PCF8591使用及Python控制
PCF8591使用及Python控制
INTRODUCTION
大家一定對於PCF8591晶片,對於其中的A0、A1、A2、channel0-channel3、AIN0-AIN3、AOUT、SCL、SDA等等以及I2C協定有著很大的困惑。同時也沒有完全理解Python程式碼中的0x40、0x41、0x42、0x43、0x48到底是什麼,bus.write_byte(0x48, 0x40) bus.write_byte(0x48, 0x40, value) bus.read_byte(0x48)這些程式碼到底控制什麼。
這篇文章將幫助大家理清以上內容。
一、PCF8591與Raspberry Pi的關係
做一個很簡單的形象化,將整個系統看作一個進水/出水裝置。
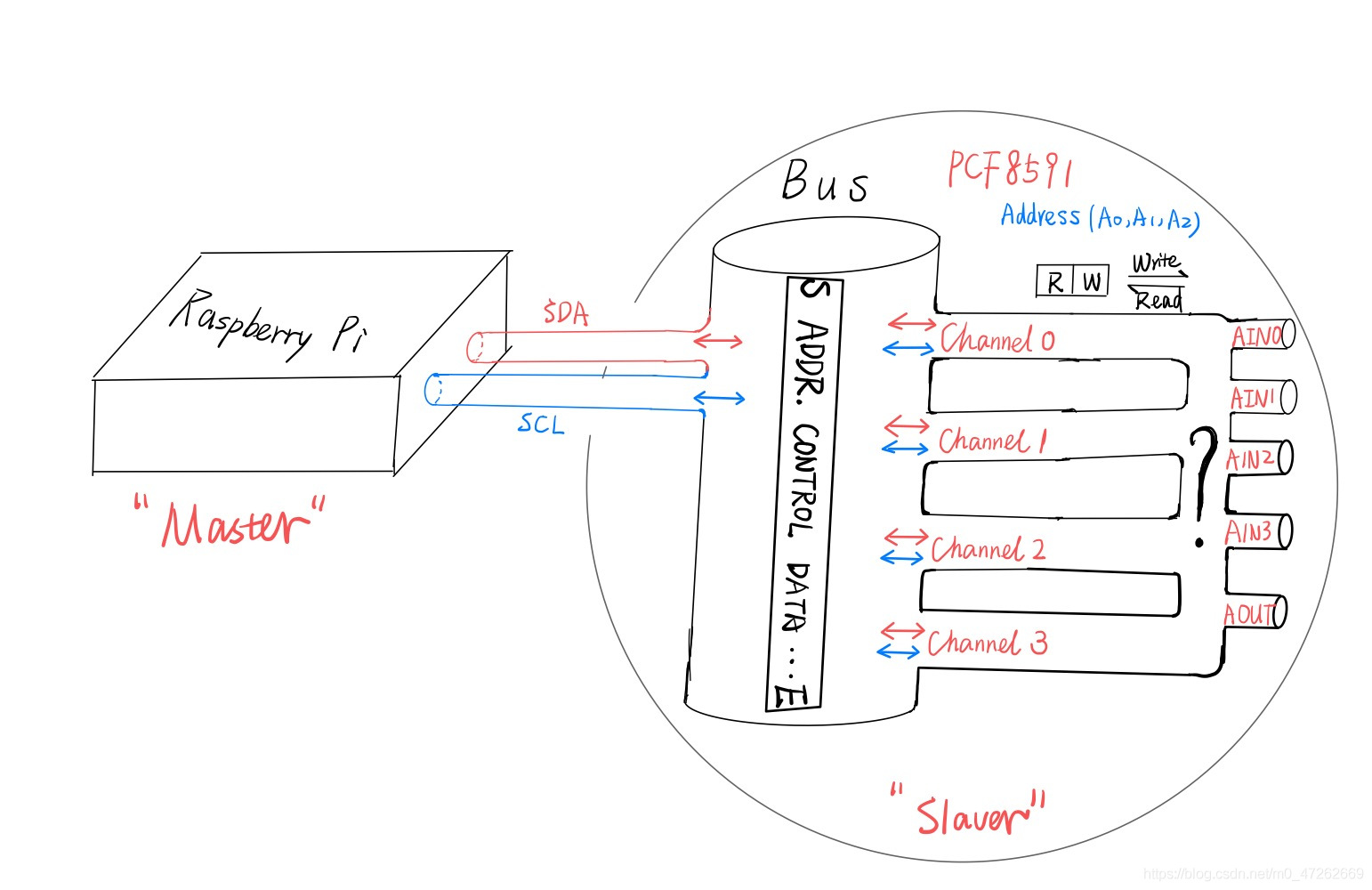
裝置有四根進水管,分別命名為AIN0, AIN1, AIN2, AIN3,還有唯一一根出水管,命名為AOUT。還有四個中轉通道,分別命名為channel0, channel1, channel2, channel3,從四根進水管進來的水可以受控制地從某一個通道中流出,進入總管道,之後通過兩根出水管道——SDA和SCL,進入一個水的加工處理儲存裝置。
Raspberry PI是「MASTER」,PCF是「SLAVER」,他們之間是主從關係。如果主器件要傳送資料給從器件,則會啟動資料傳輸,並行送資料至從器件,最後終止資料傳輸;如果主器件想要接受從器件發來的資料,同樣也是發出命令啟動資料傳輸,接收從器件發來的資料,最後終止接收過程。
強調一點:每次資料傳輸都是由「MASTER」主動開啟的。
是否清晰了一些?理清總的關係以後我們再來看具體細節。
二、PCF的地址與A0-A2引腳
一個「MASTER」不可能只有一個「SLAVER」。所以對於「MASTER」來說,需要給「SLAVERS」編號,以便控制、命令。這個編號也就是PCF地址。地址的編碼規則如下圖:
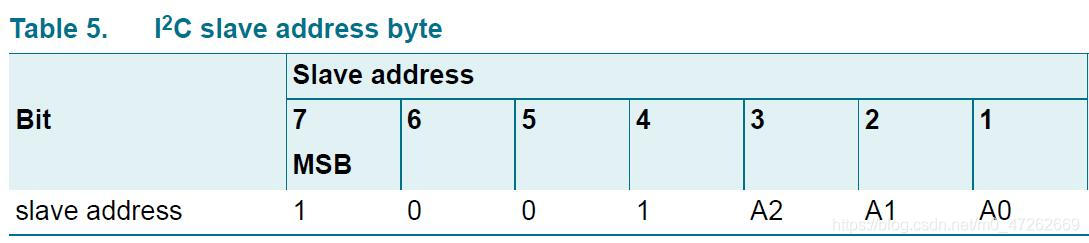
可以看出,這是一個七位二進位制數,前四位是fixed number,後三位分別對應PCF的三個引腳——A0, A1, A2。每一個引腳的值都可以是0或1,一共2^3=8種排列方式,也即一共8個可使用的地址。所以一個「MASTER」最多能同時控制8個「SLAVER」。對於PCF8591來說,其default address為0x48(十六進位制數),轉換為二進位制數是1001000,所以可以知道他的A0、A1、A2三個引腳值均為0。
需要再提前強調一點,Python程式碼中所有0x十六進位制數,只有0x48代表Address,也只有PCF擁有Address,其餘所有十六進位制數都不代表Address。(這是一個天坑)
三、I2C協定與SDA SCL
「MASTER」與「SLAVERS」之間需要有溝通交流,給「SLAVER」分配工作或是讓「SLAVER」彙報工作,並告知「SLAVER」如何做。所以他們之間有一個特定的溝通方式,這個溝通方式就叫I^2 C通訊協定(Inter-Integrated Circuit)。I^2 C匯流排需要兩根線來實現連線於匯流排上的器件之間的資訊傳輸,一根是SDA(Serial Data)序列傳輸線,另一根是SCL(Serial Clock)序列時鐘線。
下圖是AD convert的I2C資料傳輸流程。
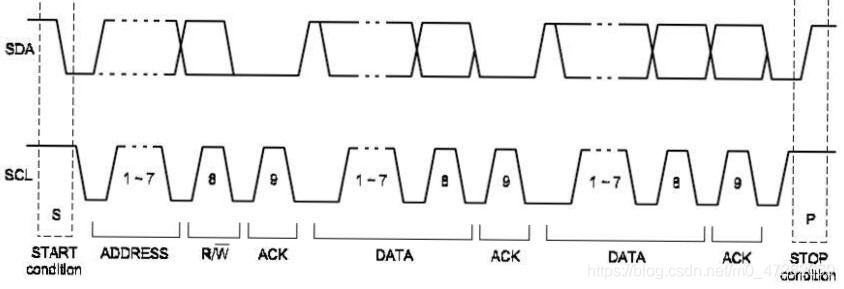
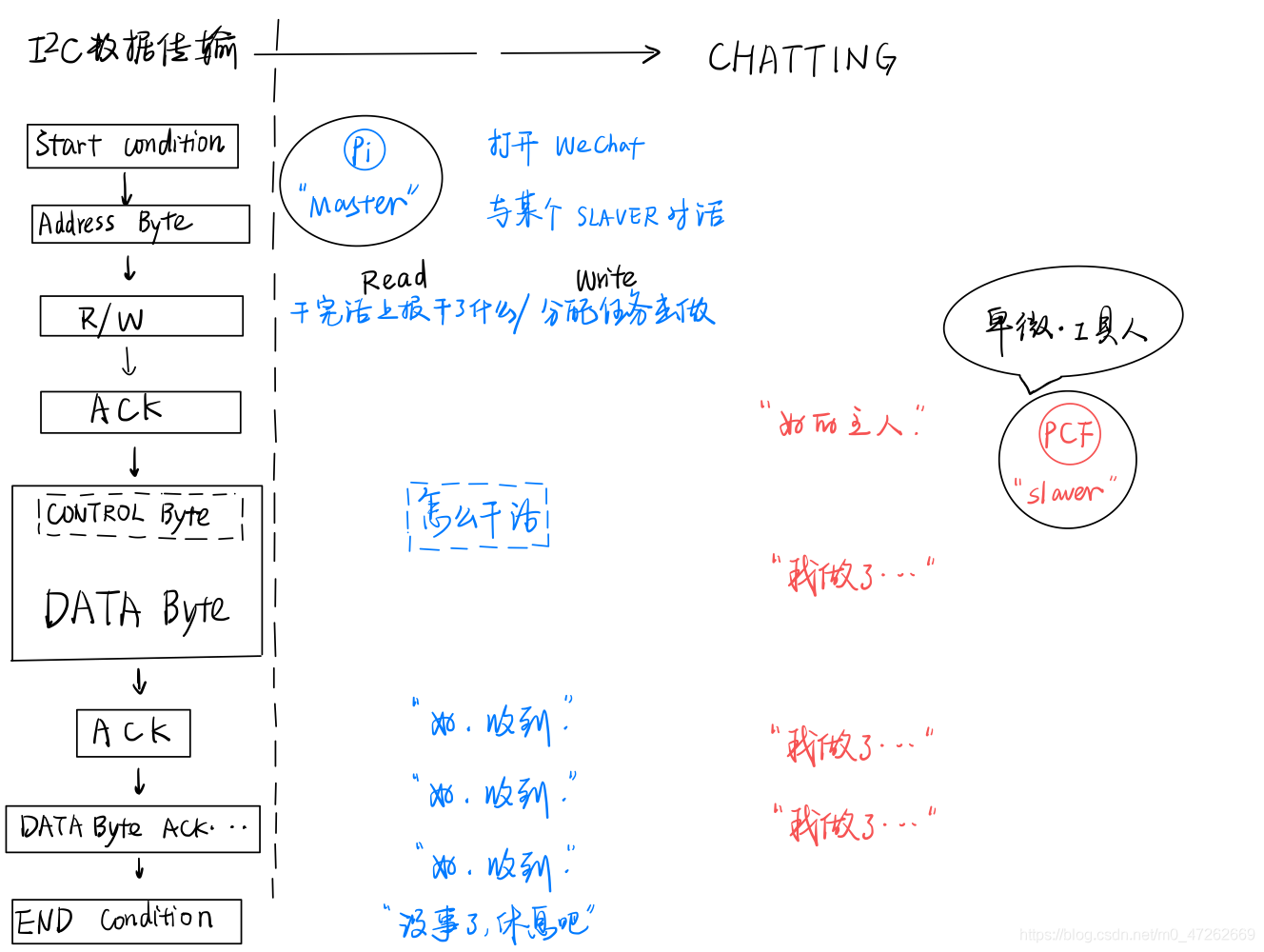
是不是很令人迷惑?沒關係,形象化的解釋來了。之前有說過,I2C就是一種溝通方式,所以這個資料傳輸流程,就可以理解為在I2C這種特定溝通方式下的一次溝通。講的更通俗一點,就是一次聊天對話。如何理解?
聊天的第一步,是拿出手機開啟微信。(對應START condition,當SDA和SCL兩條線的電平同時滿足某一特定條件時,傳輸開始。)
開啟微信後需要找一個聯絡人才能聊天,我們之前說「MASTER」有很多「SLAVERS」,這一步便是「MASTER」選擇與某一個「SLAVER」對話。(對應ADDRESS。)
第三步,「MASTER」確定這次對話的目的的給「SLAVER」分配活兒幹,還是讓「SLAVER」幹完活後彙報。(對應R/W,R means read,W means write,控制這次資料傳輸的目的是樹莓派寫入一個值到PCF中,還是樹莓派從PCF中讀取一個值。)
可以看到有很多ACK。ACK means Acknowledge character,即確認字元,意思是資料接收者告訴資料傳輸者,「已收到」。
之後便是資料傳輸,每傳輸一個byte的資料,都會反饋一個ACK確認資料收到。
四、Python程式碼控制讀取/寫入值
import smbus
import time
if __name__ == "__main__":
bus=smbus.SMBus(1)
bus.write_byte(0x48,0x42)
bus.read_byte(0x48)
while True:
num= bus.read_byte(0x48)
print(num)
bus.write_byte_data(0x48,0x42,160)
time.sleep(0.01)
其實程式碼非常簡單。之前參考文獻給出的程式碼令人迷惑的原因主要是自定義了很多方法。現在用最簡單的辦法寫出來,用到的核心方法只有三個:
bus.read_byte(ADDRESS)
bus.write_byte(ADDRESS, CONTROL_byte)
bus.write_byte_data(ADDRESS, CONTROL_byte, value)
顧名思義,read_byte就是從PCF中讀取一個byte的資料, write_byte就是向PCF中寫入一個byte的資料,write_byte_data就是像PCF中寫入data。
有人就會問了,write_byte和write_byte_data有什麼區別?
還記得在PART1中強調的點嗎?每次資料傳輸一定是由「MASTER」主動開啟的,所以write_byte的目的是明確「MASTER」與哪個「SLAVER」對話,建立聯絡,並以一個「CONTROL byte」告知「SLAVER」如何工作,並不傳輸value。這也是為什麼程式碼中的第一步是bus.read_byte(0x48)
樹莓派主動開啟對話,與0x48地址對應的PCF8591建立聯絡,並通過一個CONTROL byte明確工作模式(Analog Input Mode)。
第二個問題來了,CONTROL byte是什麼?那不是個地址嗎?
這時候應該要想起PART2強調的內容(只有0x48是地址)。write_byte方法的第二個傳參是一個CONTROL byte。
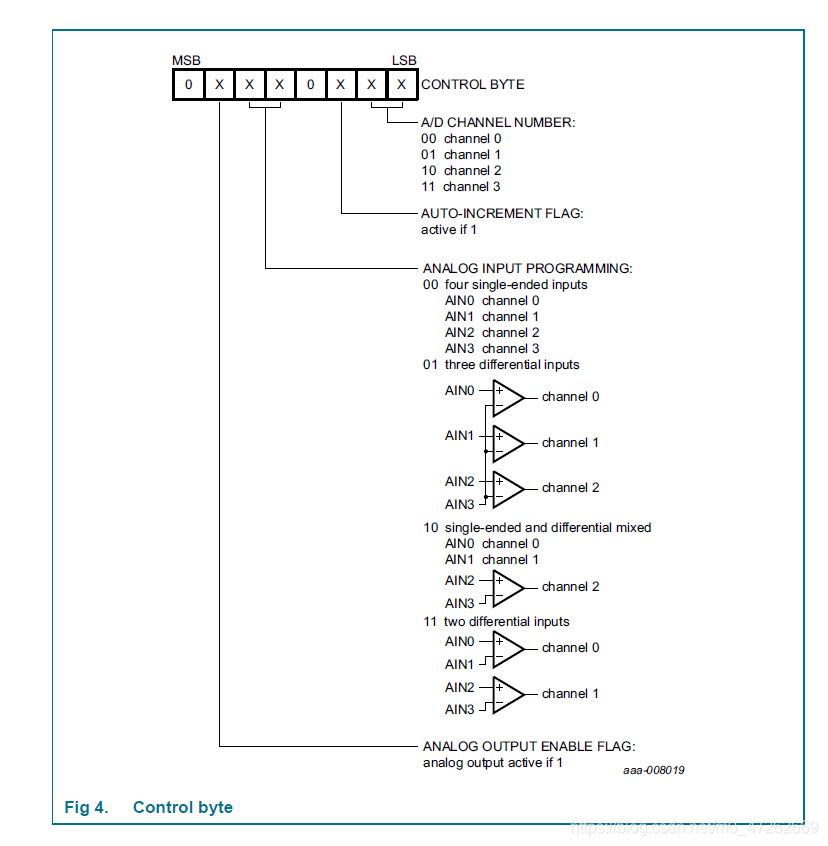
這是官方檔案對於CONTROL byte的解釋。8位元二進位制碼,其中第一位和第五位都是fixed number—0,可被編寫的部分是第二位——代表是否開啟AOUT輸出口,0表示不開啟,1表示開啟,只有該位是1的時候,DA才會工作,數位訊號被轉為模擬訊號從AOUT埠輸出;第三四位——代表四種不同的analog input mode,用以明確AIN埠與channel之間的資料關係。
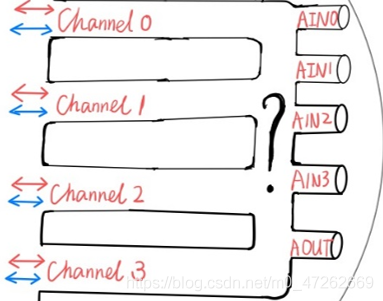
在第一幅圖中有一個大大的問號,analog input mode便是明確這個問號。有兩種對應關係:一種是single-ended,即一對一。例如在00模式下,從channel0中讀到的資料就是AIN0口輸入的模擬量經過AD轉換後的數位值,00模式的四個AIN埠都是分別一一對應於一個channel;在10模式下,AIN0和AIN1是一一對應channel0和channel1。另外一種對應關係是differential,即差分。例如在01模式下,channel0的值是AIN0與AIN3的差值;在10模式下,channel2的值是AIN2與AIN3的差值。
CONTROL byte的第七八位是AD channel number,用來控制從哪個channel讀取資料。第六位是auto-increment,值為1時,每次讀取資料都會自動切換channel,第一次讀channel0的資料,下一次讀到的就是channel1的資料,以此類推。
在Python程式碼中,CONTROL byte是一個十六進位制數,轉換為二進位制後就是八位二進位制。控制方法為:確定CONTROL byte中可編碼位上你想要的取值,得到一個八位二進位制數,轉為十六進位制數,輸入Python方法。
講到這裡後就幾乎結束了大部分的內容。繼續程式碼範例,read_byte,讀值過程不需要CONTROL byte,所以傳參只有ADDRESS。
可以看到,在真正讀取想要的num之前,還有一次空讀。這是因為PCF8591在接到讀取命令後,同時進行上一次的轉換資料的傳輸及本次的資料轉換,所以第一次空讀的資料是一個不確定的數,第一次的空讀只是為了啟動下一次正常的讀取。
bus.write_byte_data(0x48,0x42,160)
write_byte_data這個方法再多解釋一下,寫入的值會直接作為一個digital value,經過轉換後以電壓形式的模擬量從AOUT口輸出。我們使用的PCF8591是一個8bits的AD/DA轉換器,8bits的意思是AD/DA共有 2^8=256個刻度,所以傳輸的digital值範圍是0-255。舉個例子,你希望從AOUT口輸出一個3.13V的電壓給LED燈,應該寫入的值為3.13v/5v*255=160(這裡ADC接5v的基準電壓),但是實際上用電壓表測得此時LED燈兩端電壓為2.64v,與理想值有一定誤差。
五、Something More
我幾乎嘗試了所有的analog input mode,將麥克風接入不同的AIN口,選擇不同的channel,用示波器/電壓表+python畫出的圖進行了很多很多實驗,在差分模式下還是有很多難以解釋的試驗現象,但是基本可以肯定整個原理是沒有錯的。
補充一點,single-ended模式下,AD轉換的模擬量就是該AIN口與GND的電壓;differential模式下,AD轉換的模擬量則是兩個AIN口之間的電壓差,所以如果只使用一個AIN口且還想要用差分模式,那麼另一個AIN口要記著接地。
六、Learning Experience
本次超過30個小時的學習過程得到的經驗:
①永遠不要認為你之前的理解都是對的。發現整個理解過程出現錯誤,有時 候有必要推倒重建。
②網上資料參差不齊,錯誤百出,絕對不能盲目相信。
③實驗要清楚記錄條件及現象,不然會因為沒記清現象/條件而做很多次重複實驗。
④在學習一個全新的知識系統的過程中會有很多資訊湧入,往往在查詢資料解決問題1的時候會發現問題2,然後注意力轉移到問題2上,之後又會發現新的問題,進入一個死迴圈。所以需要適時停止,思考一下你是誰,你在哪兒,你要幹什麼。
⑤把問題記錄下來,然後接著探索。很有可能在第二天的時候你回看第一天的問題,會發出感嘆:我怎麼會問這麼愚蠢的問題。
⑥隊友很重要。討論/止損/提問/覆盤/總結。