論文解讀(AGE)《Adaptive Graph Encoder for Attributed Graph Embedding》
論文資訊
論文標題:Adaptive Graph Encoder for Attributed Graph Embedding
論文作者:Gayan K. Kulatilleke, Marius Portmann, Shekhar S. Chandra
論文來源:2020, KDD
論文地址:download
論文程式碼:download
1 Introduction
基於 GCN 的方法有三個主要缺點:
-
- 圖折積濾波器和權值矩陣的糾纏會損害其效能和魯棒性;
- 圖折積濾波器是廣義拉普拉斯平滑濾波器的特殊情況,但沒有保持最優的低通特性;
- 現有演演算法的訓練目標通常是恢復鄰接矩陣或特徵矩陣,處理與現實不符;
AGE 由兩個模組組成:
-
- 拉普拉斯平滑濾波器;
- 自適應編碼器;
首先,一個GCN 編碼器由多個圖折積層組成,每一層包含一個圖折積濾波器 $H$、一個權值矩陣 ($W_1$、$W_2$) 和一個啟用函數。[35] 證明,濾波器和權值矩陣的糾纏並沒有為半監督圖表示學習提供效能增益,甚至損害了訓練效率,因為它加深了反向傳播的路徑。
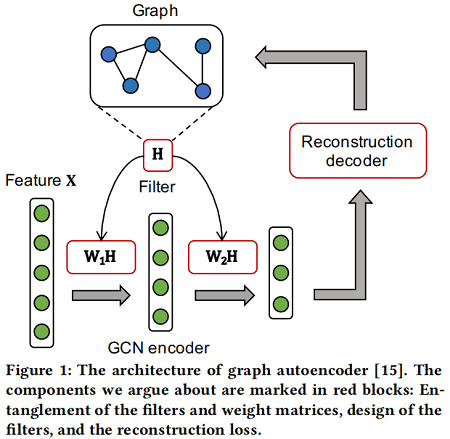
其次,考慮圖折積濾波器, [18] 在理論上表明,它們實際上是應用於低通去噪的特徵矩陣上的拉普拉斯平滑濾波器 [28]。本文證明了現有的圖折積濾波器並不是最優的低通濾波器,因為它們不能過濾某些高頻噪聲。因此,它們不能達到最好的平滑效果。
最後,本文認為這些演演算法的訓練目標(重建鄰接矩陣 [23,31] 或特徵矩陣 [24,32])與現實應用不相容。具體來說,重構鄰接矩陣是將鄰接矩陣設為地面真值成對相似度,但不適合於缺乏特徵資訊的情況。然而,恢復特徵矩陣將迫使模型記住特徵中的高頻噪聲,因此也是不合適的。
2 Method
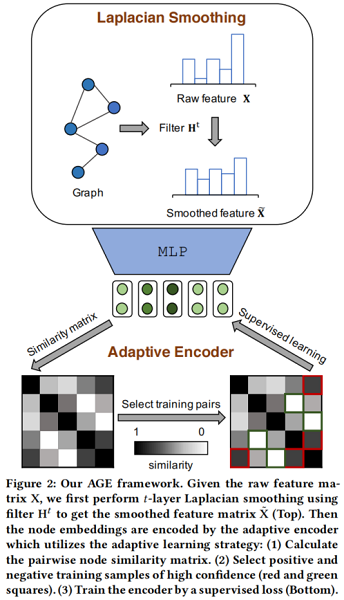
整體框架:
組成部分:
-
- a Laplacian smoothing filter
- Laplacian Smoothing Filter: The designed filter $H$ serves as a low-pass filter to denoise the high-frequency components of the feature matrix $\mathrm{X}$ . The smoothed feature matrix $\tilde{\mathrm{X}}$ is taken as input of the adaptive encoder.
- Laplacian Smoothing Filter: The designed filter $H$ serves as a low-pass filter to denoise the high-frequency components of the feature matrix $\mathrm{X}$ . The smoothed feature matrix $\tilde{\mathrm{X}}$ is taken as input of the adaptive encoder.
- an adaptive encoder
- Adaptive Encoder: To get more representative node embeddings, this module builds a training set by adaptively selecting node pairs which are highly similar or dissimilar. Then the encoder is trained in a supervised manner.
- a Laplacian smoothing filter
2.1 Laplacian Smoothing Filter
基本假設:圖上鄰居節點具有相似性。
2.1.1 Analysis of Smooth Signals
從圖訊號處理的角度來解釋圖平滑。以 $\mathbf{x} \in \mathbb{R}^{n}$ 作為圖訊號,每個節點被分配一個值向量。為測量圖訊號 $x$ 的平滑度,可以計算出圖拉普拉斯矩陣 $L$ 和 $x$ 上的瑞利商:
${\large R(\mathbf{L}, \mathbf{x})=\frac{\mathbf{x}^{\boldsymbol{\top}} \mathbf{L} \mathbf{x}}{\mathbf{x}^{\top} \mathbf{x}}=\frac{\sum\limits_{(i, j) \in \mathcal{E}}\left(x_{i}-x_{j}\right)^{2}}{\sum\limits_{i \in \mathcal{V}} x_{i}^{2}}} \quad\quad\quad(1)$
PS:拉普拉斯矩陣的性質
$\begin{aligned}f^{T} L f &=f^{T} D f-f^{T} W f \\&=\sum \limits_{i=1}^{N} d_{i} f_{i}^{2}-\sum \limits_{i=1}^{N} \sum \limits_{j=1}^{N} w_{i j} f_{i} f_{j} \\&=\frac{1}{2}\left(\sum \limits_{i=1}^{N} d_{i} f_{i}^{2}-2 \sum \limits_{i=1}^{N} \sum \limits_{j=1}^{N} w_{i j} f_{i} f_{j}+\sum \limits_{j=1}^{N} d_{j} f_{j}^{2}\right) \\&=\frac{1}{2}\left(\sum \limits_{i=1}^{N} \sum \limits_{j=1}^{N} w_{i j} f_{i}^{2}-2 \sum \limits_{i=1}^{N} \sum \limits_{j=1}^{N} w_{i j} f_{i} f_{j}+\sum \limits_{i=1}^{N} \sum \limits_{j=1}^{N} w_{i j} f_{j}^{2}\right) \\&=\frac{1}{2} \sum \limits_{i=1}^{N} \sum \limits_{j=1}^{N} w_{i j}\left(f_{i}-f_{j}\right)^{2}\end{aligned}$
$\text{Eq.1}$ 顯然是 $x$ 的標準化方差分數。平滑訊號應該在相鄰節點上分配相似的值。因此,假設瑞利商較低的訊號更平滑,接著給出特徵向量 $u_i$ 的光滑性度量:
${\large R\left(\mathbf{L}, \mathbf{u}_{i}\right)=\frac{\mathbf{u}_{i}^{\top} \mathbf{L} \mathbf{u}_{i}}{\mathbf{u}_{i}^{\top} \mathbf{u}_{i}}=\lambda_{i}} \quad\quad\quad(2)$
$\text{Eq.2}$ 表示平滑的特徵向量與較小的特徵值相關聯,即較低的頻率。因此,基於$\text{Eq.1}$、$\text{Eq.2}$ $L$ 分解訊號 $x$):
$\mathbf{x}=\mathbf{U p}=\sum\limits _{i=1}^{n} p_{i} \mathbf{u}_{i} \quad\quad\quad(3)$
其中 $p_{i}$ 是特徵向量 $\mathbf{u}_{i}$ 的係數,那麼 $x$ 的平滑度是:
${\large R(\mathbf{L}, \mathbf{x})=\frac{\mathbf{x}^{\top} \mathbf{L} \mathbf{x}}{\mathbf{x}^{\top} \mathbf{x}}=\frac{\sum \limits_{i=1}^{n} p_{i}^{2} \lambda_{i}}{\sum \limits_{i=1}^{n} p_{i}^{2}} } \quad\quad\quad(4)$
因此,為獲得更平滑的訊號,本文濾波器的目標是在保留低頻分量的同時濾掉高頻分量。
2.1.2 Generalized Laplacian Smoothing Filter
如[28]所述,廣義拉普拉斯平滑濾波器為:
$\mathbf{H}=\mathbf{I}-k \mathbf{L} \quad\quad\quad(5)$
採用 $\mathbf{H}$ 作為濾波器矩陣,濾波後的訊號 $\tilde{\mathbf{x}}$ 為:
${\large \tilde{\mathbf{x}}=\mathbf{H x}=\mathbf{U}(\mathbf{I}-k \Lambda) \mathbf{U}^{-1} \mathbf{U p}=\sum \limits_{i=1}^{n}\left(1-k \lambda_{i}\right) p_{i} \mathbf{u}_{i}=\sum \limits_{i=1}^{n} p^{\prime} \mathbf{u}_{i} } \quad\quad\quad(6)$
因此,為實現低通濾波(low-pass filtering),頻率響應函數 $1-k \lambda$ 應是一個遞減和非負函數。疊加 $t$ 次拉普拉斯平滑濾波器,將濾波後的特徵矩陣 $\tilde{\mathbf{X}}$ 表示為
$\tilde{\mathbf{X}}=\mathbf{H}^{t} \mathbf{X} \quad\quad\quad(7)$
請注意,該過濾器根本是非引數化的。
2.1.3 The Choice of k
在實踐中,使用重整化技巧 $\tilde{\mathrm{A}}=\mathrm{I}+\mathbf{A}$,採用對稱歸一化圖拉普拉斯矩陣
$\tilde{\mathbf{L}}_{s y m}=\tilde{\mathbf{D}}^{-\frac{1}{2}} \tilde{\mathbf{L}} \tilde{\mathbf{D}}^{-\frac{1}{2}} \quad\quad\quad(8)$
此時濾波器為:
$\mathbf{H}=\mathbf{I}-k \tilde{\mathbf{L}}_{s y m} \quad\quad\quad(9)$
注意,如果設定 $k=1$,濾波器將成為 GCN 濾波器。
為選擇最優 $k$,需要計算特徵值 $\tilde{\Lambda}$ 的分佈(由 $\tilde{\mathbf{L}}_{s y m}=\tilde{\mathbf{U}} \tilde{\Lambda} \tilde{U}^{-1}$ 分解得到)。
$\tilde{\mathbf{x}}$ 的平滑度是
${\large R(\mathbf{L}, \tilde{\mathbf{x}})=\frac{\tilde{\mathbf{x}}^{\top} \mathbf{L} \tilde{\mathbf{x}}}{\tilde{\mathbf{x}} \boldsymbol{\tilde { \mathbf { x } }}}=\frac{\sum_{i=1}^{n} p^{\prime}{ }_{i}^{2} \lambda_{i}}{\sum_{i=1}^{n} p^{\prime}{ }_{i}^{2}}} \quad\quad\quad(10)$
因此,$p^{\prime}{ }_{i}^{2}$ 應隨 $\lambda_{i}$ 的增加而減少。將最大特徵值表示為 $\lambda_{\max }$,理論上,如果 $k>1 / \lambda_{\max }$ ,濾波器在 $\left(1 / k, \lambda_{\max }\right]$ 內不是低通,因為 $p^{\prime}{ }_{i}^{2}$ 在這個間隔內增加;如果 $k<1 / \lambda_{\max }$ 該濾波器不能使去出高頻噪聲部分。因此,$k=1 / \lambda_{\max }$ 是最優選擇。
[7] 證明了拉普拉斯特徵值的範圍在 $\text{0~2}$ 之間,因此GCN濾波器在 $(1,2]$ 區間內不是低通的。工作 [31] 相應地選擇了 $k=1/2$,然而,我們的實驗表明,在重整化後,最大特徵值 $\lambda_{\max }$ 將縮小到 $3/2$ 左右,這使得 $1/2$ 不是最優。在實驗中,我們計算每個資料集的 $\lambda_{\max }$,並設定 $k=1 / \lambda_{\max }$,並進一步分析了不同 $k$ 值的影響。
3 Adaptive Encoder
通過 $t$ 層拉普拉斯平滑過濾,輸出特徵更平滑,保持豐富的屬性資訊。本文自適應地選擇高相似度的節點對作為正訓練樣本,而低相似度的節點對作為負訓練樣本。
給定過濾後的節點特徵 $\tilde{\mathbf{X}}$,節點嵌入由線性編碼器 $f$ 進行編碼:
$\mathbf{Z}=f(\tilde{\mathbf{X}} ; \mathbf{W})=\tilde{\mathbf{X}} \mathbf{W} \quad\quad\quad(11)$
其中,$\mathbf{W}$ 是權重矩陣。然後,為度量節點的成對相似度,利用餘弦相似度。相似度矩陣 $S$ 為:
$\mathrm{S}=\frac{\mathrm{ZZ}^{\boldsymbol{T}}}{\|\mathrm{Z}\|_{2}^{2}} \quad\quad\quad(12)$
接下來,我們將詳細描述我們的訓練樣本選擇策略。
3.1 Training Sample Selection.
在計算相似矩陣後,對相似序列按降序排列。這裡 $r_{i j}$ 是節點對的排序位置 $\left(v_{i}, v_{j}\right)$。然後將正樣本的最大排序位置設為 $r_{p o s}$,將負樣本的最小排序位置設為 $r_{n e g}$。因此,為節點對 $\left(v_{i}, v_{j}\right)$ 生成的標籤為
$l_{i j}=\left\{\begin{array}{ll}1 & r_{i j} \leq r_{p o s} \\0 & r_{i j}>r_{n e g} \\\text { None } & \text { otherwise }\end{array}\right. \quad\quad\quad(13)$
這樣,構造了一個包含 $r_{\text {pos }}$ 個正樣本和 $n^{2}-r_{n e g}$ 個負樣本的訓練集。在第一次構造訓練集時,由於編碼器沒有被認訓練, 直接使用平滑的特徵來初始化 $\mathbf{S}$ :
$\mathbf{S}=\frac{\widetilde{\mathbf{X}} \widetilde{\mathbf{X}}^{\mathbf{T}}}{\|\widetilde{\mathbf{X}}\|_{2}^{2}} \quad\quad\quad(14)$
構造好訓練集後,可以用監督的方式訓練編碼器。在真實世界的圖中,不相似的節點對總是遠遠多於正節點對,因此在訓 練集中選擇多於 $r_{p o s}$ 個負樣本。為了平衡正/負樣本,在每次迭代中隨機選擇 $r_{p o s}$ 個負樣本。平衡訓練集用 $\mathcal{O}$ 表示。因 此,交叉熵損失表示如下:
$\mathcal{L}=\sum \limits_{\left(v_{i}, v_{j}\right) \in O}-l_{i j} \log \left(s_{i j}\right)-\left(1-l_{i j}\right) \log \left(1-s_{i j}\right) \quad\quad\quad(15)$
3.2 Thresholds Update
在實踐中,隨著訓練過程的進行,$r_{\text {pos }}$ 減少,而 $r_{n e g}^{s t}$ 呈線性增加。將初始閾值設定為 $r_{\text {pos }}^{s t}$ 和 $r_{n e g}^{s t}$,最終閾值設定為 $r_{\text {pos }}^{e d}$ 和 $r_{n e g}^{e d}$ 。有 $r_{\text {pos }}^{e d} \leq r_{\text {pos }}^{s t}$ 和 $r_{n e g}^{e d} \geq r_{\text {neg. }}^{s t}$。假設閾值被更新為 $T$次,我們將更新策略表示為
${\large r_{\text {pos }}^{\prime}=r_{p o s}+\frac{r_{\text {pos }}^{e d}-r_{\text {pos }}^{s t}}{T}} \quad\quad\quad(16)$
${\large r_{n e g}^{\prime}=r_{n e g}+\frac{r_{n e g}^{e d}-r_{n e g}^{s t}}{T}} \quad\quad\quad(17)$
隨著訓練過程的進行,每次閾值更新時,都會重建訓練集並儲存嵌入。
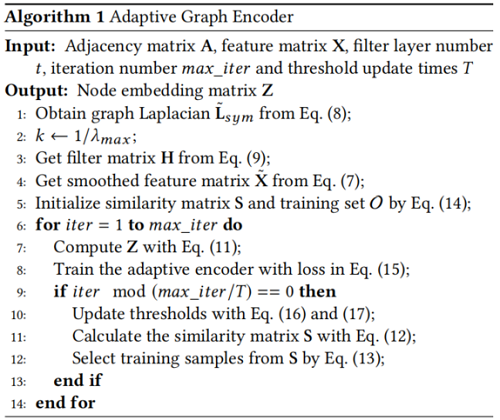
對於節點聚類,我們對儲存嵌入的相似矩陣進行譜聚類[22],利用戴維斯堡丁索引[8](DBI)選擇最佳時期,在沒有標籤資訊的情況下測量聚類質量。對於鏈路預測,我們在驗證集上選擇執行得最好的歷元。Algorithm 1 給出了計算嵌入矩陣 $Z$ 的總體過程。
4 Experiments
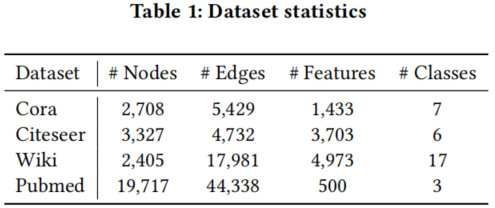
資料集
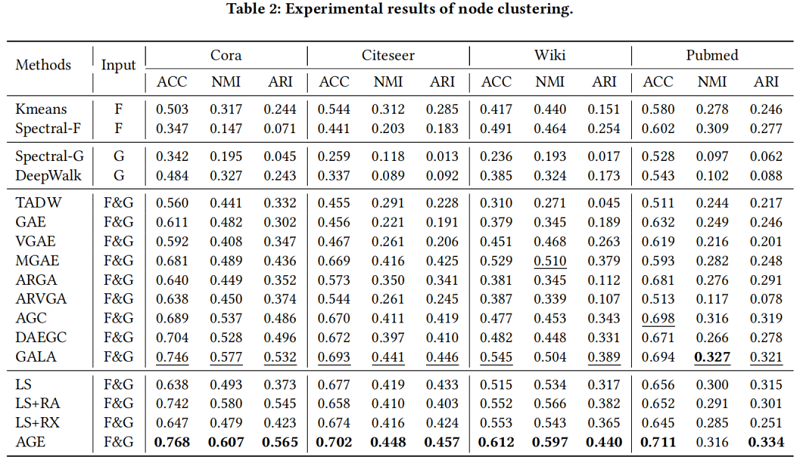
節點聚類
-----------------------------------------------------------------------------------------------------
https://zhuanlan.zhihu.com/p/440760513
https://zhuanlan.zhihu.com/p/432080955
因上求緣,果上努力~~~~ 作者:Learner-,轉載請註明原文連結:https://www.cnblogs.com/BlairGrowing/p/16316452.html