程式分析與優化
本章是系列文章的第十一章,主要介紹GPU的編譯原理,分析了多核執行過程中的記憶體分岔和控制流分岔的分析和處理。
本文中的所有內容來自學習DCC888的學習筆記或者自己理解的整理,如需轉載請註明出處。周榮華@燧原科技
11.1 什麼是GPU
11.1.1 GPU的發展歷史
軟體控制的VGA幀緩衝區
頻繁使用的圖形柵格化程式
嘗試用硬體來加速這些處理
流水線化的圖形處理過程,例如變形,對映,切片,顯示等等
工程師開始發現一些過程本身雖然不一樣,但實現該功能的硬體是相似的,例如圖著色
從單獨的圖著色API到泛化的API
GPU指令集的誕生→泛化的整數通用處理常式 → 帶分支支援的處理常式
一個獨立的柵格化處理晶片 + 通用處理晶片
然後柵格化處理晶片又整合到了GPU裡面,變成通用處理晶片的一部分
……
11.1.2 計算機組織
傳統的SIMD(Single Instruction Multiple Data)和SPMD(Single Program Multiple Data)到GPU的MSIMD(Multiple Single-Instruction Multiple-Data)
11.1.3 程式設計環境
主流程式設計環境主要有兩種,開源的OpenCL和閉源的C for CUDA,後者是NVIDIA釋出的,前者是其他公司組成的聯盟釋出的。這裡主要說CUDA。
異構程式語言:一個能指定不同異構處理器上執行的程式語言。
傳統的C程式語言做矩陣操作的例子:
1 void saxpy_serial(int n, float alpha, float *x, float *y) { 2 for (int i = 0; i < n; i++) 3 y[i] = alpha * x[i] + y[i]; 4 } 5 // Invoke the serial function: 6 saxpy_serial(n, 2.0, x, y);
轉換成CUDA的例子:
1 __global__ void saxpy_parallel(int n, float alpha, float *x, float *y) { 2 int i = blockIdx.x * blockDim.x + threadIdx.x; 3 if (i < n) 4 y[i] = alpha * x[i] + y[i]; 5 } 6 // Invoke the parallel kernel: 7 int nblocks = (n + 255) / 256; 8 saxpy_parallel<<<nblocks, 256>>>(n, 2.0, x, y);
NV的GPU的組織結構:Grids → Blocks → Warps → Threads

Cuda programs = CPU programs + kernels
Kernels呼叫語法:
kernel<<<dGrd, dBck>>>(A,B,w,C);
指定grids和block
CPU programs → host programs
kernels → PTX (Parallel Thread Execution) → SASS (Streaming ASSembly)
11.2 分岔(Divergence)
英文裡面Divergence有分岔,分支,歧義等多種意思,這裡表示程式執行到某個點之後,可能有多個分支的情況。
11.2.1 SIMD的優缺點
優點:更低的功耗,指令解碼佔用空間更少。
對於沒有分支的線性程式,SIMD的效能非常好。但程式幾乎不可避免會存在多個分支。
常見的分支主要有兩類:
- 因為記憶體存取地址不一致導致的記憶體分岔
- 因為控制流分支導致的分岔
11.2.2 控制流分岔的例子
對下面的cuda 程式碼:
1 __global__ void ex(float *v) { 2 if (v[tid] < 0.0) { 3 v[tid] /= 2; 4 } else { 5 v[tid] = 0.0; 6 } 7 }
對應的控制流圖是這樣的:
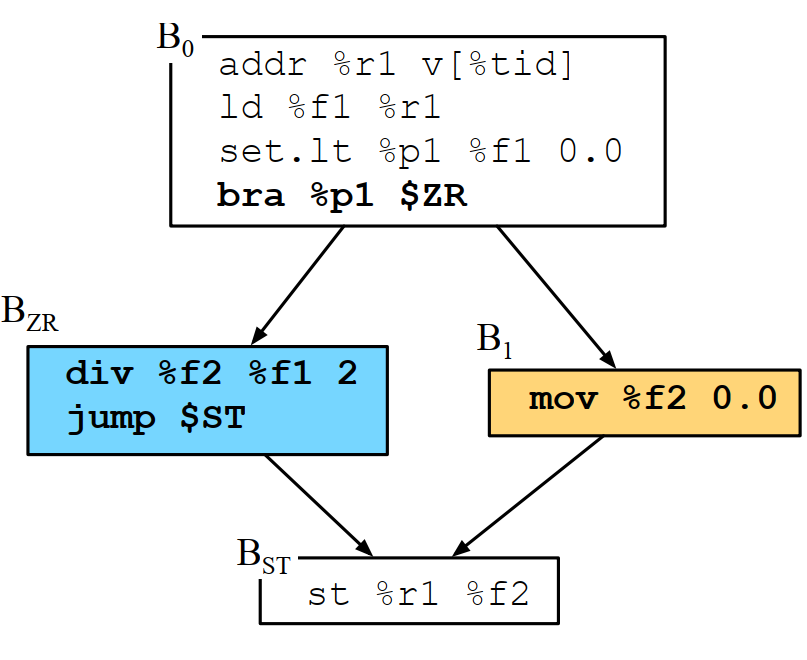
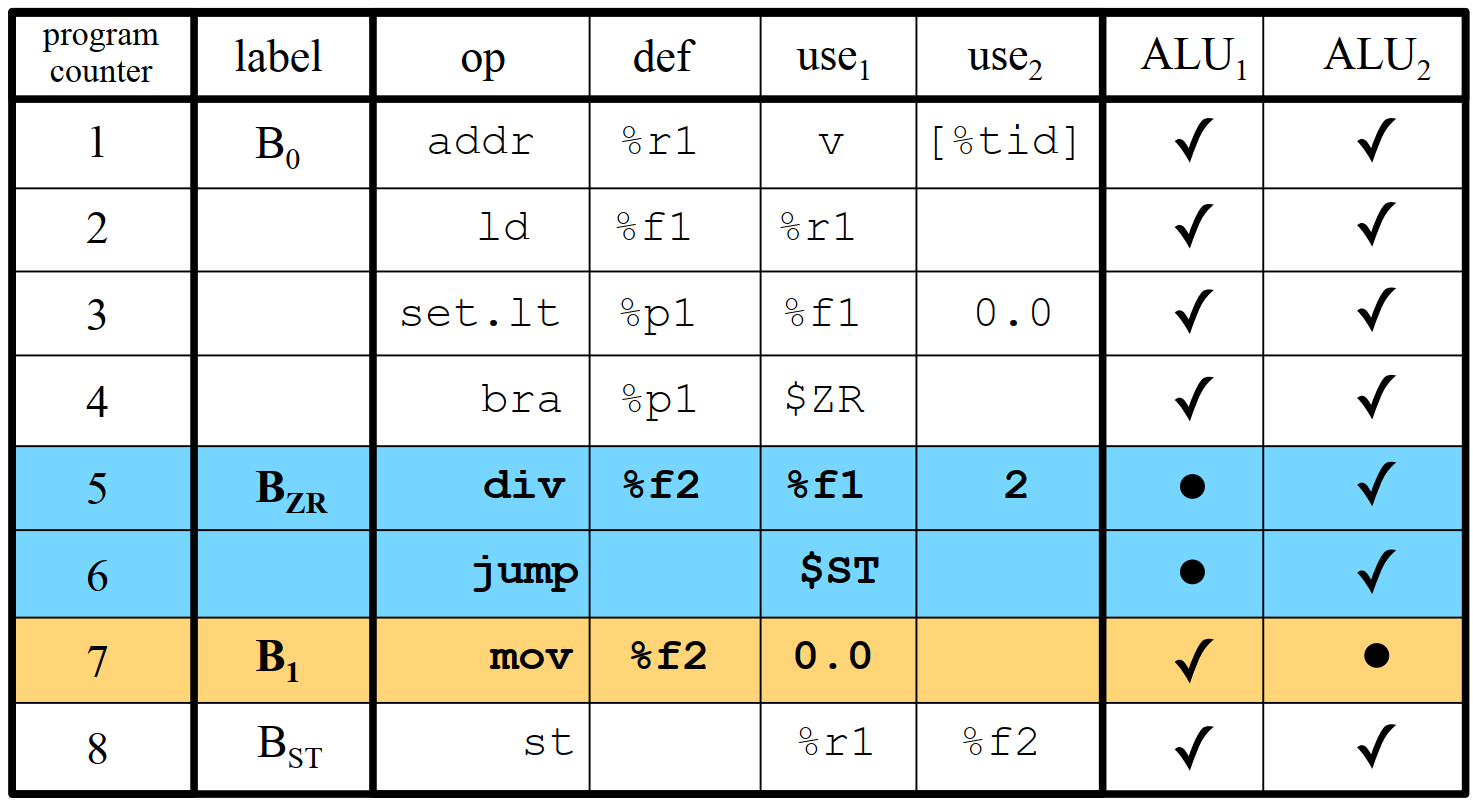
因為上面程式只有一處分岔(還記得上一章ILP中說的超級塊麼?上面的DAG轉換成樹之後只有2個葉子節點),如果有兩個ALU,我們就可以在無視分岔的情況下把程式執行流水線畫出來:
11.2.3 什麼樣的輸入效能最好?
對下面的cuda的例子,怎麼樣調整輸入來達到最好的效能?
1 __global__ void dec2zero(int *v, int N) { 2 int xIndex = blockIdx.x * blockDim.x + threadIdx.x; 3 if (xIndex < N) { 4 while (v[xIndex] > 0) { 5 v[xIndex]--; 6 } 7 } 8 }
下面有五種初始化的方法:
1 void vecIncInit(int *data, int size) { 2 for (int i = 0; i < size; ++i) { 3 data[i] = size - i - 1; 4 } 5 } 6 void vecConsInit(int *data, int size) { 7 int cons = size / 2; 8 for (int i = 0; i < size; ++i) { 9 data[i] = cons; 10 } 11 } 12 void vecAltInit(int *data, int size) { 13 for (int i = 0; i < size; ++i) { 14 if (i % 2) { 15 data[i] = size; 16 } 17 } 18 } 19 void vecRandomInit(int *data, int size) { 20 for (int i = 0; i < size; ++i) { 21 data[i] = random() % size; 22 } 23 } 24 void vecHalfInit(int *data, int size) { 25 for (int i = 0; i < size / 2; ++i) { 26 data[i] = 0; 27 } 28 for (int i = size / 2; i < size; ++i) { 29 data[i] = size; 30 } 31 }
測試下來的結果,在總的執行近似的情況下,沒有分岔和有一個分岔的效能是2倍的差異,正好印證了之前一個分岔需要2個ALU才能確保並行處理的觀點。另外一個分岔的效能和另外觸發了一個亂數生成器呼叫的效能接近:
|
|
vecIncInit |
vecConsInit
|
vecAltInit |
vecRandomInit |
vecHalfInit |
|---|---|---|---|---|---|
| 總時間 | 20480000 | 20480000 | 20476800 | 20294984 | 20480000 |
| 實際時間 | 16250 | 16153 | 32193 | 30210 | 16157 |
11.3 分岔的動態檢測
11.3.1 分岔profiling
統計分岔執行時間和執行次數的方法
在並行世界,求程式的profile的過程遠比單核世界複雜,因為需要一個演演算法找到那時正在執行的執行緒將這個profile的結果儲存下來。
下面是常見的找記錄者的演演算法:
1 int writer = 0; 2 bool gotWriter = false; 3 while (!gotWriter) { 4 bool iAmWriter = false; 5 if (laneid == writer) { 6 iAmWriter = true; 7 } 8 if ( ∃ t ∈ w | iAmWriter == true) { 9 gotWriter = true; 10 } 11 else { 12 writer++; 13 } 14 }
11.3.2 經典的雙調排序Bitonic Sort
輸入是亂序3/2/4/1,經過5次排序和4次交換之後,變成順序的1/2/3/4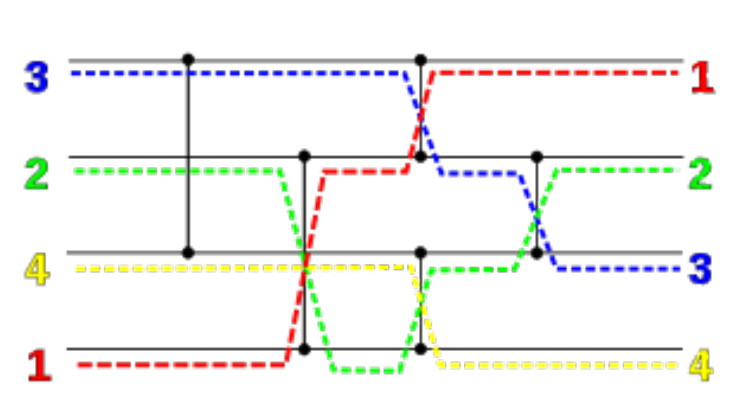
雙調排序的cuda程式碼如下:
1 __global__ static void bitonicSort(int *values) { 2 extern __shared__ int shared[]; 3 const unsigned int tid = threadIdx.x; 4 shared[tid] = values[tid]; 5 __syncthreads(); 6 for (unsigned int k = 2; k <= NUM; k *= 2) { 7 for (unsigned int j = k / 2; j > 0; j /= 2) { 8 unsigned int ixj = tid ^ j; 9 if (ixj > tid) { 10 if ((tid & k) == 0) { 11 if (shared[tid] > shared[ixj]) { 12 swap(shared[tid], shared[ixj]); 13 } 14 } else { 15 if (shared[tid] < shared[ixj]) { 16 swap(shared[tid], shared[ixj]); 17 } 18 } 19 } 20 __syncthreads(); 21 } 22 } 23 values[tid] = shared[tid]; 24 }
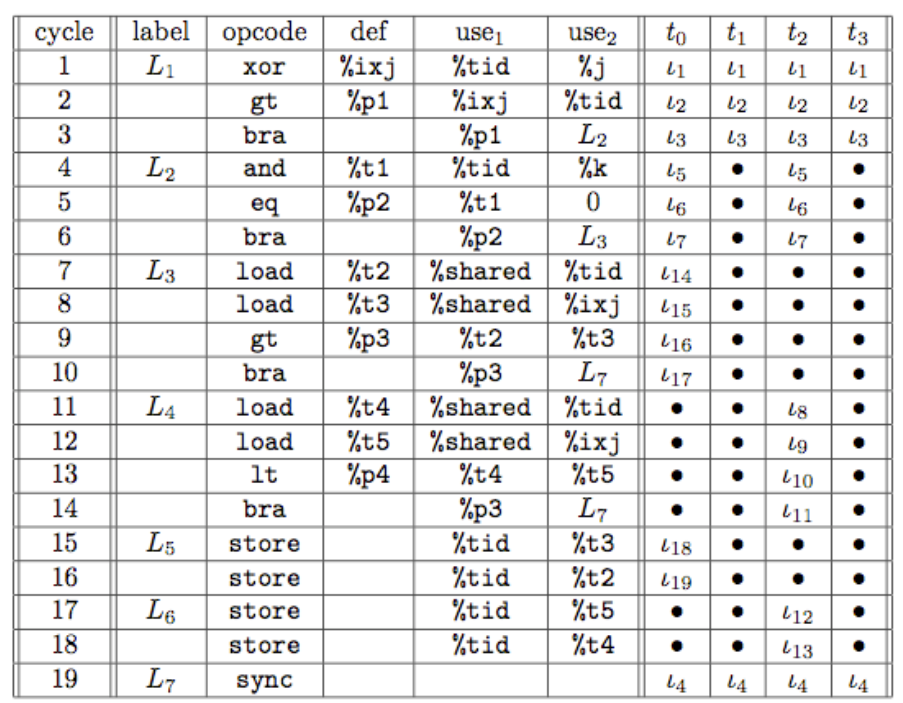
我們先不看外面的for迴圈,針對核心的8到20行生成控制流圖:
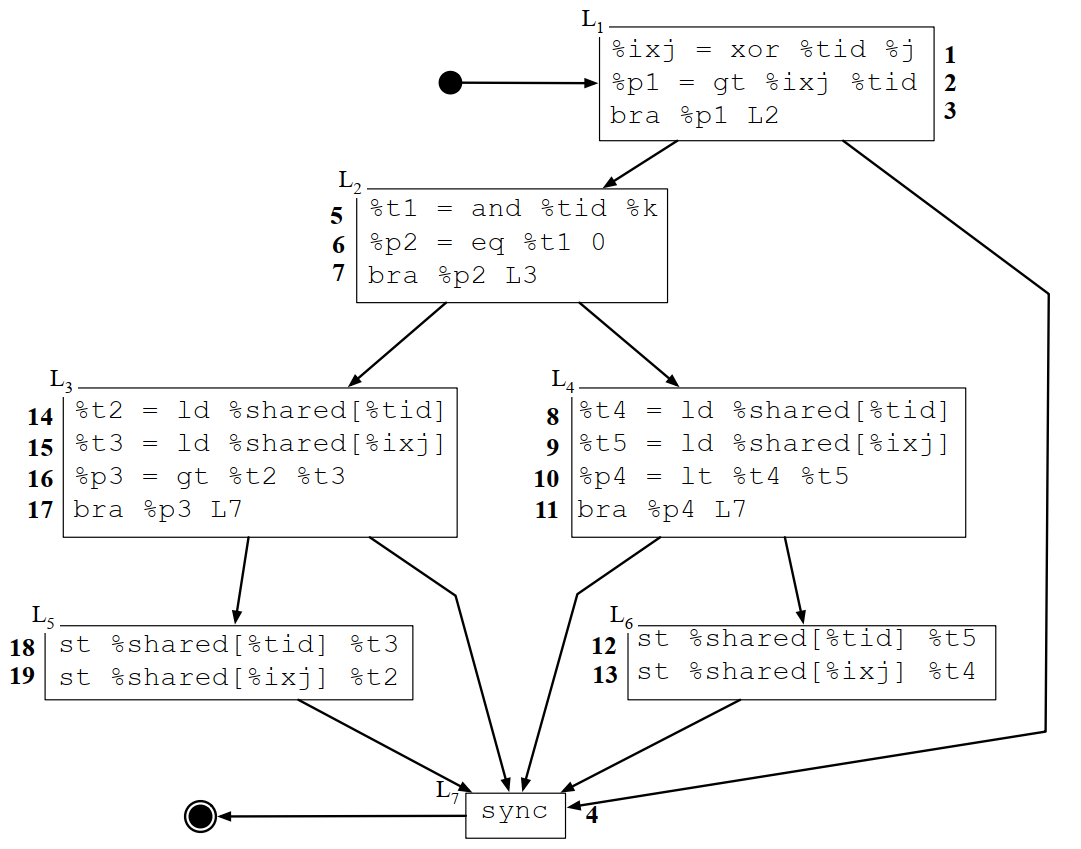
如果對執行過程做一下trace,大概結果是這樣(上面程式碼裡面有4個if,所以轉換成DAG之後就有4個分岔,對應執行時的4個執行緒):
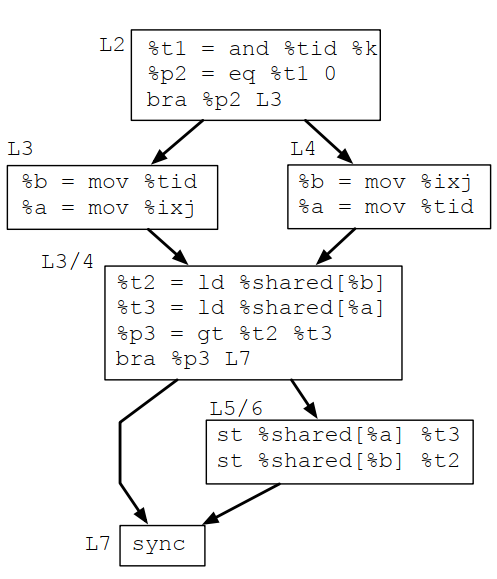
第一輪優化,3個分岔變成2個:
1 unsigned int a, b; 2 if ((tid & k) == 0) { 3 b = tid; 4 a = ixj; 5 } else { 6 b = ixj; 7 a = tid; 8 } 9 if (sh[b] > sh[a]) { 10 swap(sh[b], sh[a]); 11 }
優化之後的控制流圖變成這樣(效能提升6.7%):
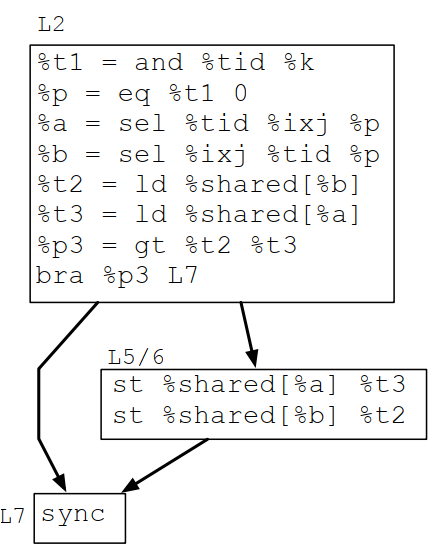
第二輪優化,2個分岔變成1個:
1 int p = (tid & k) == 0; 2 unsigned b = p ? tid : ixj; 3 unsigned a = p ? ixj : tid; 4 if (sh[b] > sh[a]) { 5 swap(sh[b], sh[a]); 6 }
實際上?表示式也是完成分岔的功能,但由於大多數指令集都有專門的問號表示式的指令,所以巧妙使用問號表示式將第一重分岔消掉,改進之後的CFG是這樣的(效能提升9.2%):
11.3.3 總結
效能優化過程主要是消滅分岔,那前面提到的profile資料對這個效能優化有幫助麼?
理論上不論profile資料是什麼樣的,能消滅的分岔肯定優先消滅掉。profile資料對分岔消除的提示是儘可能優先消除執行時間比較長,執行次數比較多的分岔。
拋開分岔問題本身,profile的資料會提示優化執行時間和執行次數比較多的BB。
11.4 分岔的靜態檢測
11.4.1 分岔變數和統一變數
分岔變數(Divergent Variables):如果一個變數對不同執行緒會出現不同的值,則稱該變數為分岔變數。
統一變數(Uniform Variables):如果一個變數在不同執行緒呈現完全相同的值,則稱該變數為統一變數。
成為分岔變數的幾種場景:
- tid是分岔變數
- 原子操作產生的變數是分岔變數
- 如果v對分岔變數有資料依賴,則v也是分岔變數
- 如果v對分岔變數有控制依賴,則v也是分岔變數
分岔變數在資料流圖和控制流圖上具有傳播性。
11.4.2 找到依賴
在一個非SSA的程式裡面,找到某個變數是分岔變數還是非分岔變數是有歧義的,因為一個變數被多次賦值,可能有些賦值生成統一變數,有些賦值生成分岔變數。
但在SSA格式程式中,變數的分岔屬性值就要容易確定的多。
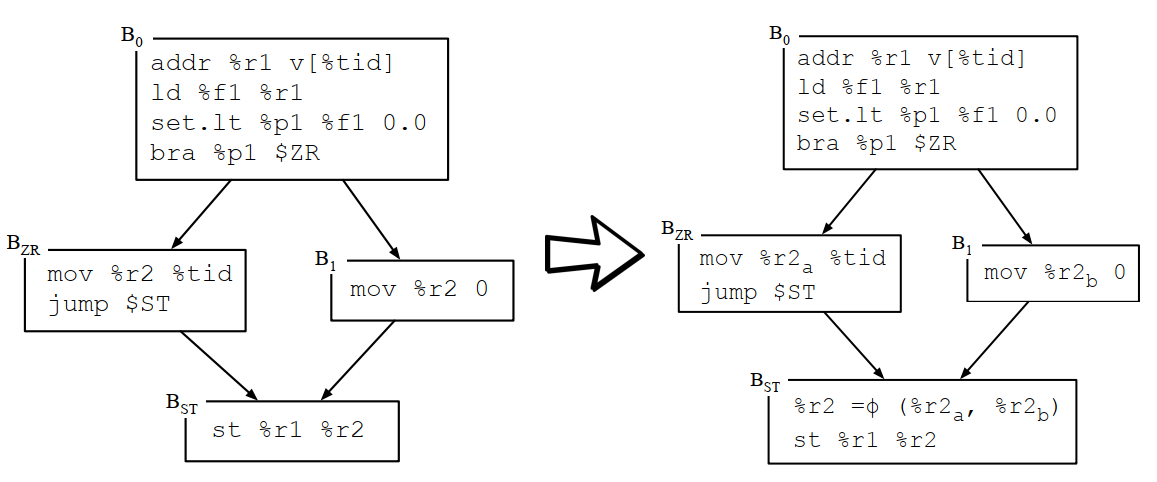
例如下面的例子中r2在未SSA化之前,可能是分岔變數,也可能是統一變數。右邊SSA化之後,r2a和r2是分岔變數,r2b是統一變數。
11.4.3 資料依賴圖DDG
在ILP裡面,我們曾經說過IDG,指令依賴圖,這裡說的資料依賴圖和IDG其實也是類似的,關注的都是資料依賴,不過IDG關注的是指令執行過程的依賴,DDG關注的是資料本身的依賴。
對下面的CFG,會生成什麼樣的DDG?
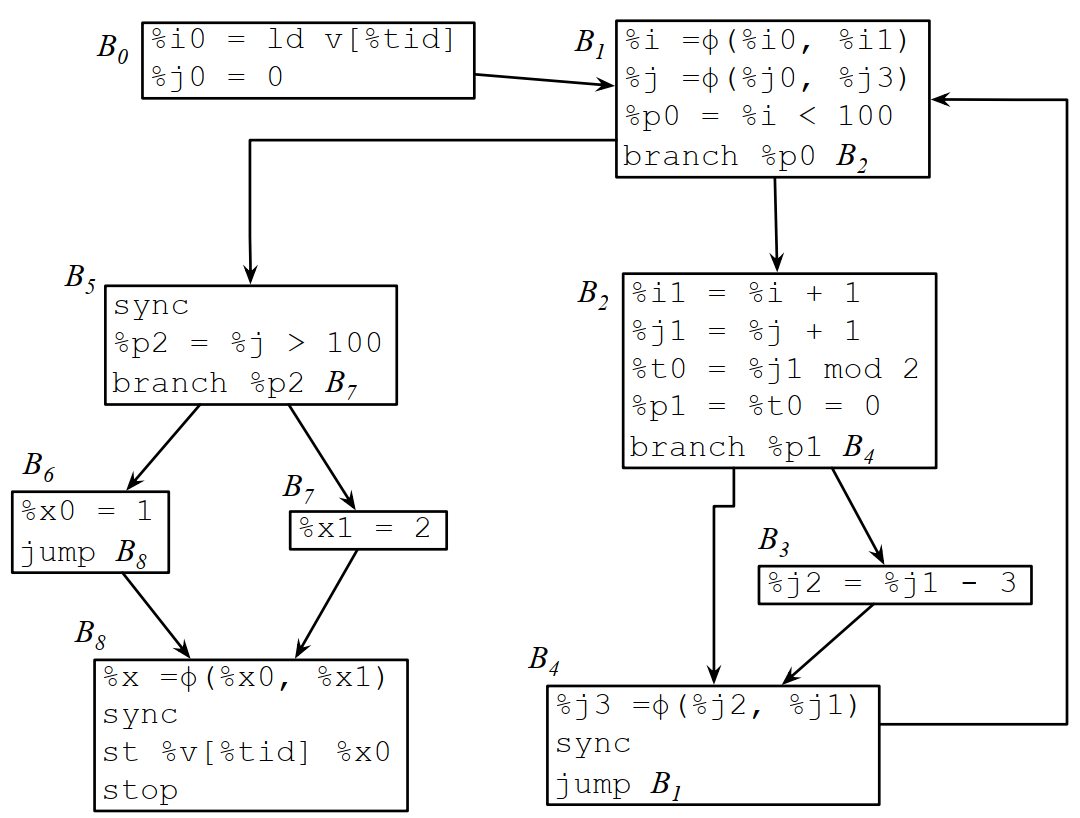
對應的DDG如下:
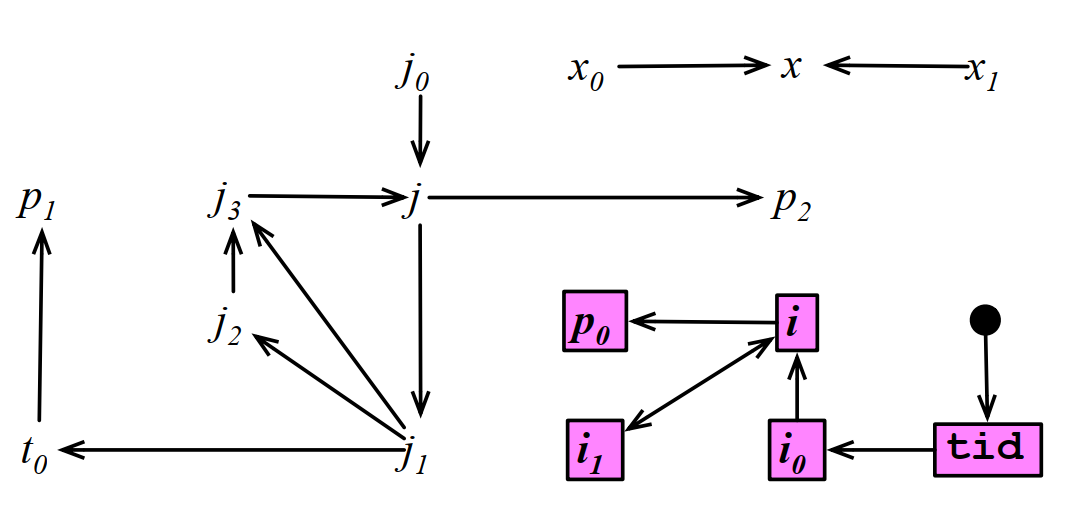
這個資料依賴對ILP可能已經足夠了,但對分岔分析還不夠,有些分岔變數漏掉了!
例如j的值依賴B1裡面的分支,這個分支的條件是個分岔變數,這也會導致j變成分岔變數。所以除了資料依賴外,還需要考慮控制依賴。
11.4.4 控制依賴圖
影響區:一個分支斷言的影響區是該斷言影響的基本塊的集合。
後支配:相對於支配屬性而言,後支配屬性是一個節點B2走到程式結束的每條路徑都要經過B1,則稱為B1後支配B2。
直接後支配:如果節點B1後支配節點B2,並且不存在一個節點B3,B1後支配B3,並且B3後支配B2,則稱為B1是B2的直接後支配。
一個分支斷言的影響區是該分支所在BB到分支的直接後支配BB。
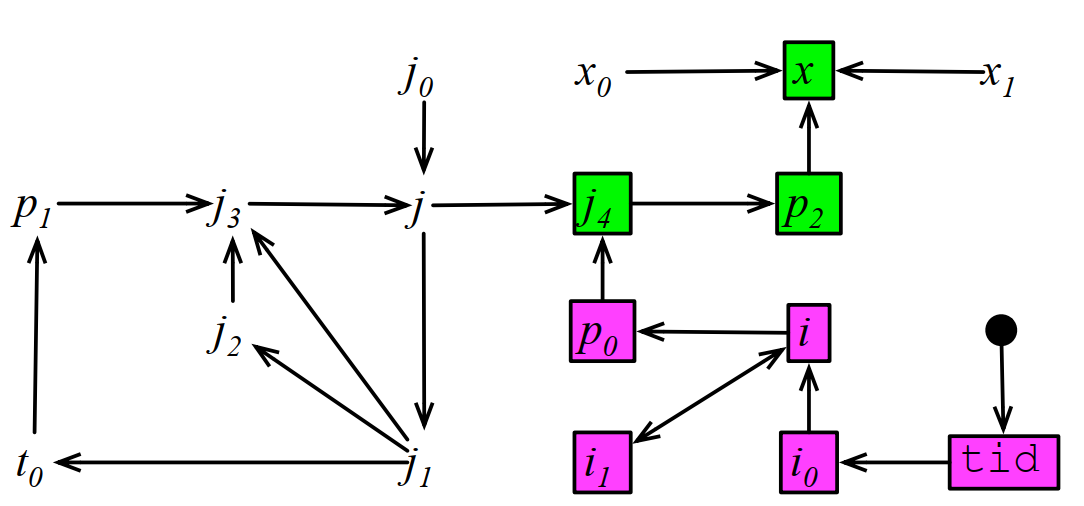
為了方便表示控制依賴導致的後支配,我們將φ函數升級擴充套件成為帶斷言的φ函數。例如下圖中的x本來只對x0和x1有資料依賴,現在它也對p2有資料依賴:
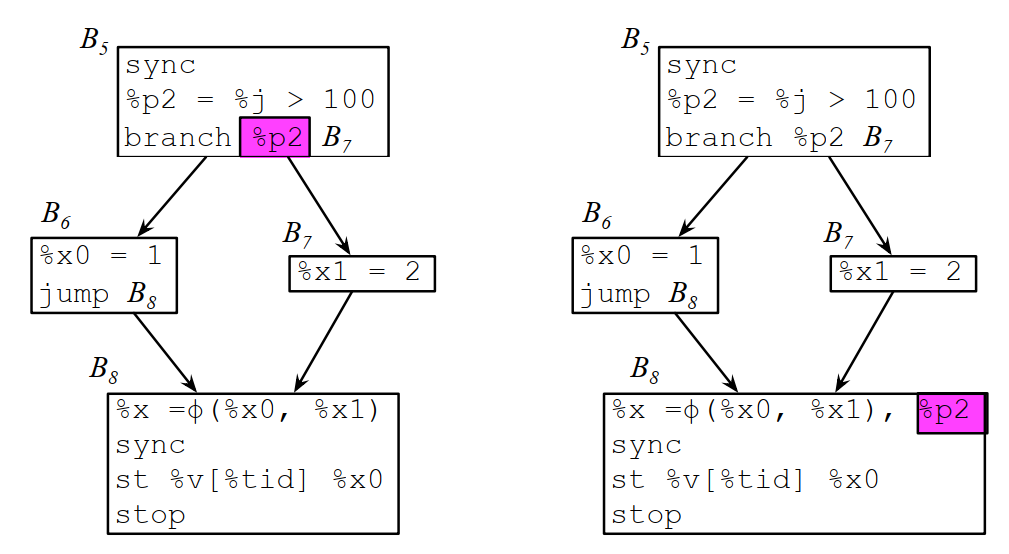
升級φ函數之後的資料依賴圖:
11.5 分岔優化
11.5.1 同步柵欄刪除
CUDA的ptx指令集預設分支命令都是會產生分岔的,除非特定加上.uni字尾:
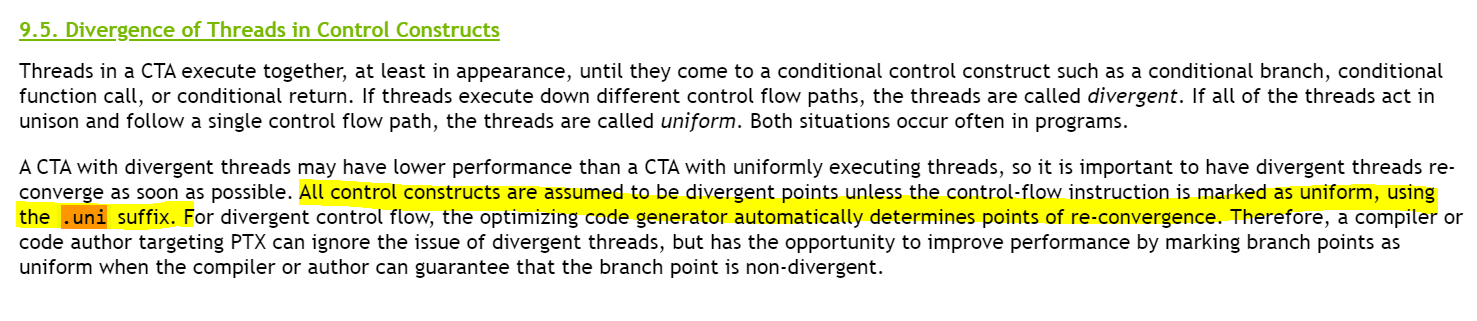
所以在明確肯定不會產生分岔變數的分支命令,可以加上.uni字尾:
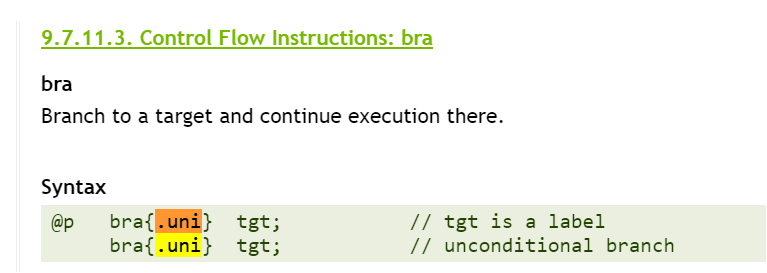
上面的截圖來自PTX ISA :: CUDA Toolkit Documentation (nvidia.com)
11.5.2 暫存器分配
相對於傳統單核的暫存器分配,溢位處理都是直接放到記憶體中,GPU場景下的暫存器溢位可以選擇溢位老本地記憶體和全域性記憶體,部分在多個核中共用的變數,還可以考慮放到共用記憶體中。
11.5.3 資料重定位
準排序演演算法
將資料切片,每個執行緒處理一個切片,並在每個切片排序完之後,再拷貝回來:
1 __global__ static void maxSort1(int *values, int N) { 2 // 1) COPY-INTO: Copy data from the values vector 3 // into shared memory: 4 __shared__ int shared[THREAD_WORK_SIZE * NUM_THREADS]; 5 for (unsigned k = 0; k < THREAD_WORK_SIZE; k++) { 6 unsigned loc = k * blockDim.x + threadIdx.x; 7 if (loc < N) { 8 shared[loc] = values[loc + blockIdx.x * blockDim.x]; 9 } 10 } 11 __syncthreads(); 12 // 2) SORT: each thread sorts its chunk of data 13 // with a small sorting net. 14 int index1 = threadIdx.x * THREAD_WORK_SIZE; 15 int index2 = threadIdx.x * THREAD_WORK_SIZE + 1; 16 int index3 = threadIdx.x * THREAD_WORK_SIZE + 2; 17 int index4 = threadIdx.x * THREAD_WORK_SIZE + 3; 18 if (index4 < N) { 19 swapIfNecessary(shared, index1, index3); 20 swapIfNecessary(shared, index2, index4); 21 swapIfNecessary(shared, index1, index2); 22 swapIfNecessary(shared, index3, index4); 23 swapIfNecessary(shared, index2, index3); 24 } 25 __syncthreads(); 26 // 3) SCATTER: the threads distribute their data 27 // along the array. 28 __shared__ int scattered[THREAD_WORK_SIZE * 300]; 29 unsigned int nextLoc = threadIdx.x; 30 for (unsigned i = 0; i < THREAD_WORK_SIZE; i++) { 31 scattered[nextLoc] = shared[threadIdx.x * THREAD_WORK_SIZE + i]; 32 nextLoc += blockDim.x; 33 } 34 __syncthreads(); 35 // 4) COPY-BACK: Copy the data back from the shared 36 // memory into the values vector: 37 for (unsigned k = 0; k < THREAD_WORK_SIZE; k++) { 38 unsigned loc = k * blockDim.x + threadIdx.x; 39 if (loc < N) { 40 values[loc + blockIdx.x * blockDim.x] = scattered[loc]; 41 } 42 } 43 }
11.6 分岔研究歷史
GPU的歷史都比較新,所以關於GPU的分岔分析資料也比較新:
-
Ryoo, S. Rodrigues, C. Baghsorkhi, S. Stone, S. Kirk, D. and Hwu, Wen-Mei. "Optimization principles and application performance evaluation of a multithreaded GPU using CUDA", PPoPP, p 73-82 (2008) CUDA介紹
-
Coutinho, B. Diogo, S. Pereira, F and Meira, W. "Divergence Analysis and Optimizations", PACT, p 320-329 (2011) 分岔分析與優化
-
Sampaio, D. Martins, R. Collange, S. and Pereira, F. "Divergence Analysis", TOPLAS, 2013. 分岔分析