道測試用的例題:P3385 【模板】負環