[自制作業系統] 第12回 實現中斷程式碼
目錄
一、前景回顧
二、實現中斷框架
三、程式碼實現
四、中斷的壓棧和出棧過程分析
五、執行測試
前面我們已經講解了中斷的基本知識,接下來要開始進行程式碼的實操。程式碼主要有兩塊,其中一塊是關於可程式化中斷控制器8259A的程式碼,另一塊主要是整個中斷的程式碼。
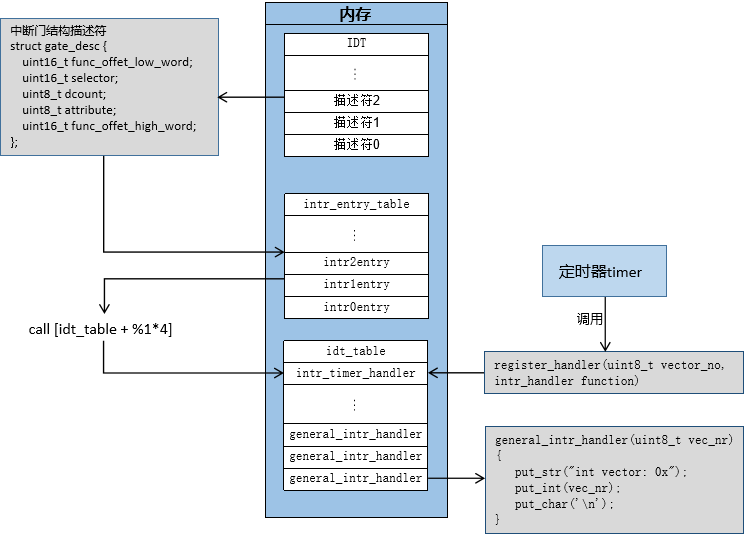
IDT:中斷描述符表。
gate_desc:中斷描述符。
intr_entry_table:中斷處理入口函數表。該陣列儲存了所有中斷處理入口函數的地址,其核心是通過call [idt_table + %1*4] 的方式在idt_table表中呼叫中斷處理常式。
idt_table:中斷處理常式表,該陣列儲存的才是真正的中斷處理常式地址。
general_intr_handler:通用中斷處理常式。
register_handler:中斷註冊函數,外設(例如定時器timer)通過呼叫該函數來註冊自定義中斷處理常式(如intr_timer_handler)。
接下來我們照著上面的流程圖來詳細地講解整個中斷框架的組成以及中斷相關程式碼的實現。
首先我們看到IDT,也就是中斷描述符表,中斷描述符表是有多箇中斷描述符組成的,如下圖所示:
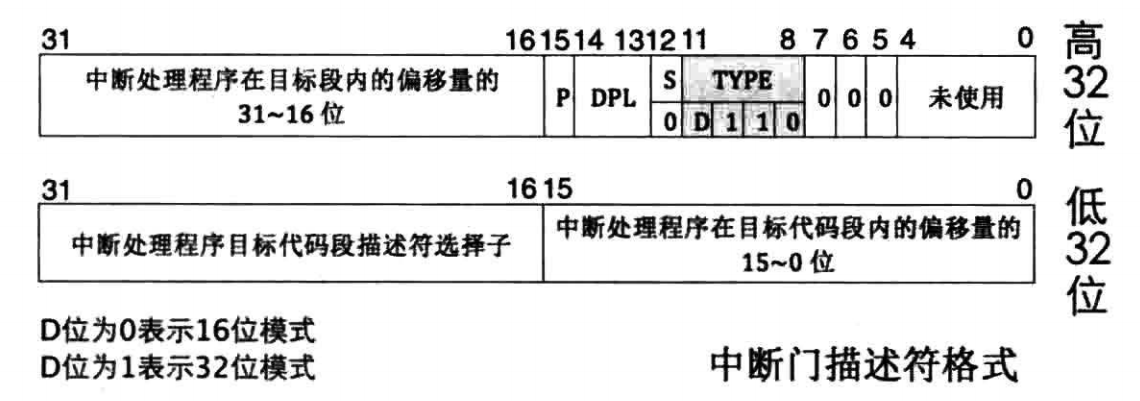
所以我們通過結構體來構造這麼一個描述符:
1 /*中斷門描述符結構體*/ 2 struct gate_desc { 3 uint16_t func_offet_low_word; 4 uint16_t selector; 5 uint8_t dcount; //此項為雙字計數位段,是門描述符中的第4位元組 6 uint8_t attribute; 7 uint16_t func_offet_high_word; 8 };
中斷向量號通過在IDT中索引得到對應的中斷描述符,解析後便可以得到中斷處理常式的所在地址,隨後CPU便跳轉執行該函數。按理說跳轉執行中斷函數就好了,怎麼又多了一個intr_entry_table表出來?其實我們需要知道,CPU跳轉執行中時,因為我們還會返回,所以需要進行上下文保護,也就是保護當前的暫存器環境,只有保護好了環境資源才可以跳轉過去執行函數。又因為使用組合來編寫中斷函數比較繁瑣,可讀性差,所以我們在C語言環境下進行中斷函數編寫。總的來說,當CPU拿到中斷向量號後,在IDT中索引得到中斷處理常式地址(intr%1entry)(這個其實並不是真正的中斷處理常式地址,嚴格意義上來說應該是進入中斷處理常式的函數,在這個函數中進行上下文環境保護,隨後才跳轉執行真正的中斷處理常式),來看intr%1entry的構成:
intr%1entry: %2 push ds push es push fs push gs pushad ;8259A相關設定 mov al, 0x20 out 0xa0, al out 0x20, al push %1 ;將中斷號壓棧 call [idt_table + %1*4] ;呼叫中斷處理常式 jmp intr_exit ;退出中斷
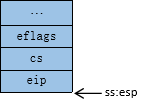
如上所示,進入該函數後,這個%2是什麼呢?它是一個宏定義,本質上就是起了一個佔位作用。因為CPU在進入到中斷後會向棧中壓入部分暫存器環境,這是CPU自動完成的,不需要我們手動編寫,儲存的暫存器名稱及順序是:
1、如果發生特權級轉移,此時要把低特權級的棧段選擇子ss及棧指標esp儲存到棧中。
2、壓入標誌暫存器eflags。
3、壓入返回地址cs和eip。
4、如果此中斷沒有相應的錯誤碼,至此,CPU把暫存器壓棧的工作就完成了,如果有錯誤碼,CPU在壓入eip之後還會壓入錯誤碼。如下圖所示:
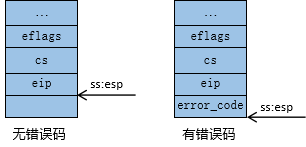
所以為了保證棧頂指標的一致,在有錯誤碼壓入時,%2其實就是一個nop指令,撒也不做。如果沒有錯誤碼壓入,那麼%2就是push 0的指令,這樣就能保證棧頂指標的一致性(詳細程式碼請看後續程式碼實現)。這裡我就說這麼多,詳情請檢視原書《作業系統真象還原》p320~323頁。
隨後通過push和pushad指令將當前環境下的8個通用暫存器和4個段暫存器給儲存起來,隨後是8259A相關設定,這裡就多說了。然後是將中斷號壓棧。最後通過call指令呼叫中斷處理常式(這次真是中斷處理常式了,如假包換),中斷處理常式我們是使用C語言來編寫的,因為這樣便於閱讀和修改。我們將所有的中斷處理常式存放在idt_table中,為方便查詢,並且後面註冊中斷處理常式時,只需要往idt_table中插入我們編寫的中斷處理常式就好了。可以看到idt_table中預設的中斷處理常式都是general_intr_handler,我們通過register_handler函數給定時器註冊了名為intr_timer_handler的中斷處理常式。最後中斷處理常式執行完畢後通過jmp intr_exit函數就完成環境恢復,且回到中斷髮生時的地址處繼續執行程式碼。
因為涉及到對於可程式化中斷控制器8259A的埠的讀寫,所以我們在project/lib/kernel目錄下新建一個名為io.h的檔案,在該檔案中定義對埠的讀寫函數。


1 /************** 機器模式 ***************
2 b -- 輸出暫存器QImode名稱,即暫存器中的最低8位元:[a-d]l。
3 w -- 輸出暫存器HImode名稱,即暫存器中2個位元組的部分,如[a-d]x。
4
5 HImode
6 「Half-Integer」模式,表示一個兩位元組的整數。
7 QImode
8 「Quarter-Integer」模式,表示一個一位元組的整數。
9 *******************************************/
10
11 #ifndef __LIB_IO_H
12 #define __LIB_IO_H
13 #include "stdint.h"
14
15 /* 向埠port寫入一個位元組*/
16 static inline void outb(uint16_t port, uint8_t data) {
17 /*********************************************************
18 a表示用暫存器al或ax或eax,對埠指定N表示0~255, d表示用dx儲存埠號,
19 %b0表示對應al,%w1表示對應dx */
20 asm volatile ( "outb %b0, %w1" : : "a" (data), "Nd" (port));
21 /******************************************************/
22 }
23
24 /* 將addr處起始的word_cnt個字寫入埠port */
25 static inline void outsw(uint16_t port, const void* addr, uint32_t word_cnt) {
26 /*********************************************************
27 +表示此限制即做輸入又做輸出.
28 outsw是把ds:esi處的16位元的內容寫入port埠, 我們在設定段描述符時,
29 已經將ds,es,ss段的選擇子都設定為相同的值了,此時不用擔心資料錯亂。*/
30 asm volatile ("cld; rep outsw" : "+S" (addr), "+c" (word_cnt) : "d" (port));
31 /******************************************************/
32 }
33
34 /* 將從埠port讀入的一個位元組返回 */
35 static inline uint8_t inb(uint16_t port) {
36 uint8_t data;
37 asm volatile ("inb %w1, %b0" : "=a" (data) : "Nd" (port));
38 return data;
39 }
40
41 /* 將從埠port讀入的word_cnt個字寫入addr */
42 static inline void insw(uint16_t port, void* addr, uint32_t word_cnt) {
43 /******************************************************
44 insw是將從埠port處讀入的16位元內容寫入es:edi指向的記憶體,
45 我們在設定段描述符時, 已經將ds,es,ss段的選擇子都設定為相同的值了,
46 此時不用擔心資料錯亂。*/
47 asm volatile ("cld; rep insw" : "+D" (addr), "+c" (word_cnt) : "d" (port) : "memory");
48 /******************************************************/
49 }
50
51 #endif
在project/kernel目錄下新建名為interrupt.c、interrupt.h、kernel.S、global.h檔案。
1 #include "interrupt.h"
2 #include "stdint.h"
3 #include "global.h"
4 #include "io.h"
5 #include "print.h"
6
7 #define IDT_DESC_CNT 0x81 //目前支援的中斷數
8
9 #define PIC_M_CTRL 0x20 //主片的控制埠是0x20
10 #define PIC_M_DATA 0x21 //主片的資料埠是0x21
11 #define PIC_S_CTRL 0xa0 //從片的控制埠是0xa0
12 #define PIC_S_DATA 0xa1 //從片的資料埠是0xa1
13
14
15 /*中斷門描述符結構體*/
16 struct gate_desc {
17 uint16_t func_offet_low_word;
18 uint16_t selector;
19 uint8_t dcount; //此項為雙字計數位段,是門描述符中的第4位元組
20 uint8_t attribute;
21 uint16_t func_offet_high_word;
22 };
23
24 /*定義IDT表*/
25 static struct gate_desc idt[IDT_DESC_CNT];
26 extern intr_handler intr_entry_table[IDT_DESC_CNT];
27
28 char *intr_name[IDT_DESC_CNT]; //用於儲存異常的名字
29 intr_handler idt_table[IDT_DESC_CNT]; //定義中斷處理程式陣列
30
31 /*通用的中斷處理常式,一般用在異常出現時的處理*/
32 static void general_intr_handler(uint8_t vec_nr)
33 {
34 if (vec_nr == 0x27 || vec_nr == 0x2f) {
35 return ;
36 }
37
38 /*將遊標置為0,從螢幕左上角清出一片列印異常資訊的區域,方便閱讀*/
39 set_cursor(0);
40 int cursor_pos = 0;
41 while (cursor_pos < 320) {
42 put_char(' ');
43 cursor_pos++;
44 }
45
46 set_cursor(0);
47 put_str("!!!!!!!!!!!exception message begin!!!!!!!!!");
48 set_cursor(88);
49 put_str(intr_name[vec_nr]);
50
51 //如果為pagefault,將缺失的地址列印出來並且懸停
52 if (vec_nr == 14) {
53 int page_fault_vaddr = 0;
54 asm volatile ("movl %%cr2, %0": "=r" (page_fault_vaddr)); //cr2存放造成pagefault的虛擬地址
55 put_str("\npage fault addr is: ");put_int(page_fault_vaddr);
56 }
57 put_str("!!!!!!!!!!!exception message end!!!!!!!!!!");
58 //能進入中斷處理程式就表示已經處於關中斷的情況下,不會出現程序排程的情況,因此下面的死迴圈可以一直執行
59 while (1);
60 }
61
62 /*完成一般中斷處理常式註冊及異常名稱註冊*/
63 static void exception_init(void)
64 {
65 int i;
66 for (i = 0; i < IDT_DESC_CNT; i++) {
67 idt_table[i] = general_intr_handler;
68 intr_name[i] = "unknow";
69 }
70 intr_name[0] = "#DE Divide Error";
71 intr_name[1] = "#DB Debug Exception";
72 intr_name[2] = "NMI Interrupt";
73 intr_name[3] = "#BP Breakpoint Exception";
74 intr_name[4] = "#OF Overflow Exception";
75 intr_name[5] = "#BR BOUND Range Exceeded Exception";
76 intr_name[6] = "#UD Invalid Opcode Exception";
77 intr_name[7] = "#NM Device Not Available Exception";
78 intr_name[8] = "#DF Double Fault Exception";
79 intr_name[9] = "Coprocessor Segment Overrun";
80 intr_name[10] = "#TS Invalid TSS Exception";
81 intr_name[11] = "#NP Segment Not Present";
82 intr_name[12] = "#SS Stack Fault Exception";
83 intr_name[13] = "#GP General Protection Exception";
84 intr_name[14] = "#PF Page-Fault Exception";
85 // intr_name[15] 第15項是intel保留項,未使用
86 intr_name[16] = "#MF x87 FPU Floating-Point Error";
87 intr_name[17] = "#AC Alignment Check Exception";
88 intr_name[18] = "#MC Machine-Check Exception";
89 intr_name[19] = "#XF SIMD Floating-Point Exception";
90 }
91
92 /* 初始化可程式化中斷控制器8259A */
93 static void pic_init(void) {
94 /* 初始化主片 */
95 outb(PIC_M_CTRL, 0x11); // ICW1: 邊沿觸發,級聯8259, 需要ICW4.
96 outb(PIC_M_DATA, 0x20); // ICW2: 起始中斷向量號為0x20,也就是IR[0-7] 為 0x20 ~ 0x27.
97 outb(PIC_M_DATA, 0x04); // ICW3: IR2接從片.
98 outb(PIC_M_DATA, 0x01); // ICW4: 8086模式, 正常EOI
99
100 /* 初始化從片 */
101 outb(PIC_S_CTRL, 0x11); // ICW1: 邊沿觸發,級聯8259, 需要ICW4.
102 outb(PIC_S_DATA, 0x28); // ICW2: 起始中斷向量號為0x28,也就是IR[8-15] 為 0x28 ~ 0x2F.
103 outb(PIC_S_DATA, 0x02); // ICW3: 設定從片連線到主片的IR2引腳
104 outb(PIC_S_DATA, 0x01); // ICW4: 8086模式, 正常EOI
105
106
107 /*開啟時鐘中斷*/
108 outb(PIC_M_DATA, 0xfe);
109 outb(PIC_S_DATA, 0xff);
110
111 put_str("pic_init done\n");
112 }
113
114
115 /*建立中斷門描述符*/
116 static void make_idt_desc(struct gate_desc *p_gdesc, uint8_t attr, intr_handler function)
117 {
118 p_gdesc->func_offet_low_word = (uint32_t)function & 0x0000FFFF;
119 p_gdesc->selector = SELECTOR_K_CODE;
120 p_gdesc->dcount = 0;
121 p_gdesc->attribute = attr;
122 p_gdesc->func_offet_high_word = ((uint32_t)function & 0xFFFF0000) >> 16;
123 }
124
125 /*初始化中斷描述符表*/
126 static void idt_desc_init(void)
127 {
128 int i = 0;
129 for (i = 0; i <IDT_DESC_CNT; i++) {
130 make_idt_desc(&idt[i], IDT_DESC_ATTR_DPL0, intr_entry_table[i]);
131 }
132
133 put_str("ide_desc_init done\n");
134 }
135
136 /*完成中斷有關的所有初始化工作*/
137 void idt_init(void)
138 {
139 put_str("idt_init start\n");
140 idt_desc_init();
141 exception_init();
142 pic_init();
143
144 /*載入idt*/
145 uint64_t idt_operand = (sizeof(idt) - 1) | ((uint64_t)(uint32_t)idt << 16);
146 asm volatile("lidt %0" : : "m"(idt_operand));
147 put_str("idt_init done\n");
148 }
149
150
151 /*在中斷處理程式陣列第vector_no個元素中註冊安裝中斷處理程式*/
152 void register_handler(uint8_t vector_no, intr_handler function)
153 {
154 idt_table[vector_no] = function;
155 }
1 #ifndef __KERNEL_INTERRUPT_H
2 #define __KERNEL_INTERRUPT_H
3 #include "stdint.h"
4
5 typedef void* intr_handler;
6 void register_handler(uint8_t vector_no, intr_handler function);
7 void idt_init(void);
8 #endif
1 [bits 32]
2 %define ERROR_CODE nop
3 %define ZERO push 0
4
5 extern put_str ;宣告外部函數
6 extern idt_table ;宣告外部中斷函數陣列
7
8 section .data
9 global intr_entry_table
10 intr_entry_table:
11
12 %macro VECTOR 2
13 section .text
14 intr%1entry:
15 %2
16 push ds
17 push es
18 push fs
19 push gs
20 pushad
21
22 ;8259A相關設定
23 mov al, 0x20
24 out 0xa0, al
25 out 0x20, al
26
27 push %1 ;將中斷號壓棧
28 call [idt_table + %1*4] ;呼叫中斷處理常式
29 jmp intr_exit ;退出中斷
30
31 section .data
32 dd intr%1entry
33 %endmacro
34
35 section .text
36 global intr_exit
37 intr_exit:
38 add esp, 4
39 popad
40 pop gs
41 pop fs
42 pop es
43 pop ds
44 add esp, 4
45 iretd
46
47 VECTOR 0x00, ZERO
48 VECTOR 0x01, ZERO
49 VECTOR 0x02, ZERO
50 VECTOR 0x03, ZERO
51 VECTOR 0x04, ZERO
52 VECTOR 0x05, ZERO
53 VECTOR 0x06, ZERO
54 VECTOR 0x07, ZERO
55 VECTOR 0x08, ERROR_CODE
56 VECTOR 0x09, ZERO
57 VECTOR 0x0A, ERROR_CODE
58 VECTOR 0x0B, ERROR_CODE
59 VECTOR 0x0C, ERROR_CODE
60 VECTOR 0x0D, ERROR_CODE
61 VECTOR 0x0E, ERROR_CODE
62 VECTOR 0x0F, ZERO
63 VECTOR 0x10, ZERO
64 VECTOR 0x11, ERROR_CODE
65 VECTOR 0x12, ZERO
66 VECTOR 0x13, ZERO
67 VECTOR 0x14, ZERO
68 VECTOR 0x15, ZERO
69 VECTOR 0x16, ZERO
70 VECTOR 0x17, ZERO
71 VECTOR 0x18, ZERO
72 VECTOR 0x19, ZERO
73 VECTOR 0x1A, ZERO
74 VECTOR 0x1B, ZERO
75 VECTOR 0x1C, ZERO
76 VECTOR 0x1D, ZERO
77 VECTOR 0x1E, ERROR_CODE
78 VECTOR 0x1F, ZERO
79 VECTOR 0x20, ZERO ;時鐘中斷對應的入口
80 VECTOR 0x21, ZERO ;鍵盤中斷
81 VECTOR 0x22, ZERO ;級聯
82 VECTOR 0x23, ZERO ;串列埠2
83 VECTOR 0x24, ZERO ;串列埠1
84 VECTOR 0x25, ZERO ;並口2
85 VECTOR 0x26, ZERO ;軟碟
86 VECTOR 0x27, ZERO ;並口1
87 VECTOR 0x28, ZERO ;實時時鐘
88 VECTOR 0x29, ZERO ;重定向
89 VECTOR 0x2A, ZERO ;保留
90 VECTOR 0x2B, ZERO ;保留
91 VECTOR 0x2C, ZERO ;ps/2 滑鼠
92 VECTOR 0x2D, ZERO ;fpu 浮點單元異常
93 VECTOR 0x2E, ZERO ;硬碟
94 VECTOR 0x2F, ZERO ;保留
95
96
97
98
99
1 #ifndef __KERNEL_GLOBAL_H 2 #define __KERNEL_GLOBAL_H 3 #include "stdint.h" 4 5 /************ GDT描述符屬性**************/ 6 #define RPL0 0 7 #define RPL1 1 8 #define RPL2 2 9 #define RPL3 3 10 11 #define TI_GDT 0 12 #define TI_LDT 1 13 14 #define DESC_G_4K 1 15 #define DESC_D_32 1 16 #define DESC_L 0 17 #define DESC_AVL 0 18 #define DESC_P 1 19 #define DESC_DPL_0 0 20 #define DESC_DPL_1 1 21 #define DESC_DPL_2 2 22 #define DESC_DPL_3 3 23 24 #define DESC_S_CODE 1 25 #define DESC_S_DATA DESC_S_CODE 26 #define DESC_S_SYS 0 27 #define DESC_TYPE_CODE 8 28 29 #define DESC_TYPE_DATA 2 30 #define DESC_TYPE_TSS 9 31 32 #define SELECTOR_K_CODE ((1 << 3) + (TI_GDT << 2) + RPL0) 33 #define SELECTOR_K_DATA ((2 << 3) + (TI_GDT << 2) + RPL0) 34 #define SELECTOR_K_STACK SELECTOR_K_DATA 35 #define SELECTOR_K_GS ((3 << 3) + (TI_GDT << 2) + RPL0) 36 37 /*使用者程序的段描述符*/ 38 #define SELECTOR_U_CODE ((5 << 3) + (TI_GDT << 2) + RPL3) 39 #define SELECTOR_U_DATA ((6 << 3) + (TI_GDT << 2) + RPL3) 40 #define SELECTOR_U_STACK SELECTOR_U_DATA 41 42 43 #define GDT_ATTR_HIGH ((DESC_G_4K << 7) + (DESC_D_32 << 6) + (DESC_L << 5) + (DESC_AVL << 4)) 44 #define GDT_CODE_ATTR_LOW_DPL3 ((DESC_P << 7) + (DESC_DPL_3 << 5) + (DESC_S_CODE << 4) + DESC_TYPE_CODE) 45 #define GDT_DATA_ATTR_LOW_DPL3 ((DESC_P << 7) + (DESC_DPL_3 << 5) + (DESC_S_DATA << 4) + DESC_TYPE_DATA) 46 47 48 49 50 51 /******************** IDT描述符屬性**********************/ 52 #define IDT_DESC_P 1 //1表示在記憶體中 53 #define IDT_DESC_DPL0 0 54 #define IDT_DESC_DPL3 3 55 #define IDT_DESC_32_TYPE 0xE 56 #define IDT_DESC_16_TYPE 0x6 57 58 #define IDT_DESC_ATTR_DPL0 \ 59 ((IDT_DESC_P << 7) + (IDT_DESC_DPL0 << 5) + IDT_DESC_32_TYPE) 60 #define IDT_DESC_ATTR_DPL3 \ 61 ((IDT_DESC_P << 7) + (IDT_DESC_DPL3 << 5) + IDT_DESC_32_TYPE) 62 63 64 65 /******************** TSS描述符屬性**********************/ 66 #define TSS_DESC_D 0 67 #define TSS_ATTR_HIGH ((DESC_G_4K << 7) + (TSS_DESC_D << 6) + (DESC_L << 5) + (DESC_AVL << 4) + 0x0) 68 #define TSS_ATTR_LOW ((DESC_P << 7) + (DESC_DPL_0 << 5) + (DESC_S_SYS << 4) + DESC_TYPE_TSS) 69 70 #define SELECTOR_TSS ((4 << 3) + (TI_GDT << 2) + RPL0) 71 72 73 /*定義GDT中描述符的結構*/ 74 struct gdt_desc { 75 uint16_t limit_low_word; 76 uint16_t base_low_word; 77 uint8_t base_mid_byte; 78 uint8_t attr_low_byte; 79 uint8_t limit_high_attr_high; 80 uint8_t base_high_byte; 81 }; 82 83 84 85 #define EFLAGS_MBS (1 << 1) //此項必須設定 86 #define EFLAGS_IF_1 (1 << 9) //開中斷 87 #define EFLAGS_IF_0 0 //關中斷 88 #define EFLAGS_IOPL_3 (3 << 12) 89 90 #define EFLAGS_IOPL_0 (0 << 12) 91 92 #define NULL ((void *)0) 93 #define DIV_ROUND_UP(X, STEP) ((X + STEP - 1) / (STEP)) 94 95 #define PG_SIZE 4096 96 97 #endif
此外還需要在project/kernel目錄下新建timer.c和timer.h檔案,因為我們本回測試會用上定時器中斷,所以關於定時器8253的初始化以及中斷函數註冊就在這兩個檔案中實現了,定時器的介紹就請參閱原書《作業系統真象還原》P346~356頁。
1 #include "timer.h"
2 #include "io.h"
3 #include "print.h"
4 #include "interrupt.h"
5
6 #define IRQ0_FREQUENCY 100
7 #define INPUT_FREQUENCY 1193180
8 #define COUNTER0_VALUE INPUT_FREQUENCY / IRQ0_FREQUENCY
9 #define COUNTER0_PORT 0x40
10 #define COUNTER0_NO 0
11 #define COUNTER_MODE 2
12 #define READ_WRITE_LATCH 3
13 #define PIT_COUNTROL_PORT 0x43
14
15
16 static void intr_timer_handler(uint8_t vec_nr) {
17 put_str("int vector: 0x");
18 put_int(vec_nr);
19 put_char('\n');
20 }
21
22 static void frequency_set(uint8_t counter_port ,uint8_t counter_no,uint8_t rwl,uint8_t counter_mode,uint16_t counter_value)
23 {
24 outb(PIT_COUNTROL_PORT, (uint8_t) (counter_no << 6 | rwl << 4 | counter_mode << 1));
25 outb(counter_port, (uint8_t)counter_value);
26 outb(counter_port, (uint8_t)counter_value >> 8);
27 }
28
29 void timer_init(void)
30 {
31 put_str("timer_init start!\n");
32 frequency_set(COUNTER0_PORT, COUNTER0_NO, READ_WRITE_LATCH, COUNTER_MODE, COUNTER0_VALUE);
33 register_handler(0x20, intr_timer_handler);
34 put_str("timer_init done!\n");
35 }
1 #ifndef __KERNEL_TIMER_H
2 #define __KERNEL_TIMER_H
3 #include "stdint.h"
4
5 void timer_init(void);
6 static void intr_timer_handler(uint8_t vec_nr);
7
8 #endif
最後,我們在project/kernel目錄下新建init.c和init.h檔案,init.c中有一個init.all函數,該函數用來包含所有初始化函數,比如到目前為止的中斷初始化以及定時器初始化,後面還會有更多的初始化函數加入進來。
1 #include "init.h"
2 #include "print.h"
3 #include "interrupt.h"
4 #include "timer.h"
5
6 void init_all(void)
7 {
8 put_str("init_all\n");
9 idt_init(); //初始化中斷
10 timer_init(); //初始化定時器
11 }
1 #ifndef __KERNEL_INIT_H
2 #define __KERNEL_INIT_H
3 void init_all(void);
4 #endif
下面我們通過一個例子來分析一下整個中斷的壓棧和出棧過程,從而助於我們更好地瞭解整個中斷過程。
這天CPU正在埋頭苦幹。突然,外設定時器計數溢位了,我們的中斷控制器8259A接收到這一訊息,馬上火急火燎地跑來通知CPU(給予CPU當前發生中斷的中斷號:0x20),CPU知道這一訊息,腦子突然一轉,就這一瞬間的功夫,就做了兩件事:1、判斷是否有特權級轉移:當前被中斷的程序,也就是CPU正在做的事,處於0特權級,而中斷處理程式也是0特權級,所以沒有發生特權級轉移。(如果發生了特權級轉移,此時需要把低特權級的棧段選擇子SS和棧指標esp儲存在棧中)2、在當前棧中壓入標誌暫存器eflags、壓入返回地址cs和eip(先壓入cs,後壓入eip,這個地址就是CPU正在執行的任務的地址,等CPU執行完中斷後需要繼續回來執行任務,所以需要把地址記下來,免得CPU找不到回來的路),如果對應的中斷有相應的錯誤碼,還會將錯誤碼壓入棧中,否則就結束(關於中斷錯誤碼,忘記的同學可以回看上一回)。
隨後,根據中斷號,CPU在IDT表索引找到了對應的中斷描述符,由該描述符尋找到進入中斷處理常式的函數地址,繼而跳轉過去,函數內容如下:
1 intr%1entry: 2 %2 3 push ds 4 push es 5 push fs 6 push gs 7 pushad 8 9 ;8259A相關設定 10 mov al, 0x20 11 out 0xa0, al 12 out 0x20, al 13 14 push %1 ;將中斷號壓棧 15 call [idt_table + %1*4] ;呼叫中斷處理常式 16 jmp intr_exit ;退出中斷
在該函數中,首先,如果前面已經壓入了錯誤碼,那麼%2的作用就是執行nop,延時,對棧和暫存器都沒有影響。如果沒有壓入錯誤碼,就執行push 0的指令,這樣做的目的只是為了相容兩種不同的壓棧方式。隨後便是將4個段暫存器ds、es、fs、gs和8個32位元的通用暫存器壓棧,保護現場。最後通過push %1將中斷號壓入棧,通過呼叫call[idt_table + %1*4]進入真正的中斷處理常式,這裡又會壓入當前函數的返回地址cs和eip。所以此時的棧的情況如下左圖所示。
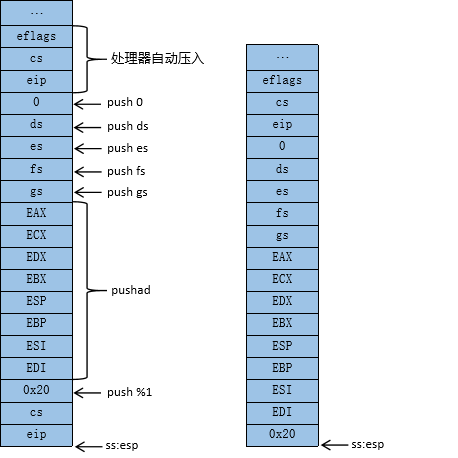
中斷處理常式就是我們定義的intr_timer_handler函數,我們在該函數中列印一次中斷號0x20,隨後通過棧內的地址返回,此時來到了jmp intr_exit命令,我們來看看intr_exit指的是什麼,以及此時棧的情況,如上右圖。
1 static void intr_timer_handler(uint8_t vec_nr) { 2 put_str("int vector: 0x"); 3 put_int(vec_nr); 4 put_char('\n'); 5 }
1 intr_exit: 2 add esp, 4 3 popad 4 pop gs 5 pop fs 6 pop es 7 pop ds 8 add esp, 4 9 iretd
首先通過add esp,4將棧頂指標加4,也就是跳過0x20這個地方,0x20是我們前面手動壓入的中斷號。隨後通過popad將8個32位元通用暫存器彈出,再通過pop指令將gs、fs、es和彈出,add esp,4跳過棧中0的位置,這個0也是我們前面手動壓入的。此時棧的情況如下:
這裡還剩下iretd指令沒有執行了,這個指令的作用就是將eip、cs和eflags彈出,前提是當前棧頂為eip,也就是我們必須保證棧頂是eip,才能使該指令執行正確。那麼此時我們棧頂的確是eip。該指令執行完畢後,通過前面壓入的cs和eip,也就是函數返回地址,CPU又回去繼續執行前面被中斷所打斷的任務了。講到這裡我們就將整個中斷壓棧和出棧的過程講解完畢了。
囉嗦了這麼多,總算結束了。這裡還沒有涉及到有特權級轉換的情況,其實區別不會太大,等到了程序的章節再來補充。
更新一下我們的main.c檔案:
1 #include "print.h"
2 #include "init.h"
3 #include "timer.h"
4 #include "interrupt.h"
5
6 void main(void)
7 {
8 put_str("I am Kernel\n");
9 init_all();
10 asm volatile("sti");
11 while (1);
12 }
接下來通過這一長串的操作步驟將程式編譯連結下載到磁碟中去:
gcc -m32 -I project/kernel/ -I project/lib/kernel/ -c -fno-builtin project/kernel/timer.c -o project/kernel/timer.o gcc -m32 -I project/kernel/ -I project/lib/kernel/ -c -fno-builtin project/kernel/main.c -o project/kernel/main.o gcc -m32 -I project/kernel/ -I project/lib/kernel/ -c -fno-builtin -o project/kernel/init.o project/kernel/init.c gcc -m32 -I ./project/kernel/ -I ./project/lib/kernel/ -c -fno-builtin -o ./project/kernel/interrupt.o ./project/kernel/interrupt.c nasm -f elf -o ./project/lib/kernel/print.o ./project/lib/kernel/print.S nasm -f elf -o ./project/kernel/kernel.o ./project/kernel/kernel.S ld -m elf_i386 -Ttext 0xc0001500 -e main -o build/kernel.bin project/kernel/main.o project/kernel/init.o project/kernel/interrupt.o project/lib/kernel/print.o project/kernel/kernel.o project/kernel/timer.o dd if=./build/kernel.bin of=./hd60M.img bs=512 count=200 seek=9 conv=notrunc
啟動bochs,可以看到int vector:0x20的出現,這裡是因為我們初始化定時器後,讓定時器在每次定時溢位後觸發中斷(定時器的中斷號為0x20),在定時器的中斷處理常式中,我們列印定時器的中斷號。這樣也就證明了我們的程式沒有問題。

好了,本回到此結束了,可以看到程式碼一多起來後,光是編譯下載都挺麻煩的,所以接下來我們需要改進一下。預知後事如何,請看下回分解。