linux核心驅動框架編寫及編譯
2020-10-19 18:00:21
驅動程式碼的編寫
**基本框架:**
#include <linux/fs.h> //file_operations宣告
#include <linux/module.h> //module_init modele_exit宣告
#include <linux/init.h> // _init _exit 宏定義宣告
#include <linux/device.h> // class device 宣告
#include <linux/uaccess.h> //copy_from_user 型別宣告
#include <linux/types.h> //裝置號 dev_t 型別宣告
#include <asm/io.h> // ioremap iounmap的標頭檔案
static struct class *pin4_class;
static struct device *pin4_class_dev;
static dev_t devno; //裝置號
static int major = 231; //主裝置號
static int minor = 0; //次裝置號
static char *module_name = "pin4"; //模組名
static ssize_t pin4_read(struct file *file, const char __user *buf, size_t count, loff_t *ppos)
{
printk("pin4_read\n");
return 0;
}
//led_open函數
static int pin4_open(struct inode *inode, struct file *file)
{
printk("pin4_open\n"); //核心的列印函數,和Printf類似
return 0;
}
//led_write函數
static ssize_t pin4_write(struct file *file, const char __user *buf, size_t count, loff_t *ppos)
{
printk("pin4_write\n");
return 0;
}
static struct file_operations pin4_fops =
{
.owner = THIS_MODULE,
.open = pin4_open,
.write = pin4_write,
.read = pin4_read,
};
int __init pin4_drv_init(void) //1. 真實驅動入口
{
int ret;
devno = MKDEV(major,minor); //2. 建立裝置號
ret = register_chrdev( major, module_name, &pin4_fops); // 3. 註冊驅動告訴核心 把這個驅動加入到核心的連結串列中
pin4_class = class_create( THIS_MODULE, "myfirstdemo" ); // 讓程式碼在/dev下自動生成裝置 (建立一個類)
pin4_class_dev = device_create( pin4_class, NULL, devno, NULL, module_name);//建立裝置檔案(在類下面生成一個裝置)
return 0;
}
void __exit pin4_drv_exit(void)
{
device_destroy(pin4_class,devno); //銷燬裝置
class_destroy(pin4_class); //銷燬類
unregister_chrdev( major, module_name); //解除安裝驅動
}
module_init(pin4_drv_init); //入口 核心載入該驅動的時候,這個宏會被呼叫
module_exit(pin4_drv_exit);
MODULE_LICENSE("GPL v2");
核心驅動編譯
1.將驅動程式碼cp到如圖檔案目錄下
2.修改Makefile 告訴編譯器要編譯該驅動檔案 輸入命令:vi Makefile 進入Makefile 新增下圖內容

obj-m == 以模組化的方式進行編譯
3.開始核心編譯
(這時候得返回到樹莓派-linux原始碼目錄下進行驅動編譯)
指令:ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make modules
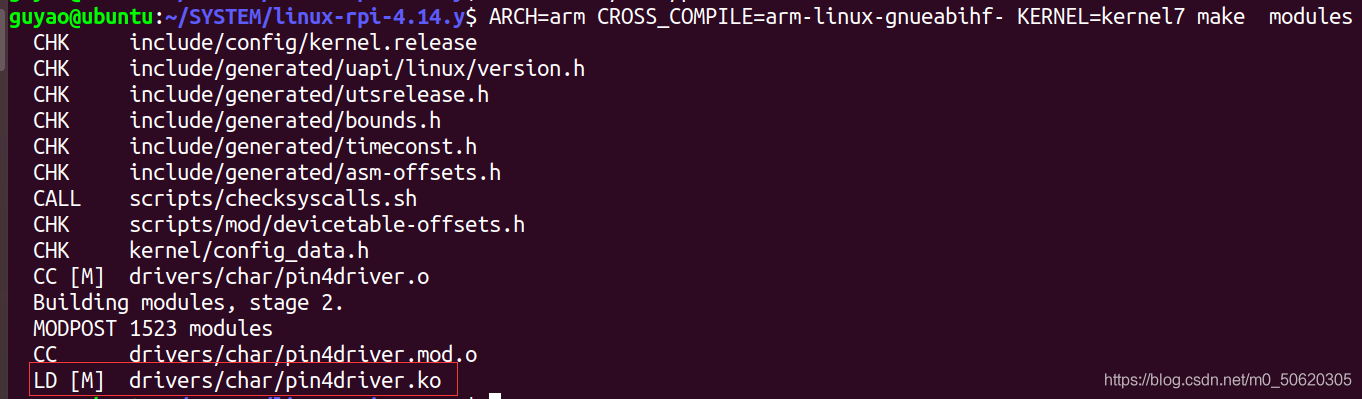
編譯成功後會在/SYSTEM/linux-rpi-4.14.y/drivers/char目錄下生成 pin4driver.ko檔案,

4.將pin4driver.ko檔案scp到樹莓派的/home/pi下

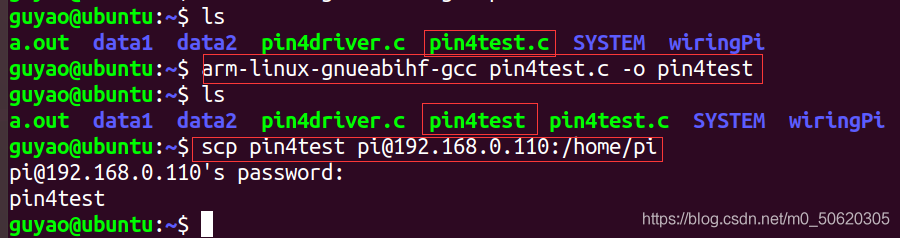
5.同時將pin4test.c交叉編譯後scp到樹莓派的/home/pi下進行驅動的測試
6.樹莓派 - - 核心驅動裝載 指令:sudo insmod pin4driver.ko

安裝完成後可在dev下檢視到 pin4 這個驅動
7.驅動測試 執行 ./pin4test
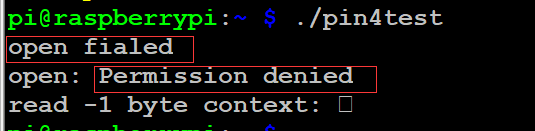
執行之後發現沒有許可權,這時候我們改變 pin4 驅動的許可權
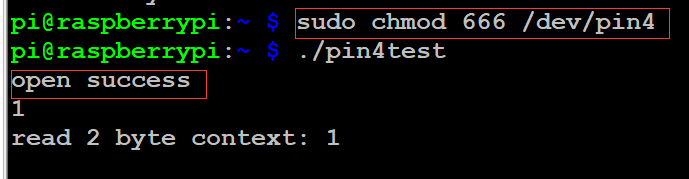
8.更改驅動許可權
dmsg可檢視核心態執行狀態

核心驅動解除安裝:sudo rmmod xxx不需要寫ko
檢視核心模組: lsmod
pin4test 測試驅動程式碼
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
int main()
{
int fd;
char buf[32];
int n_read;
fd = open("/dev/pin4",O_RDWR);
if(fd<0){
printf("open fialed\n");
perror("open");
}else{
printf("open success\n");
}
fd = write(fd,'1',1);
n_read = read(fd,buf,sizeof(buf)/sizeof(char));
printf("read %d byte context: %s\n",n_read, buf );
}