RT-Thread 元件 FinSH 使用時遇到的問題
一、FinSH 的移植與使用問題
FinSH元件輸入無反應的問題
- 現象:當開啟 finsh 元件後,控制檯會打相應的資訊,如下圖說是:
\ | /
- RT - Thread Operating System
/ | \ 3.1.5 build Jul 6 2022
2006 - 2020 Copyright by rt-thread team
do components initialization.
initialize rti_board_end:0 done
initialize finsh_system_init:0 done
RT-Thread Start......
msh >
但是輸入回車或任意內容時,無反應。當然導致這樣的現象有兩種可能,一種可能是未正常開啟相應的設定,第二種是未對接收字元的函數進行實現,具體看下面內容
- FinSH 元件在 rtconfig.h 中的設定,如下所示:
/* --------------------------------- RT-Thread 核心部分 --------------------------------- */
/* 表示核心物件的名稱的最大長度,若程式碼中物件名稱的最大長度大於宏定義的長度,
* 多餘的部分將被截掉。*/
#define RT_NAME_MAX 8
/* 位元組對齊時設定對齊的位元組個數。常使用 ALIGN(RT_ALIGN_SIZE) 進行位元組對齊。*/
#define RT_ALIGN_SIZE 4
/* 定義系統執行緒優先順序數;通常用 RT_THREAD_PRIORITY_MAX-1 定義空閒執行緒的優先順序 */
#define RT_THREAD_PRIORITY_MAX 32
/* 定義時鐘節拍,為 100 時表示 100 個 tick 每秒,一個 tick 為 10ms */
#define RT_TICK_PER_SECOND 1000
/* 檢查棧是否溢位,未定義則關閉 */
#define RT_USING_OVERFLOW_CHECK
/* 定義該宏開啟 debug 模式,未定義則關閉 */
#define RT_DEBUG
/* 開啟 debug 模式時:該宏定義為 0 時表示關閉列印元件初始化資訊,定義為 1 時表示啟用 */
#define RT_DEBUG_INIT 1
/* 開啟 debug 模式時:該宏定義為 0 時表示關閉列印執行緒切換資訊,定義為 1 時表示啟用 */
#define RT_DEBUG_THREAD 0
/* 定義該宏表示開啟勾點函數的使用,未定義則關閉 */
//#define RT_USING_HOOK
/* 定義了空閒執行緒的棧大小 */
#define IDLE_THREAD_STACK_SIZE 1024
FinSH 移植
FinSH 元件使用有三種種方式,如下:
-
通過 rt_hw_console_getchar() 函數獲取控制檯資料
FinSH 執行緒的使用方式主要是通過實現rt_hw_console_getchar()函數,獲取控制檯輸入的資料,具體方式看我之前的筆記,STM32 移植 RT-Thread 標準版的 FinSH 元件 。 -
通過外設驅動中的 資料流(stm32_getc函數) 獲取控制檯資料
具體實現方式見UART外設的移植,稍後我也會將我移植的過程發出來,有需要的可以看我之後的筆記。 -
通過外設驅動中的 中斷方式 獲取控制檯資料
中斷的方式包涵了DMA的方式獲取控制檯資料。
注意: 第二和第三中方式其實都是通過RT-Thread中的外設驅動獲取的,這裡我為啥會將 資料流和中斷 分開說明,是因為他們之間會引入一個新的問題,具體見之後的流程
二、裝置為空問題
-
現象:msh >(dev != RT_NULL) assertion failed at function:rt_device_read, line number:320
-
原因:出現這個現象主要是在註冊裝置的時候導致的,在註冊裝置的時候才用了資料流的方式回去了資料,如下所示:
/* 設定串列埠裝置 */ result = rt_hw_serial_register(&uart_obj[i].serial, uart_obj[i].config->name, RT_DEVICE_OFLAG_RDWR | RT_DEVICE_FLAG_INT_RX | RT_DEVICE_FLAG_INT_TX , NULL);相應的設定宏如下所示:
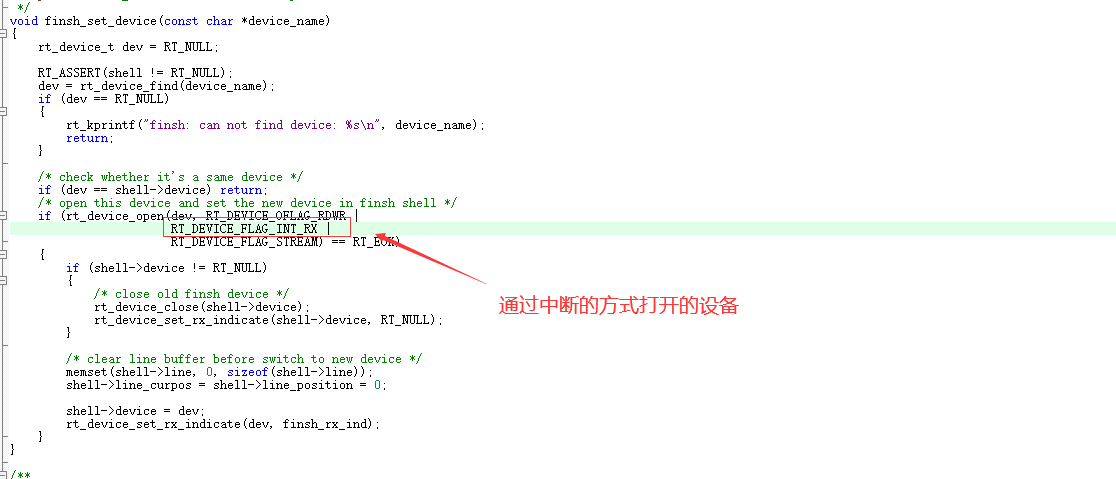
#define RT_DEVICE_FLAG_RDONLY 0x001 /* 唯讀 */ #define RT_DEVICE_FLAG_WRONLY 0x002 /* 只寫 */ #define RT_DEVICE_FLAG_RDWR 0x003 /* 讀寫 */ #define RT_DEVICE_FLAG_REMOVABLE 0x004 /* 可移除 */ #define RT_DEVICE_FLAG_STANDALONE 0x008 /* 獨立 */ #define RT_DEVICE_FLAG_SUSPENDED 0x020 /* 掛起 */ #define RT_DEVICE_FLAG_STREAM 0x040 /* 流模式 */ #define RT_DEVICE_FLAG_INT_RX 0x100 /* 中斷接收 */ #define RT_DEVICE_FLAG_DMA_RX 0x200 /* DMA 接收 */ #define RT_DEVICE_FLAG_INT_TX 0x400 /* 中斷傳送 */ #define RT_DEVICE_FLAG_DMA_TX 0x800 /* DMA 傳送 */認真思考的小夥伴就會存在一個疑問,為啥將資料接收註冊為 流模式 會導致裝置為空了,可以猜測在某處導致了裝置丟失,我們仔細找一下程式碼就會發現在shell.c檔案中,通過了中斷的方式開啟了裝置,如下圖所示:
現在原因找到了,那麼解決方式有兩種,如下所示:
解決辦法
-
將註冊裝置時,改為中斷接收的方式註冊裝置
-
將shell.c檔案中的發開方式改為流模式即可,只需要將 RT_DEVICE_FLAG_INT_RX 遮蔽,如下所示:
void finsh_set_device(const char *device_name) { rt_device_t dev = RT_NULL; RT_ASSERT(shell != RT_NULL); dev = rt_device_find(device_name); if (dev == RT_NULL) { rt_kprintf("finsh: can not find device: %s\n", device_name); return; } /* check whether it's a same device */ if (dev == shell->device) return; /* open this device and set the new device in finsh shell */ if (rt_device_open(dev, RT_DEVICE_OFLAG_RDWR | // RT_DEVICE_FLAG_INT_RX | RT_DEVICE_FLAG_STREAM) == RT_EOK) { if (shell->device != RT_NULL) { /* close old finsh device */ rt_device_close(shell->device); rt_device_set_rx_indicate(shell->device, RT_NULL); } /* clear line buffer before switch to new device */ memset(shell->line, 0, sizeof(shell->line)); shell->line_curpos = shell->line_position = 0; shell->device = dev; rt_device_set_rx_indicate(dev, finsh_rx_ind); } }** 注意:** 改為流模式後,會發現一個奇怪的現象,就是當你使用偵錯模式時,可以正常接收指令,但是正常執行時,就無任何響應,遇到這樣的現象不要慌,接著往下看。
三、FinSH 卡死問題
-
現象:FinSH執行緒卡死,明顯的發現就是,使用偵錯模式時,可以正常接收指令,但是正常執行時,就無任何響應。
-
原因:深入分析後,會在 shell.c 檔案中的 finsh_getchar 函數中看到號誌的使用,如下圖所示:

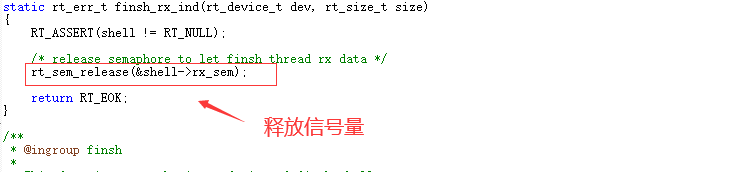
現在原因找到了,那麼我們只需要在適當的時候釋放號誌即可,那我們在找找看看有麼有訊號釋放的函數,接下來我們會發現在 shell.c 檔案中 finsh_rx_ind 函數就是釋放號誌的,如圖所示:
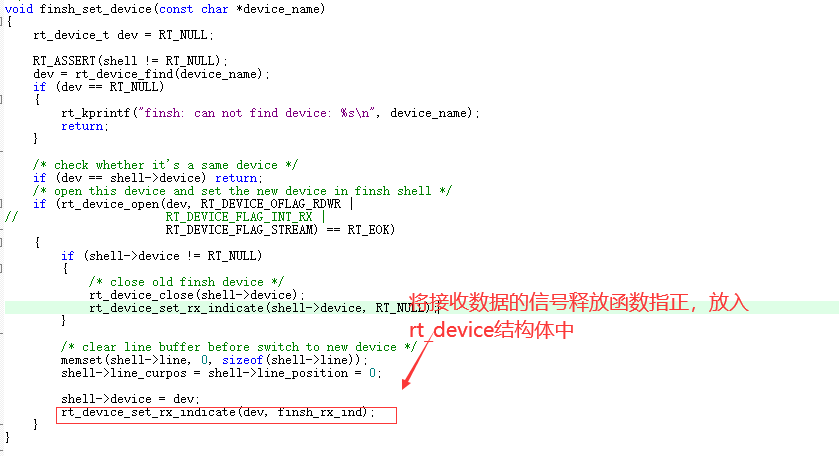
那麼新的問題又來了,怎麼呼叫這個函數了,因為在shell.h檔案中也沒有這個函數的定義, 不要怕我們接著找,最後在shell.c 檔案中的 finsh_set_device 函數中,會將釋放號誌的函數指標放入 rt_device 結構體中,如下圖所示:
那麼問題就變得簡單了,解決辦法如下
-
解決辦法:我們已經知道怎麼釋放號誌了,所以只需要在 資料接收函數(stm32_getc)中,完成資料接收後,釋放號誌即可,如下所示:
/** * 接收一個字元資料 */ static int stm32_getc(struct rt_serial_device *serial) { int ch; struct stm32_uart *uart; RT_ASSERT(serial != RT_NULL); uart = rt_container_of(serial, struct stm32_uart, serial); ch = -1; if (USART_GetFlagStatus(uart->handle.Instance, USART_FLAG_RXNE) != RESET) { #if defined(SOC_SERIES_STM32L4) || defined(SOC_SERIES_STM32F7) || defined(SOC_SERIES_STM32F0) \ || defined(SOC_SERIES_STM32L0) || defined(SOC_SERIES_STM32G0) || defined(SOC_SERIES_STM32H7) \ || defined(SOC_SERIES_STM32G4) ch = uart->handle.Instance->RDR & 0xff; #else // ch = (uint16_t)uart->handle.Instance->DR & (uint16_t)0x00ff; ch = (char)USART_ReceiveData(uart->handle.Instance); #endif } /* 呼叫裝置接收資料回撥,釋放號誌 */ uart->serial.parent.rx_indicate(&serial->parent, 0); return ch; }
四、測試
解決完問題後,在控制檯輸入回車有相應的迴應就沒問題,如下圖所示: