PX4設定過程與踩坑
2022-05-31 18:00:31
0.前言
由於需要在GitHub下載程式碼,而國記憶體取受限,可能會出現一些問題,這裡建議使用github國內映象,參看:GitHub國內映象網站,當然下面會給出具體解決方案。
1.步驟
1.1下載原始碼:git clone https://github.com/PX4/PX4-Autopilot.git
注意:
若該步驟出錯,使用映象,也就是執行:git clone https://hub.fastgit.xyz/PX4/PX4-Autopilot.git
或者使用gitee映象:git clone https://gitee.com/robin_shaun/PX4_Firmware(注意使用這個方法時的原始碼檔名是PX4_Firmware)
1.2 切換到原始碼資料夾:cd PX4-Autopilot
1.3 更新工程子模組git submodule update --init --recursive
注意:
若該步驟出錯,歸根到底還是因為github存取不穩定。解決方案如下:
(方案的總體原則就是改變原始碼裡面各個.gitmodules檔案裡的下載地址,需要注意的是原始碼位置,我這裡是將原始碼放在主資料夾下,也就是 ~/PX4_Autopilot)
(1)原始碼主資料夾下
cd ~/PX4_Autopilotgedit .gitmodules
(注意:這裡主要是為了修改檔案,我用的是gedit編輯器,也可以用vim, nano,vs code之類的,後面相同)
將 .gitmodules 中的內容更換為:
[submodule "mavlink/include/mavlink/v2.0"]
path = mavlink/include/mavlink/v2.0
url = https://gitee.com/robin_shaun/c_library_v2.git
branch = master
[submodule "src/drivers/uavcan/libuavcan"]
path = src/drivers/uavcan/libuavcan
url = https://gitee.com/robin_shaun/uavcan.git
branch = px4
[submodule "Tools/jMAVSim"]
path = Tools/jMAVSim
url = https://gitee.com/robin_shaun/jMAVSim.git
branch = master
[submodule "Tools/sitl_gazebo"]
path = Tools/sitl_gazebo
url = https://gitee.com/robin_shaun/sitl_gazebo.git
branch = master
[submodule "src/lib/matrix"]
path = src/lib/matrix
url = https://gitee.com/robin_shaun/Matrix.git
branch = master
[submodule "src/lib/ecl"]
path = src/lib/ecl
url = https://gitee.com/robin_shaun/ecl.git
branch = master
[submodule "boards/atlflight/cmake_hexagon"]
path = boards/atlflight/cmake_hexagon
url = https://gitee.com/robin_shaun/cmake_hexagon.git
branch = px4
[submodule "src/drivers/gps/devices"]
path = src/drivers/gps/devices
url = https://gitee.com/robin_shaun/GpsDrivers.git
branch = master
[submodule "src/modules/micrortps_bridge/micro-CDR"]
path = src/modules/micrortps_bridge/micro-CDR
url = https://gitee.com/robin_shaun/micro-CDR.git
branch = px4
[submodule "platforms/nuttx/NuttX/nuttx"]
path = platforms/nuttx/NuttX/nuttx
url = https://gitee.com/robin_shaun/NuttX.git
branch = px4_firmware_nuttx-9.1.0+
[submodule "platforms/nuttx/NuttX/apps"]
path = platforms/nuttx/NuttX/apps
url = https://gitee.com/robin_shaun/NuttX-apps.git
branch = px4_firmware_nuttx-9.1.0+
[submodule "platforms/qurt/dspal"]
path = platforms/qurt/dspal
url = https://gitee.com/robin_shaun/dspal.git
[submodule "Tools/flightgear_bridge"]
path = Tools/flightgear_bridge
url = https://gitee.com/robin_shaun/PX4-FlightGear-Bridge.git
branch = master
[submodule "Tools/jsbsim_bridge"]
path = Tools/jsbsim_bridge
url = https://gitee.com/robin_shaun/px4-jsbsim-bridge.git
[submodule "src/examples/gyro_fft/CMSIS_5"]
path = src/examples/gyro_fft/CMSIS_5
url = https://gitee.com/mirrors/CMSIS_5
git submodule update --init
(2) libuavcan資料夾
cd ~/PX4_Autopilot/src/drivers/uavcan/libuavcangedit .gitmodules
將 .gitmodules 中的內容更換為:
[submodule "dsdl"]
path = dsdl
url = https://gitee.com/robin_shaun/dsdl
branch = legacy-v0
[submodule "libuavcan/dsdl_compiler/pyuavcan"]
path = libuavcan/dsdl_compiler/pyuavcan
url = https://gitee.com/robin_shaun/pyuavcan
[submodule "libuavcan_drivers/kinetis"]
path = libuavcan_drivers/kinetis
url = https://gitee.com/robin_shaun/libuavcan_kinetis.git
git submodule update --init
(3) jMAVSim資料夾
cd ~/PX4_Autopilot/Tools/jMAVSimgedit .gitmodules
將 .gitmodules 中的內容更換為:
[submodule "jMAVlib"]
path = jMAVlib
url = https://gitee.com/robin_shaun/jMAVlib
branch = master
git submodule update --init
(4) sitl_gazebo資料夾
cd ~/PX4_Autopilot/Tools/sitl_gazebogedit .gitmodules
將 .gitmodules 中的內容更換為:
[submodule "external/OpticalFlow"]
path = external/OpticalFlow
url = https://gitee.com/robin_shaun/OpticalFlow
git submodule update --init
(5) dspal資料夾
cd ~/PX4_Autopilot/platforms/qurt/dspalgedit .gitmodules
將 .gitmodules 中的內容更換為:
[submodule "cmake_hexagon"]
path = cmake_hexagon
url = https://gitee.com/robin_shaun/cmake_hexagon
git submodule update --init
(6) pyuavcan資料夾
cd ~/PX4_Autopilot/src/drivers/uavcan/libuavcan/libuavcan/dsdl_compiler/pyuavcangedit .gitmodules
將 .gitmodules 中的內容更換為:
[submodule "dsdl"]
path = dsdl
url = https://gitee.com/robin_shaun/dsdl
git submodule update --init
(7) OpticalFlow資料夾
cd ~/PX4_Autopilot/Tools/sitl_gazebo/external/OpticalFlowgedit .gitmodules
將 .gitmodules 中的內容更換為:
[submodule "external/klt_feature_tracker"]
path = external/klt_feature_tracker
url = https://gitee.com/robin_shaun/klt_feature_tracker
git submodule update --init
(8)終於修改完了,可以再次執行下這句命令
git submodule update --init
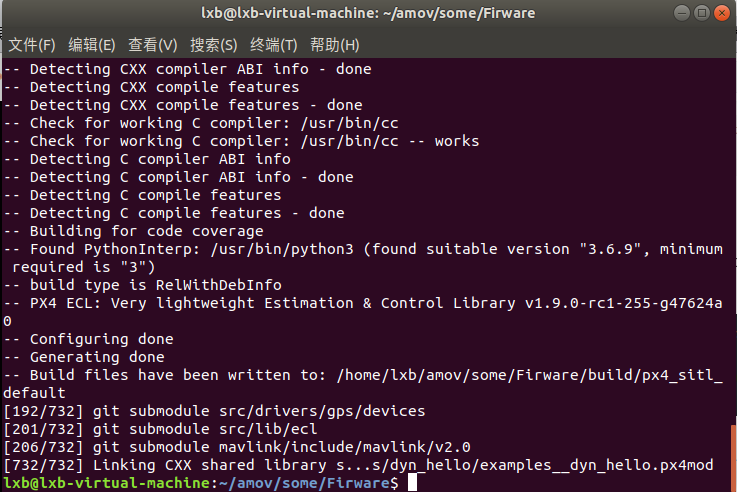
1.4 編譯
cd ~/PX4_Firmware
make px4_sitl_default gazebo
注意:
這一步可能會報錯:ninja: build stopped: subcommand failed.
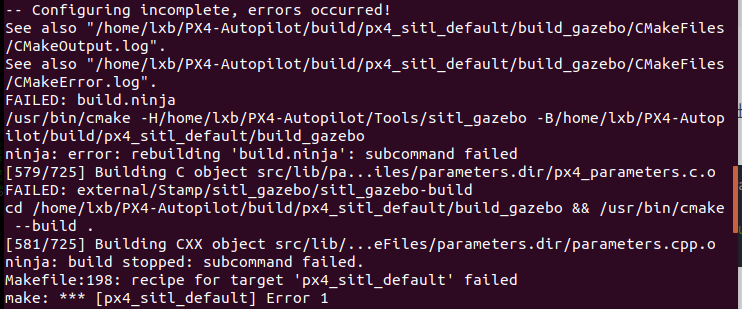
不要慌!
- 先看看子模組是否更新成功。執行命令:
git submodule update --init --recursive
linux哲學,沒有訊息就是好訊息,如果沒有出現任何內容,說明子模組更新成功(看不懂什麼是子模組也沒問題,意思就是到此為止,沒問題)。 - 接下來清理下make環境就ok了:
make clean - 最後再執行一次編譯命令:
make px4_sitl_default
以下是我成功的介面
2. 開啟gazebo make px4_sitl_default gazebo
注意:
如果gazebo出不來,可以這麼做:
- 清理一下:
make distclean - 重新安裝:
sudo apt-get install ros-melodic-gazebo-dev - 再次執行:
make px4_sitl_default gazebo