強化學習-學習筆記15 | 連續控制
本系列的完結篇,介紹了連續控制情境下的強化學習方法,確定策略 DPG 和隨機策略 AC 演演算法。
15. 連續控制
15.1 動作空間
-
離散動作空間
- \(Action \ space \ \mathcal{A}={left,right,up}\)
- 比如超級瑪麗遊戲中的向上\向左\向右;
- 此前博文討論的,都是離散的控制,動作有限。
-
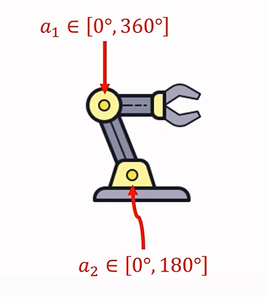
連續動作空間
-
\(Action \ space \ \mathcal{A}=[0°,360°]×[0°,180°]\)
-
比如機械臂,如果具有兩個運動關節:
-
-
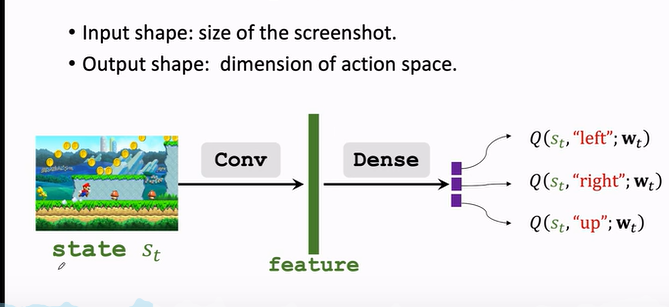
價值網路 DQN 可以解決離散動作控制的問題,因為 DQN 輸出的是有限維度的向量。
-
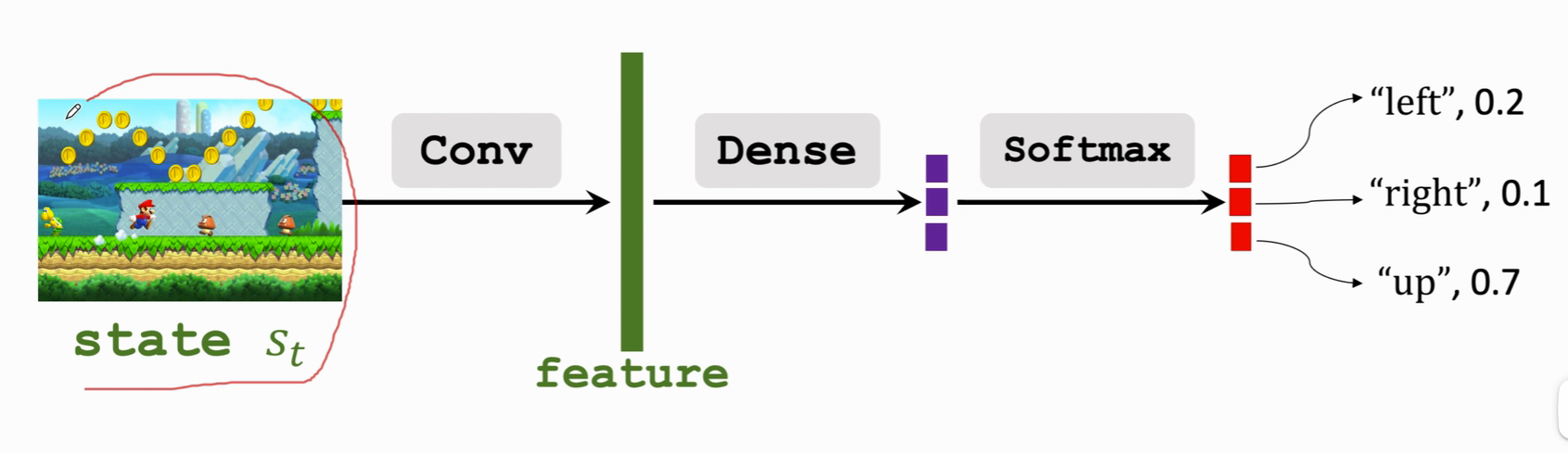
策略網路也同樣。
-
所以此前的方法不能簡單照搬到連續控制。要想應用到連續控制上,可以採用 連續空間離散化。
連續空間離散化:
- 比如機械臂進行二維網格劃分。那麼有多少個格子,就有多少種動作。
- 缺點:假設d為連續動作空間的自由度,動作離散化後的數量會隨著d的增加呈現指數增長,從而造成維度災難。動作太多會學不好DQN 或 策略網路。
- 所以 離散化 適合自由度較小的問題。
另外還有兩個方法:
- 使用確定策略網路(\(Deterministic \ policy \ network\))
- 使用隨機策略(\(Stochastic \ policy \ network\))。
15.2 DPG | 確定策略
a. 基礎瞭解
Deterministic Policy Gradient.確定策略梯度,可以用於解決連續控制問題。後續引入深度神經網路,就是著名的 DDPG。
DPG 是 Actor-Critic 方法的一種。結構圖如下:
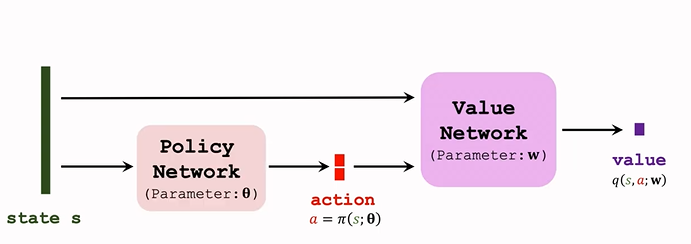
-
策略網路 actor
- 策略網路是確定性的函數 \(a=\pi(s;\theta)\)
- 輸入是狀態 s ;輸出是一個具體的動作 s;即給定狀態輸出具體的動作,無隨機性。
- 輸出的動作是可以指導運動的實數或向量。
-
價值網路 critic
- 記作 \(q(s,a;w)\)
- 輸入是狀態 s 和 動作 a,基於狀態 s,評價動作 a 的好壞程度,輸出一個分數 q;
-
訓練兩個神經網路,讓兩個網路越來越好。
-
用 TD 演演算法更新 價值網路:
-
觀測 transition:\((s_t,a_t,r_t,s_{t+1})\)
-
價值網路預測 t 時刻 的動作價值 \(q_t=q(s_t,a_t;w)\)
-
價值網路預測 t+1時刻的價值:\(q_{t+1}=q(s_{t+1},a'_{t+1};w)\)
注意這裡的 \(a'_{t+1}\) 是 策略網路 t+1 時刻預選出來的動作,尚未執行。
-
TD error:\(\delta_t=q_t-\underbrace{(r_t+\gamma\cdot q_{t+1})}_{TD \ target}\)
-
更新引數:\(w\leftarrow w-\alpha\cdot\delta_t \cdot \frac{\partial q(s_t,a_t;w)}{\partial w}\)
-
-
策略網路用 DPG 演演算法 更新
b. 演演算法推導
對 DPG 演演算法進行推導。
-
訓練價值網路的目標是,讓價值網路的輸出 q 越大越好。
-
而在DPG 的網路結構中,在給定狀態時,動作是確定的(策略網路會給出一個確定的動作),且價值網路固定,那麼影響輸出的就是策略網路的引數 \(\theta\)。
-
所以更新 θ 使價值 q 更大;
-
計算價值網路關於 θ 的梯度 DPG:\(g=\frac{\partial q(s,\pi(s;\theta))}{\partial\theta}=\frac{\partial a}{\partial\theta}\cdot\frac{\partial q(s,a;w)}{\partial a}\)
鏈式法則,讓梯度從價值 q 傳播到動作 a;再從 a 傳播到策略網路。
-
梯度上升更新 \(\theta\):\(\theta\leftarrow \theta+\beta\cdot g\)
c. 演演算法改進1 | 使用 TN
上面的 DPG 是比較原始的版本,用 Target Network 可以提升效果。Target Network 在此前第11篇中講過,上文中的演演算法也會出現高估問題或者低估問題。
因為用自身下一時刻的估計來更新此時刻的估計。
Target Network 方法的過程是:
- 用 價值網路 計算 t 時刻的價值: \(q_t=q(s_t,q_t;w)\)
- TD target (不同之處):
- 改用兩個不同的神經網路計算 TD target 。
- 用 target policy network 代替 策略網路 來預選 \(a'_{t+1}\),網路結構和策略網路一樣,但引數不一樣;記為 \(a'_{t+1}=\pi(s_{s+1};\theta^-)\)
- 用 target value network 代替 價值網路 計算 \(q_{t+1}\),與價值網路結構相同,引數不同;記為 \(q_{t+1}=q(s_{t+1},a'_{t+1};w^-)\)
- 後續 TD error 以及 引數更新 與 原始演演算法一致,具體見第11篇
d. 完整過程
- 策略網路做出選擇:\(a=\pi(s;\theta)\)
- 用 DPG 更新 策略網路:\(\theta\leftarrow \theta+ \beta\cdot\frac{\partial a}{\partial\theta}\cdot\frac{\partial q(s,a;w)}{\partial a}\)
- 價值網路計算 \(q_t\):\(q_t=q(s,a;w)\)
- Target Networks 計算 \(q_{t+1}\)
- TD error:\(\delta_t=q_t-(r_t+\gamma\cdot q_{t+1})\)
- 梯度下降:\(w\leftarrow w-\alpha\cdot\delta_t \cdot\frac{\partial q(s,a;w)}{\partial w}\)
同樣,之前講過的其他改進也可以用於這裡,如經驗回放、multi-step TD Target 等。
15.3 確定策略 VS 隨機策略
DPG 使用的是 確定策略網路,跟之前的隨機策略不同。
| \ | 隨機策略 | 確定策略 |
|---|---|---|
| 策略函數 | $\pi(a | s;\theta)$ |
| 輸出 | 每個動作一個概率值,向量 | 確定的動作 |
| 控制方式 | 根據概率分佈抽樣a | 輸出動作並執行 |
| 應用 | 大多是離散控制,用於連續的話結構大有不同 | 連續控制 |
15.4 | 隨機策略
這部分來介紹怎麼在連續控制問題中應用隨機策略梯度。
構造一個策略網路,來做連續控制,這個策略網路與之前學過的相差很大,以機械臂為例:
a. 自由度為 1 的連續動作空間
先從一個簡單的情況研究起,自由度為1,這時動作都是實數 \(\mathcal{A}\subset \mathbb{R}\)
- 記均值為 \(\mu\),標準差是 \(\sigma\) ,都是狀態 s 的函數,輸出是一個實數
- 假定我們的策略函數是正態分佈函數\(N(\mu,\sigma^2)\):\(π(a|s)=\frac{1}{\sqrt{6.28}\sigma}\cdot exp(-\frac{(a-\mu)^2}{2\sigma^2})\)
- 根據策略函數隨機抽樣一個動作
b. 自由度 >1 的連續動作空間
而機械臂的自由度通常是3或者更高,把自由度記為 d,動作 a 是一個 d 維的向量。
- 用粗體 \(\boldsymbol{\mu}\) 表示均值,粗體 \(\boldsymbol{\sigma}\) 表示標準差,都是狀態 s 的函數,輸出是都是 d 維向量
- 用 \(\mu_i\) 和 \(\sigma_i\) 表示 \(\boldsymbol{\mu}(s)\) 和 \(\boldsymbol{\sigma}(s)\) 輸出的第 i 個元素,假設各個維度獨立,則可以表示成 a 中的函數連乘
- \(π(a|s)=\Pi_{i=1}^d \frac{1}{\sqrt{6.28}\sigma_i}\cdot exp(-\frac{(a_i-\mu_i)^2}{2\sigma_i^2})\)
但是問題是,我們不知道 具體的 \(\mu , \sigma\),我們用神經網路來近似它們。
c. 函數近似
- 用神經網路 \(\mu(s;\theta^\mu)\) 近似 \(\mu\)
用神經網路 \(\sigma(s;\theta^\sigma)\)近似 \(\sigma(s)\),實際上這樣效果並不好,近似方差的對數更好:\(\boldsymbol{\rho_i=ln\sigma_i^2},for \ i=1,...,d.\)- 即用神經網路 \(\boldsymbol\rho(s;\boldsymbol{\theta^\rho})\) 近似 \(\boldsymbol\rho\);
網路結構如下:
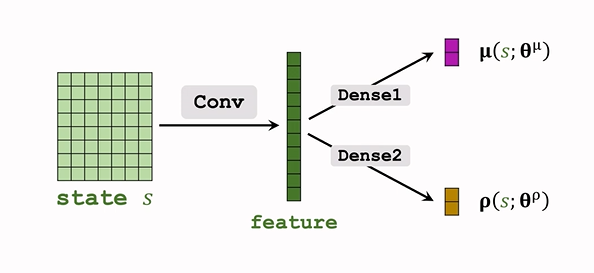
d. 連續控制
-
觀測到 狀態 s,輸入神經網路;
-
神經網路輸出 \(\hat\mu=\mu(s;\theta^\mu),\hat\rho=\rho(s;\theta^\rho)\),都是 d 維度
-
\(\hat\rho\) 計算 \(\hat\sigma_i^2=\exp(\hat\rho_i)\)
-
隨機抽樣得到動作 a :\(a_i\sim\mathcal{N}(\hat\mu_i,\hat\sigma_i^2)\)
這個正態分佈是假定的策略函數。
e. 訓練策略網路
1. 輔助神經網路
Auxiliary Network, 計算策略梯度時對其求導。
-
隨機策略梯度為:\(g(a)=\frac{\partial ln\pi(a|s;\theta)}{\partial\theta}\cdot Q_\pi(s,a)\)
-
計算 \(\pi\) 的對數。
-
策略網路為:\(\pi(A|s;\theta^\mu)=\Pi_{i=1}^d\frac{1}{\sqrt{6.28}}\cdot\exp(-\frac{(a_i--\mu)^2}{2\delta^2_i})\),輸出是一個概率密度,表示在某點附近的可能性大小
雖然可以算出來某個動作的概率,但實際上我們只需要知道 均值 和 方差,來做隨機抽樣即可,所以實際上我們用不到這個策略函數 \(\pi\)
-
由上面策略梯度公式知:我們需要策略 \(\pi\) 的對數,所以訓練時,我們會用到策略 \(\pi\) 的對數,而不是 \(\pi\) 本身:
\[\ln\pi(a|s;\theta^\mu,\theta^\rho)=\sum_{i=1}^d[-\ln\delta_i-\frac{(a_i-\mu_i)^2}{2\delta^2}]+const \] -
由於神經網路輸出的時方差對數\(\rho_i\),而不是\(\delta^2_i\),所以做個替換:\(\delta_i^2=\exp\rho_i\)
-
\(\ln\pi(a|s;\theta^\mu,\theta^\rho)=\sum_{i=1}^d[-\ln\delta_i-\frac{(a_i-\mu_i)^2}{2\delta^2}]+const\\=\sum_{i=1}^d[-\frac{\rho_i}{2}-\frac{(a_i-\mu_i)^2}{2\exp(\rho_i)}]+const\)
-
這樣 神經網路的對數 就表示成了 \(\rho,\mu\) 的形式,記 \(\theta=(\theta^\mu,\theta^\rho)\)
-
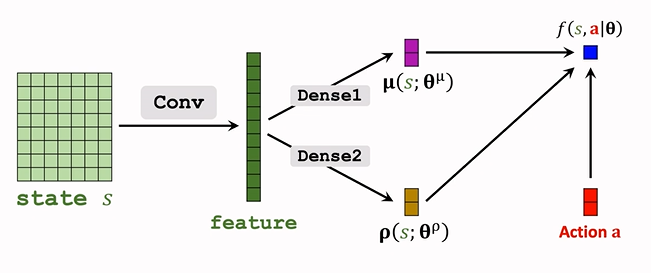
把上式連加的一項記為 \(f(s,a;\theta)\),這就是輔助神經網路 Auxiliary Network.用於幫助訓練。
-
\(f(a,s;\theta)=\sum_{i=1}^d[-\frac{\rho_i}{2}-\frac{(a_i-\mu_i)^2}{2\exp(\rho_i)}]\)
-
f 的輸入是 s, a ,依賴於 \(\rho,\mu\),所以引數也是 \(\theta\)
-
結構如下:
-
輸入為 \(\underbrace{\mu,\rho}_{s},a\),輸出為一個實數 f;
-
f 依賴於折積層和全連線層的引數,所以接下來反向傳播,可以算出 f 關於全連線層 Dense 引數的梯度,再算出 關於折積層引數的梯度:
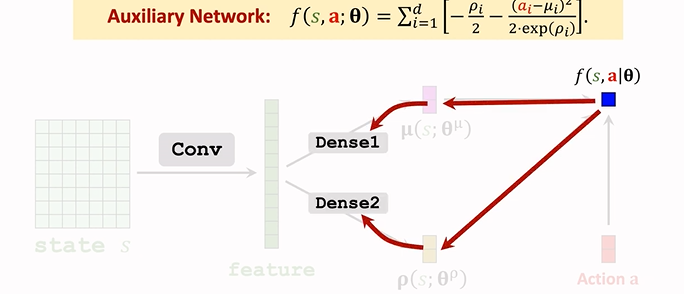
用 \(\frac{\partial f}{\partial \theta}\) 來表示梯度。
-
-
2.策略梯度演演算法訓練策略網路
-
隨機策略梯度:\(g(a)=\frac{\partial ln\pi(a|s;\theta)}{\partial\theta}\cdot Q_\pi(s,a)\)
-
輔助神經網路:\(f(s,a;\theta)=\ln\pi(a|s;\theta)+const\)
-
可以注意到,f 的梯度和 \(\ln\pi\) 的梯度相同,可以用前者梯度代替後者,即
\[g(a)=\frac{\partial f(s,a;\theta)}{\partial \theta}\cdot Q_\pi(s,a) \]而 f 作為一個神經網路,成熟的
pytorch等可以對其自動求導。 -
Q 還未知,需對其做近似
- 具體參見 第14篇
- Reinforce
- 用觀測到的回報 \(u_t\) 來近似 \(Q_\pi\)
- 更新策略網路:\(\theta\leftarrow\theta+\beta\cdot\frac{\partial f(s,a;\theta)}{\partial\theta}\cdot u_t\)
- Actor-Critic(A2C)
- 用價值網路 \(q(s,a;w)\) 近似 \(Q_\pi\)
- 更新策略網路:\(\theta\leftarrow\theta+\beta\cdot\frac{\partial f(s,a;\theta)}{\partial\theta}\cdot q(s,a;w)\)
- 而新引入的價值網路 \(q(S,a;w)\),用 TD 演演算法來進行學習。
15.5 總結
-
連續動作空間有無窮多種動作數量
-
解決方案包括:
-
離散動作空間,使用標準DQN或者策略網路進行學習,但是容易引起維度災難
-
使用確定策略網路進行學習
沒有隨機性,某些情境下不合適。
-
隨機策略網路(\(\mu\) 與 \(\sigma^2\))
-
-
隨機策略的訓練過程:
- 構造輔助神經網路 \(f(s,a;\theta)\) 計算策略梯度;
- 策略梯度近似演演算法包括:reinforce、Actor-Critic 演演算法
- 可以改進 reinforce 演演算法,使用帶有 baseline 的 reinforce 演演算法
- 可以改進 Actor-Critic 演演算法,使用 A2C 演演算法
本系列完結撒花!
x. 參考教學
- 視訊課程:深度強化學習(全)_嗶哩嗶哩_bilibili
- 視訊原地址:https://www.youtube.com/user/wsszju
- 課件地址:https://github.com/wangshusen/DeepLearning
- 參考部落格:https://blog.csdn.net/Cyrus_May/article/details/124137445