強化學習-學習筆記14 | 策略梯度中的 Baseline
本篇筆記記錄學習在 策略學習 中使用 Baseline,這樣可以降低方差,讓收斂更快。
14. 策略學習中的 Baseline
14.1 Baseline 推導
-
在策略學習中,我們使用策略網路 \(\pi(a|s;\theta)\) 控制 agent,
-
狀態價值函數
\(V_\pi(s)=\mathbb{E}_{A\sim \pi}[Q_\pi(s,A)]=\sum\limits_{a}\pi(a|s;\theta)\cdot Q_\pi(a,s)\)
-
策略梯度:
\(\frac{\partial \ V_\pi(s)}{\partial \ \theta}=\mathbb{E}_{A\sim\pi}[\frac{\partial ln \pi(A|s;\theta)}{\partial \theta}\cdot Q_\pi(s,A)]\)
在策略梯度演演算法中引入 Baseline 主要是用於減小方差,從而加速收斂
Baseline 可以是任何 獨立於 動作 A 的數,記為 b。
Baseline的性質:
-
這個期望是0: \(\mathbb{E}_{A\sim\pi}[b\cdot \frac{\partial \ \ln\pi(A|s;\theta)}{\partial\theta}]=0\)
-
因為 b 不依賴 動作 A ,而該式是對 A 求期望,所以可以把 b 提出來,有:\(b\cdot \mathbb{E}_{A\sim\pi}[\frac{\partial \ \ln\pi(A|s;\theta)}{\partial\theta}]\)
-
而期望 E 這一項可以展開:\(b\sum_a \pi(a|s;\theta)\cdot\frac{\partial\ln_\pi(A|s;\theta)}{\partial\theta}\)
這個性質在策略梯度演演算法用到的的兩種形式有提到過。
-
用鏈式法則展開後面的導數項,即: \(\frac{\partial\ln_\pi(A|s;\theta)}{\partial\theta}={\frac{1}{\pi(a|s;\theta)}\cdot \frac{\partial\pi(a|s;\theta)}{\partial\theta}}\)
-
這樣整個式子為:\(b\sum_a \pi(a|s;\theta)\cdot{\frac{1}{\pi(a|s;\theta)}\cdot \frac{\partial\pi(a|s;\theta)}{\partial\theta}}=b\cdot \sum_a\frac{\partial\pi(a|s;\theta)}{\partial\theta}\)
-
由於連加是對於 a 進行連加,而內部求導是對於 θ 進行求導,所以求和符號可以和導數符號交換位置:
\(b\cdot \frac{\partial\sum_a\pi(a|s;\theta)}{\partial\theta}\)
這是數學分析中 級數部分 的內容。
-
而 \(\sum_a\pi(a|s;\theta)=1\),所以有\(b\cdot \frac{\partial 1}{\partial \theta}=0\)
-
根據上面這個式子的性質,可以向 策略梯度中新增 baseline
- 策略梯度 with baseline:$$\frac{\partial \ V_\pi(s)}{\partial \ \theta}=\mathbb{E}{A\sim\pi}[\frac{\partial ln \pi(A|s;\theta)}{\partial \theta}\cdot Q\pi(s,A)]- \mathbb{E}{A\sim\pi}[b\cdot \frac{\partial \ \ln\pi(A|s;\theta)}{\partial\theta}] \=\mathbb{E}{A\sim\pi}[\frac{\partial ln \pi(A|s;\theta)}{\partial \theta}\cdot(Q_\pi(s,A)-b)]$$
- 這樣引入b對期望 \(\mathbb{E}\) 沒有影響,為什麼要引入 b 呢?
- 策略梯度演演算法中使用的並不是 嚴格的上述式子,而是它的蒙特卡洛近似;
- b不影響期望,但是影響蒙特卡洛近似;
- 如果 b 好,接近 \(Q_\pi\),那麼會讓蒙特卡洛近似的方差更小,收斂速度更快。
14.2 策略梯度的蒙特卡洛近似
上面我們得到:\(\frac{\partial \ V_\pi(s_t)}{\partial \ \theta}=\mathbb{E}_{A_t\sim\pi}[\frac{\partial ln \pi(A_t|s_t;\theta)}{\partial \theta}\cdot(Q_\pi(s_t,A_t)-b)]\)
但直接求期望往往很困難,通常用蒙特卡洛近似期望。
-
令 \(g(A_t)=[\frac{\partial ln \pi(A_t|s_t;\theta)}{\partial \theta}\cdot(Q_\pi(s_t,A_t)-b)]\)
-
根據策略函數 \(\pi\) 隨機抽樣 \(a_t\) ,計算 \(g(a_t)\),這就是上面期望的蒙特卡洛近似;\(g(a_t)=[\frac{\partial ln \pi(a_t|s_t;\theta)}{\partial \theta}\cdot(Q_\pi(s_t,a_t)-b)]\)
-
\(g(a_t)\) 是對策略梯度的無偏估計;
因為:\(\mathbb{E}_{A_t\sim\pi}[g(A_t)]=\frac{\partial V_\pi(s_t)}{\partial\theta}\),期望相等。
-
\(g(a_t)\) 是個隨機梯度,是對策略梯度 \(\mathbb{E}_{A_t\sim\pi}[g(A_t)]\)的蒙特卡洛近似
-
在實際訓練策略網路的時候,用隨機梯度上升更新引數θ:\(\theta \leftarrow \theta+\beta\cdot g(a_t)\)
-
策略梯度是 \(g(a_t)\) 的期望,不論 b 是什麼,只要與 A 無關,就都不會影響 \(g(A_t)\) 的期望。為什麼不影響已經在 14.1 中講過了。
- 但是 b 會影響 \(g(a_t)\);
- 如果 b 選取的很好,很接近 \(Q_\pi\),那麼隨機策略梯度\(g(a_t)\)的方差就會小;
14.3 Baseline的選取
介紹兩種常用的 baseline。
a. b=0
第一種就是把 baseline 取0,即與之前相同:\(\frac{\partial \ V_\pi(s)}{\partial \ \theta}=\mathbb{E}_{A\sim\pi}[\frac{\partial ln \pi(A|s;\theta)}{\partial \theta}\cdot Q_\pi(s,A)]\)
b. b= \(V_\pi\)
另一種就是取 b 為 \(V_\pi\),而 \(V_\pi\) 只依賴於當前狀態 \(s_t\),所以可以用來作為 b。並且 \(V_\pi\) 很接近 \(Q_\pi\),可以降低方差加速收斂。
因為 \(V_\pi(s_t)=\mathbb{E}[Q_\pi(s_t,A_t)]\),作為期望,V 很接近 Q。
14.4 Reinforce with Baseline
把 baseline 用於 Reinforce 演演算法上。
a. 基本概念
-
折扣回報:\(U_t=R_t+\gamma\cdot R_{t+1}+\gamma^2\cdot R_{t+2}+...\)
-
動作價值函數:\(Q_\pi(s_t,a_t)=\mathbb{E}[U_t|s_t,a_t].\)
-
狀態價值函數:\(V_\pi(s_t)=\mathbb{E}_A[Q_\pi(s_t,A)|s_t]\)
-
應用 baseline 的策略梯度:使用的是上面第二種 baseline:
\(\frac{\partial \ V_\pi(s_t)}{\partial \ \theta}=\mathbb{E}_{A_t\sim\pi}[g(A_t)]=\mathbb{E}_{A_t\sim\pi}[\frac{\partial ln \pi(A_t|s_t;\theta)}{\partial \theta}\cdot(Q_\pi(s_t,A_t)-V_\pi(s_t))]\)
-
對動作進行抽樣,用 \(g(a_t)\) 做蒙特卡洛近似,為無偏估計(因為期望==策略梯度):\(a_t\sim\pi(\cdot|s_t;\theta)\)
\(g(a_t)\) 就叫做 隨機策略梯度,用隨機抽取的動作 對應的值來代替期望,是策略梯度的隨即近似;這正是蒙特卡洛方法的應用。
- \(g(a_t)=[\frac{\partial ln \pi(a_t|s_t;\theta)}{\partial \theta}\cdot(Q_\pi(s_t,a_t)-b)]\)
但上述公式中還是有不確定的項:\(Q_\pi \ \ V_\pi\),繼續近似:
-
用觀測到的 \(u_t\) 近似 \(Q_\pi\),因為 \(Q_\pi(s_t,a_t)=\mathbb{E}[U_t|s_t,a_t].\)這也是一次蒙特卡洛近似。
這也是 Reinforce 演演算法的關鍵。
-
用神經網路-價值網路 \(v(s;w)\) 近似 \(V_\pi\);
所以最終近似出來的 策略梯度 是:
當我們知道 策略網路\(\pi\)、折扣回報\(u_t\) 以及 價值網路\(v\),就可以計算這個策略梯度。
我們總計做了3次近似:
-
用一個抽樣動作 \(a_t\) 帶入 \(g(a_t)\) 來近似期望;
-
用回報 \(u_t\) 近似動作價值函數\(Q_\pi\);
1、2都是蒙特卡洛近似;
-
用神經網路近似狀態價值函數\(V_\pi\)
函數近似。
b. 演演算法過程
我們需要建立一個策略網路和一個價值網路,後者輔助訓練前者。
- 策略網路:

- 價值網路:

- 引數共用:

用 Reinforce 演演算法訓練策略網路,用迴歸方法訓練價值網路。
-
在一次訓練中 agent 獲得軌跡:\(s_1,a_1,r_1,s_2,a_2,r_2,...\)
-
計算 \(u_t=\sum_{i=t}^n\gamma^{i-t}r^i\)
-
更新策略網路
-
得到策略梯度:\(\frac{\partial \ V_\pi(s_t)}{\partial \ \theta}\approx\frac{\partial ln \pi(a_t|s_t;\theta)}{\partial \theta}\cdot(u_t-v(s;w))\)
-
梯度上升,更新引數:\(\theta\leftarrow \theta + \beta\cdot\frac{\partial\ln\pi(a_t|s_t;\theta)}{\partial\theta}\cdot(u_t-v(s_t;w))\)
記 \(u_t-v(s_t;w)\) 為 \(-\delta_t\)
\(\theta\leftarrow \theta - \beta\cdot\frac{\partial\ln\pi(a_t|s_t;\theta)}{\partial\theta}\cdot \delta_t\)
-
-
更新價值網路
回顧一下價值網路的目標:\(V_\pi\) 是 \(U_t\) 的期望,訓練價值網路是讓v接近期望 \(V_\pi\)
-
用觀測到的 \(u_t\) 擬合 v,兩者之間的誤差記為
prediction error:\(\delta_t=v(s_t;w)-u_t\),
-
求導得策略梯度: \(\frac{\partial \delta^2/2}{\partial w}=\delta_t\cdot \frac{\partial v(s_t;w)}{\partial w}\)
-
梯度下降更新引數:\(w\leftarrow w-\alpha\cdot\delta_t\cdot\frac{\partial v(s_t;w)}{\partial w}\)
-
-
如果軌跡的長度為n,可以對神經網路進行n次更新
14.5 A2C演演算法
a.基本概念
Advantage Actor Critic. 把 baseline 用於 Actor-Critic 上。
所以需要一個策略網路 actor 和一個價值網路 critic。但與 第四篇筆記AC演演算法有所不同。
-
策略網路還是 \(\pi(a|s;\theta)\),而價值網路是 \(v(s;w)\),是對\(V_\pi\) 的近似,而不是第四篇筆記中的 \(Q_\pi\)。
因為 V 不依賴於動作,而 Q 依賴動作和狀態,故 近似V 的方法可以引入 baseline。
-
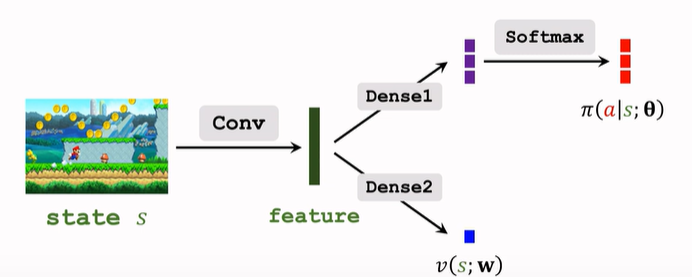
A2C 網路結構:
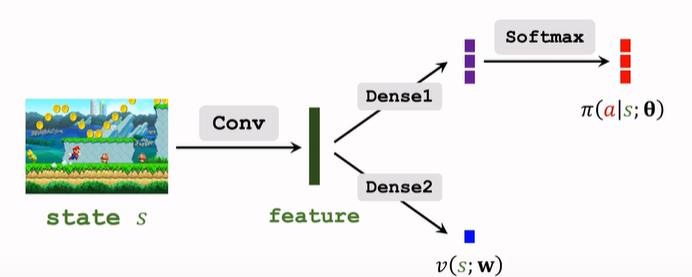
與 14.4 中的結構相同,區別在於訓練方法不同。
b. 訓練過程
-
觀察到一個 transition(\(s_t,a_t,r_t,s_{t+1}\))
-
計算 TD target:\(y_t=r_t+\gamma\cdot v(s_{t+1};w)\)
-
計算 TD error:\(\delta_t=v(s_t;w)-y_t\)
-
用策略網路梯度更新策略網路θ:\(\theta\leftarrow \theta-\beta\cdot\delta_t\cdot\frac{\partial\ln\pi(a_t|s_t;\theta)}{\partial \theta}\)
注意!這裡的 \(\delta_t\) 是前文中的 「\(u_t-v(s_t;w)\) 為 \(-\delta_t\)」
-
用TD更新價值網路:\(w\leftarrow w-\alpha\cdot\delta_t\cdot\frac{\partial v(s_t;w)}{\partial w}\)
c. 數學推導
A2C的基本過程就在上面,很簡潔,下面進行數學推導。
1.價值函數的性質
-
\(Q_\pi\)
-
TD演演算法推導時用到過這個式子:\(Q_\pi(s_t,a_t)=\mathbb{E}_{S_{t+1},A_{t+1}}[R_t+\gamma\cdot Q_\pi(S_{t+1},A_{t+1})]\)
-
隨機性來自 \(S_{t+1},A_{t+1}\),而對之求期望正好消掉了隨機性,可以把對 \(A_{t+1}\) 的期望放入括號內,\(R_t\) 與 \(A_{t+1}\) 無關,則有 定理一:
\(Q_\pi(s_t,a_t)= \mathbb{E}_{S_{t+1}}[R_t+\gamma\cdot \mathbb{E}_{A_{t+1}}[Q_\pi(S_{t+1},A_{t+1})]\\=\mathbb{E}_{S_{t+1}}[R_t+\gamma\cdot V_\pi(s_{t+1})]\)
-
即:\(Q_\pi(s_t,a_t)=\mathbb{E}_{S_{t+1}}[R_t+\gamma\cdot V_\pi(s_{t+1})]\)
-
-
\(V_\pi\)
-
根據定義: \(V_\pi(s_t)=\mathbb{E}[Q_\pi(s_t,A_t)]\)
-
將 Q 用 定理一 替換掉:
\[V_\pi(s_t)=\mathbb{E}_{A_t}\mathbb{E}_{S_{t+1}}[R_t+\gamma\cdot V_\pi(S_{t+1})]\\=\mathbb{E}_{A_t,S_{t+1}}[R_t+\gamma\cdot V_\pi(S_{t+1})] \] -
這就是 定理二:\(V_\pi(s_t)=\mathbb{E}_{A_t,S_{t+1}}[R_t+\gamma\cdot V_\pi(S_{t+1})]\)
-
這樣就將 Q 和 V 表示為期望的形式,A2C會用到這兩個期望,期望不好求,我們是用蒙特卡洛來近似求期望:
-
觀測到 transition(\(s_t,a_t,r_t,s_{t+1}\))
-
\(Q_\pi\)
- \(Q_\pi(s_t,a_t)\approx r_t+\gamma\cdot V_\pi(s_{t+1})\)
- 訓練策略網路;
-
\(V_\pi\)
- \(V_\pi(s_t)\approx r_t+\gamma\cdot V_\pi(s_{t+1})\)
- 訓練價值網路,這也是TD target 的來源;
2. 更新策略網路
即使用 baseline 的策略梯度演演算法。
-
\(g(a_t)=[\frac{\partial ln \pi(a_t|s_t;\theta)}{\partial \theta}\cdot(Q_\pi(s_t,a_t)-V_\pi(s_t))]\) 是策略梯度的蒙特卡洛近似。
-
前面Dueling Network提到過,\(Q_\pi-V_\pi\)是優勢函數 Advantage Function.
這也是 A2C 的名字來源。
-
Q 和 V 都還不知道,需要做近似,14.5.c.1 中介紹了:
- \(Q_\pi(s_t,a_t)\approx r_t+\gamma\cdot V_\pi(s_{t+1})\)
- 所以是:\(g(a_t)\approx\frac{\partial ln \pi(a_t|s_t;\theta)}{\partial \theta}\cdot[(r_t+\gamma\cdot V_\pi(s_{t+1}))-V_\pi(s_t)]\)
- 對 \(V_\pi\) 進行函數近似 \(v(s;w)\)
- 則得最終:\(g(a_t)\approx\frac{\partial ln \pi(a_t|s_t;\theta)}{\partial \theta}\cdot[(r_t+\gamma\cdot v(s_{t+1;w}))-v(s_{t;w})]\)
用上式更新策略網路。
-
而 \(r_t+\gamma\cdot v(s_{t+1;w})\) 正是 TD target \(y_t\)
-
梯度上升更新引數:\(\theta\leftarrow \theta-\beta\cdot\frac{\partial\ln\pi(a_t|s_t;\theta)}{\partial \theta}\cdot (y_t-v(s_t;w))\)
這樣的梯度上升更好。
因為以上式子中都有 V,所以需要近似計算 V:
\(g(a_t)\approx\frac{\partial ln \pi(a_t|s_t;\theta)}{\partial \theta}\cdot\underbrace{[(r_t+\gamma\cdot V_\pi(s_{t+1}))-V_\pi(s_t)]}_{evaluation \ made \ by \ the \ critic}\)
3. 更新價值網路
採用 TD 演演算法 更新價值網路,根據 14.5.b 有如下式子:
- \(V_\pi(s_t)\approx r_t+\gamma\cdot V_\pi(s_{t+1})\)
- 對上式得 \(V_\pi\) 做函數近似, 替換為 \(v(s_t;w),v(s_{t+1;w})\);
- \(v(s_t;w)\approx \underbrace{r_t+\gamma\cdot v(s_{t+1};w)}_{TD \ target \ y_t}\)
- 訓練價值網路就是要讓 \(v(s;w)\) 接近 \(y_t\)
- TD error: \(\delta_t=v(s_t;w)-y_t\)
- 梯度: \(\frac{\partial\delta^2_t/2}{\partial w}=\delta_t\cdot\frac{\partial v(s_t;w)}{\partial w}\)
- 更新:\(w\leftarrow w-\alpha\cdot\delta_t\cdot\frac{\partial v(s_t;w)}{\partial w}\)
4. 有關的策略梯度
在A2C 演演算法中的策略梯度:\(g(a_t)\approx\frac{\partial ln \pi(a_t|s_t;\theta)}{\partial \theta}\cdot[(r_t+\gamma\cdot v(s_{t+1;w}))-v(s_{t;w})]\)
會有這麼一個問題,後面這一項是由價值網路給出對策略網路選出的動作進行打分,那麼為什麼這一項中沒有動作呢,沒有動作怎麼給動作打分呢?
- 注意這兩項:
- \((r_t+\gamma\cdot v(s_{t+1;w}))\) 是執行完 \(a_t\) 後作出的預測
- \(v(s_t;w)\) 是未執行 \(a_t\) 時作出的預測;
- 兩者之差意味著動作 \(a_t\) 對於 V 的影響程度
- 而在AC演演算法中,價值網路給策略網路的是 q,而在A2C演演算法中, 價值網路給策略網路的就是上兩式之差 advantage.

14.6 RwB 與A2C 的對比
- 兩者的神經網路結構完全一樣
-
不同的是價值網路
- RwB 的價值網路只作為 baseline,不評價策略網路,用於降低隨機梯度造成的方差;
- A2C 的價值網路時critic,評價策略網路;
-
RwB 是 A2C 的特殊形式。這一點下面 14.7 後會講。
14.7 A2C with m-step
單步 A2C 就是上面所講的內容,具體請見 14.5.b。
而多步A2C就是使用 m 個連續 transition:
- \(y_t=\sum_{i=0}^{m-1}\gamma^i\cdot r_{t+1}+\gamma^m\cdot v(s_{t+m};w)\)
- 具體參見m-step
- 剩下的步驟沒有任何改變,只是 TD target 改變了。
下面解釋 RwB 和 A2C with m-step 的關係:
- A2C with m-step 的TD target:\(y_t=\sum_{i=0}^{m-1}\gamma^i\cdot r_{t+1}+\gamma^m\cdot v(s_{t+m};w)\)
- 如果使用所有的獎勵,上面兩項中的第二項(估計)就不存在,而第一項變成了
- \(y_t=u_t=\sum_{i=t}^n \gamma^{i-t}\cdot r_i\)
- 這就是 Reinforce with baseline.
x. 參考教學
- 視訊課程:深度強化學習(全)_嗶哩嗶哩_bilibili
- 視訊原地址:https://www.youtube.com/user/wsszju
- 課件地址:https://github.com/wangshusen/DeepLearning