《ROS機器人程式設計》期中測評試卷 (ROS2)
課程以ROS2-F/G版講解為主。
文字版:
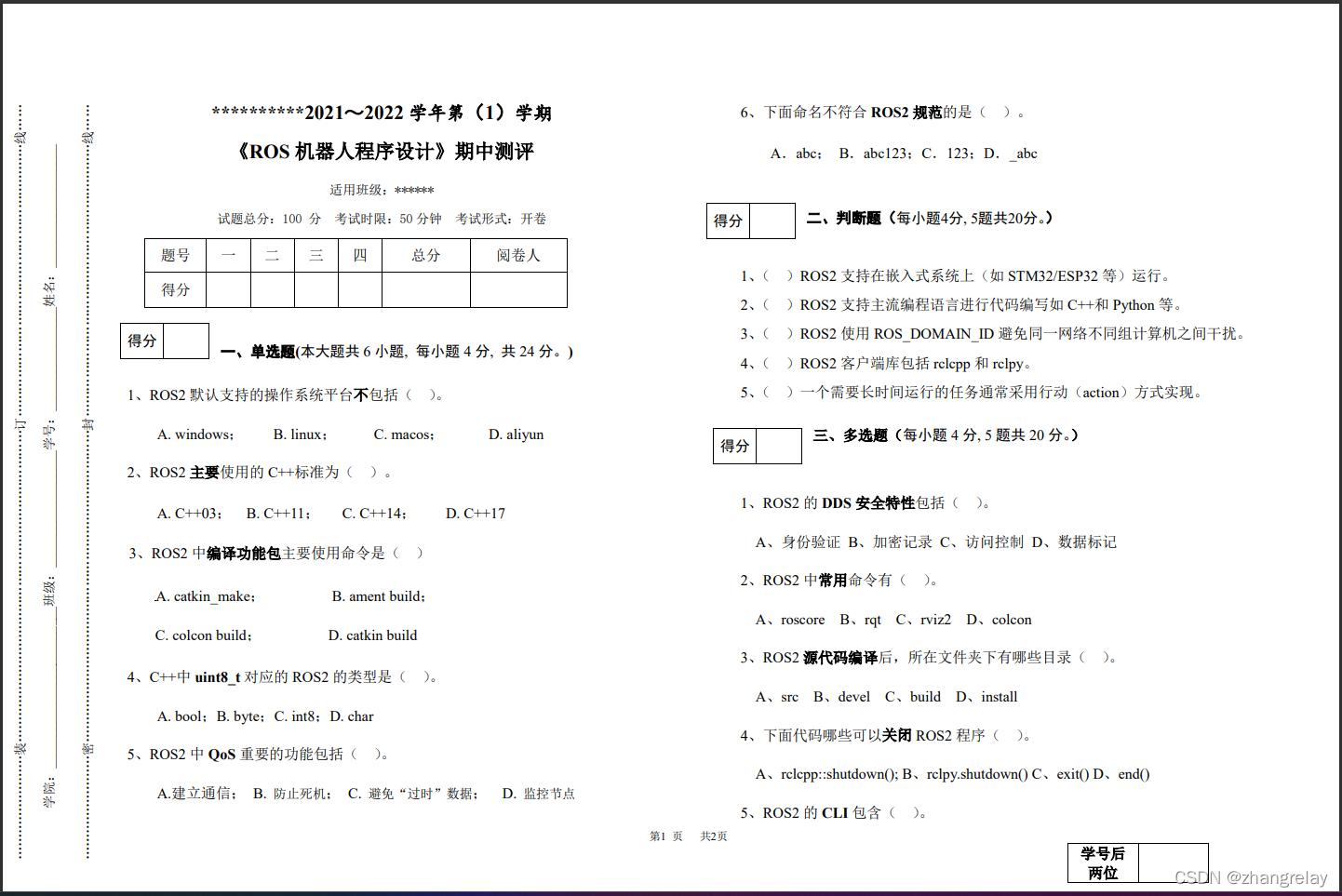
一、單選題(本大題共6小題, 每小題4分, 共24分。)
1、ROS2預設支援的作業系統平臺不包括( )。
A. windows; B. linux; C. macos; D. aliyun
2、ROS2主要使用的C++標準為( )。
A. C++03; B. C++11; C. C++14; D. C++17
3、ROS2中編譯功能包主要使用命令是( )
A. catkin_make; B. ament build;
C. colcon build; D. catkin build
4、C++中uint8_t對應的ROS2的型別是( )。
A. bool;B. byte;C. int8;D. char
5、ROS2中QoS重要的功能包括( )。
A.建立通訊; B. 防止宕機; C. 避免「過時」資料; D. 監控節點
6、下面命名不符合ROS2規範的是( )。
A.abc; B.abc123;C.123;D._abc
二、判斷題(每小題4分, 5題共20分。)
1、( )ROS2支援在嵌入式系統上(如STM32/ESP32等)執行。
2、( )ROS2支援主流程式語言進行程式碼編寫如C++和Python等。
3、( )ROS2使用ROS_DOMAIN_ID避免同一網路不同組計算機之間干擾。
4、( )ROS2使用者端庫包括rclcpp和rclpy。
5、( )一個需要長時間執行的任務通常採用行動(action)方式實現。
三、多選題(每小題4分, 5題共20分。)
1、ROS2的DDS安全特性包括( )。
A、身份驗證 B、加密記錄 C、存取控制 D、資料標記
2、ROS2中常用命令有( )。
A、roscore B、rqt C、rviz2 D、colcon
3、ROS2原始碼編譯後,所在資料夾下有哪些目錄( )。
A、src B、devel C、build D、install
4、下面程式碼哪些可以關閉ROS2程式( )。
A、rclcpp::shutdown(); B、rclpy.shutdown() C、exit() D、end()
5、ROS2的CLI包含( )。
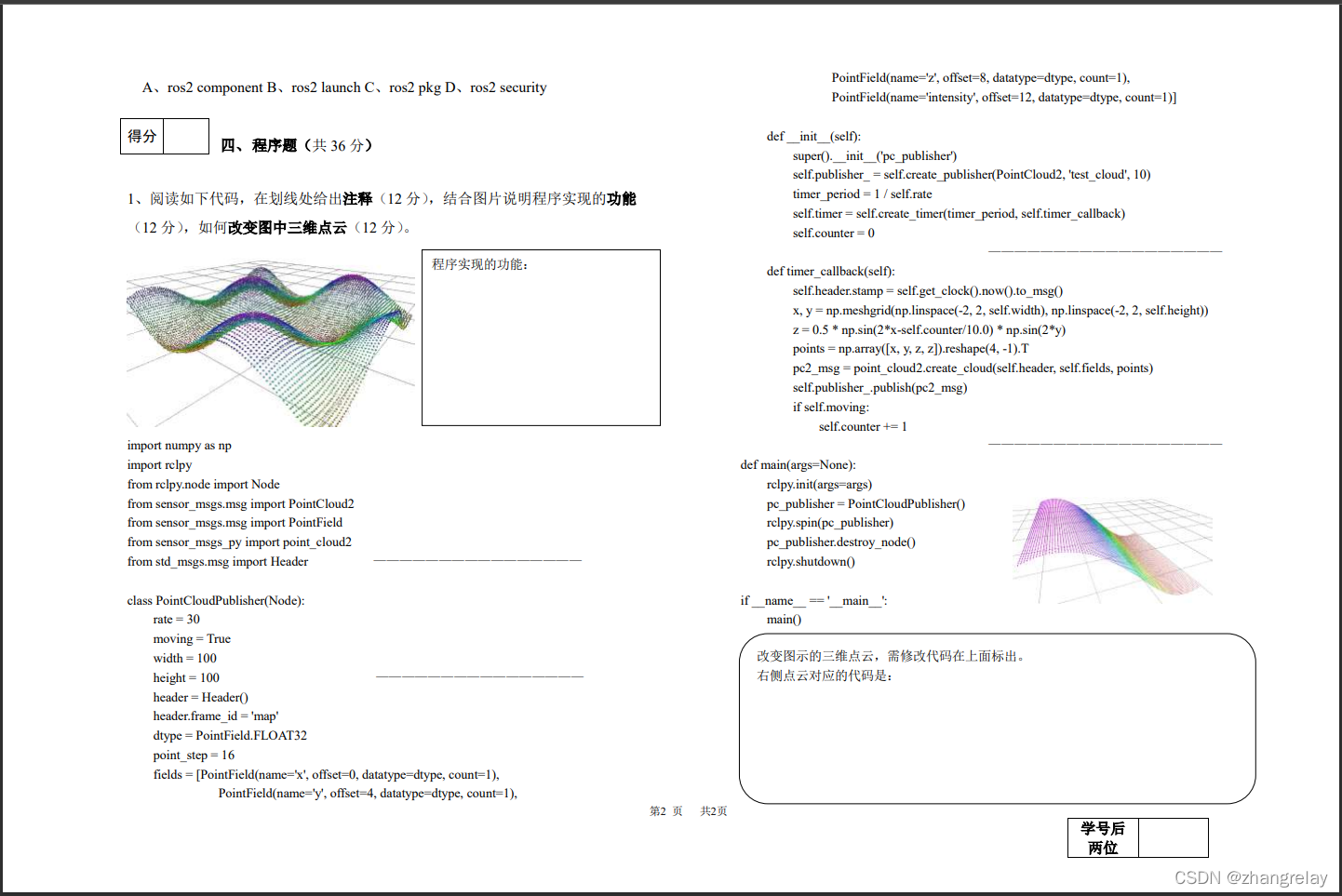
A、ros2 component B、ros2 launch C、ros2 pkg D、ros2 security
程式題(共36分)
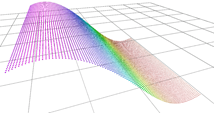
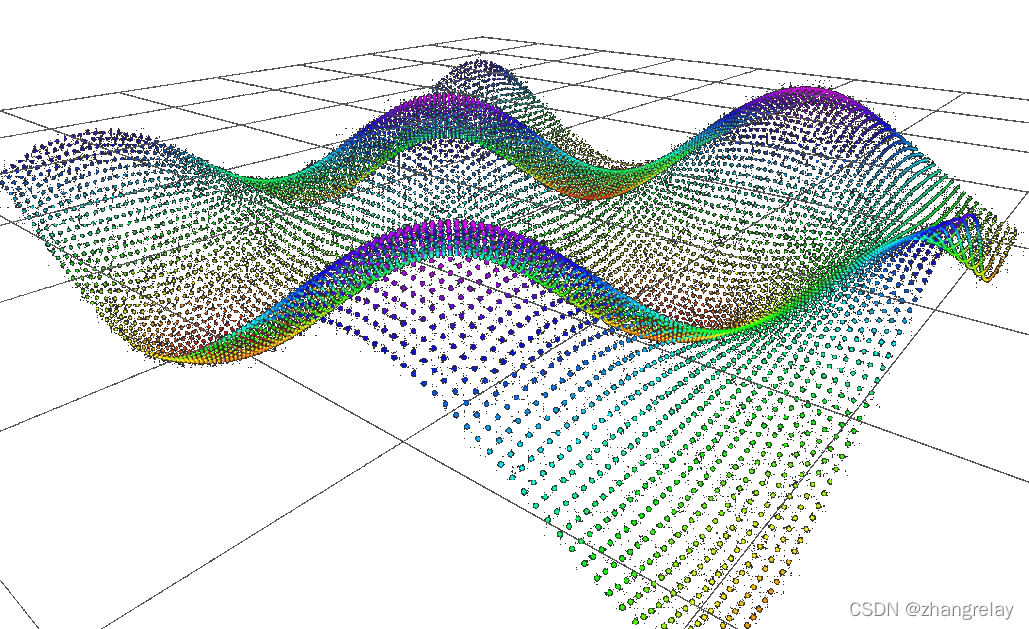
閱讀如下程式碼,在劃線處給出註釋(12分),結合圖片說明程式實現的功能(12分),如何改變圖中三維點雲(12分)。
import numpy as np
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import PointCloud2
from sensor_msgs.msg import PointField
from sensor_msgs_py import point_cloud2
from std_msgs.msg import Header ————————————————
class PointCloudPublisher(Node):
rate = 30
moving = True
width = 100
height = 100 ————————————————
header = Header()
header.frame_id = 'map'
dtype = PointField.FLOAT32
point_step = 16
fields = [PointField(name='x', offset=0, datatype=dtype, count=1),
PointField(name='y', offset=4, datatype=dtype, count=1),
PointField(name='z', offset=8, datatype=dtype, count=1),
PointField(name='intensity', offset=12, datatype=dtype, count=1)]
def __init__(self):
super().__init__('pc_publisher')
self.publisher_ = self.create_publisher(PointCloud2, 'test_cloud', 10)
timer_period = 1 / self.rate
self.timer = self.create_timer(timer_period, self.timer_callback)
self.counter = 0
——————————————————
def timer_callback(self):
self.header.stamp = self.get_clock().now().to_msg()
x, y = np.meshgrid(np.linspace(-2, 2, self.width), np.linspace(-2, 2, self.height))
z = 0.5 * np.sin(2*x-self.counter/10.0) * np.sin(2*y)
points = np.array([x, y, z, z]).reshape(4, -1).T
pc2_msg = point_cloud2.create_cloud(self.header, self.fields, points)
self.publisher_.publish(pc2_msg)
if self.moving:
self.counter += 1
——————————————————
def main(args=None):
rclpy.init(args=args)
pc_publisher = PointCloudPublisher()
rclpy.spin(pc_publisher)
pc_publisher.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()