機器人系統的能控性和能觀性(現代控制理論3)
對於前面提及的倒立擺小車或者自平衡機器人,在保持擺垂直的情形下,還在空間中自由運動嗎?
顯然是不行的,為什麼?想一個有趣的例子,類似這個,但是控制器換成人的腦袋啦,啥例子???
舉著一杯滿滿的水,我們還能健步如飛嗎?觀察水杯就無法看周圍環境,走路可能不穩;看周圍環境,嗯,水估計都灑到地上了吧^-^ ^_^ ^-^ ^_^
來看看這篇吧,能控和能觀,很有趣的……

機器人系統用執行器實現控制,用感測器完成觀測。主要分五個方面介紹:
先看看系統的控制?
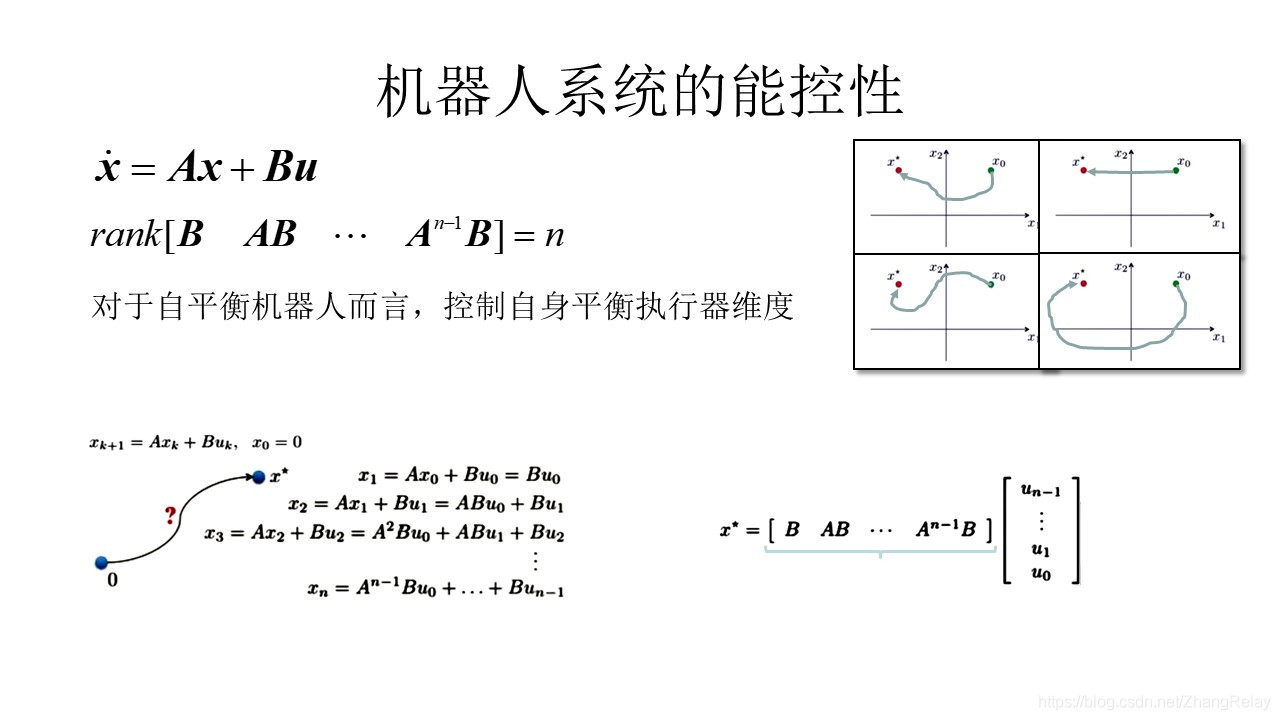
這個簡單,大部分都是直接背公式,其實理解起來也很容易的,系統的能控性只和狀態矩陣A和控制矩陣B,看左下圖示,對於機器人如果從位置0到x*,以離散系統為例,一步一步走起來,路就是需要一步步走的,這類系統未來與現在過去都有關聯的,不會穿越,x1->x2->x3到xn,如果能夠實現,一定是rank[B AB ……An-1B]=n嘛。
是否能從0到x*,是能控性給出的答案。如何從0到x*,軌跡如何,就和機器人系統結構和控制輸入密切相關了,不清楚,那你一定沒有看第二篇,類似右上圖示:

與能控性類似,能觀性只和C,A相關。為何在第一篇將自平衡機器人模型簡化了?自己用matlab算一下嘛。
需要掌握能控能觀判定程式碼的編寫哦。能控能觀與機器人運動控制正解逆解有沒有關聯呢?
知道這些,就可以改進機器人硬體設計哦
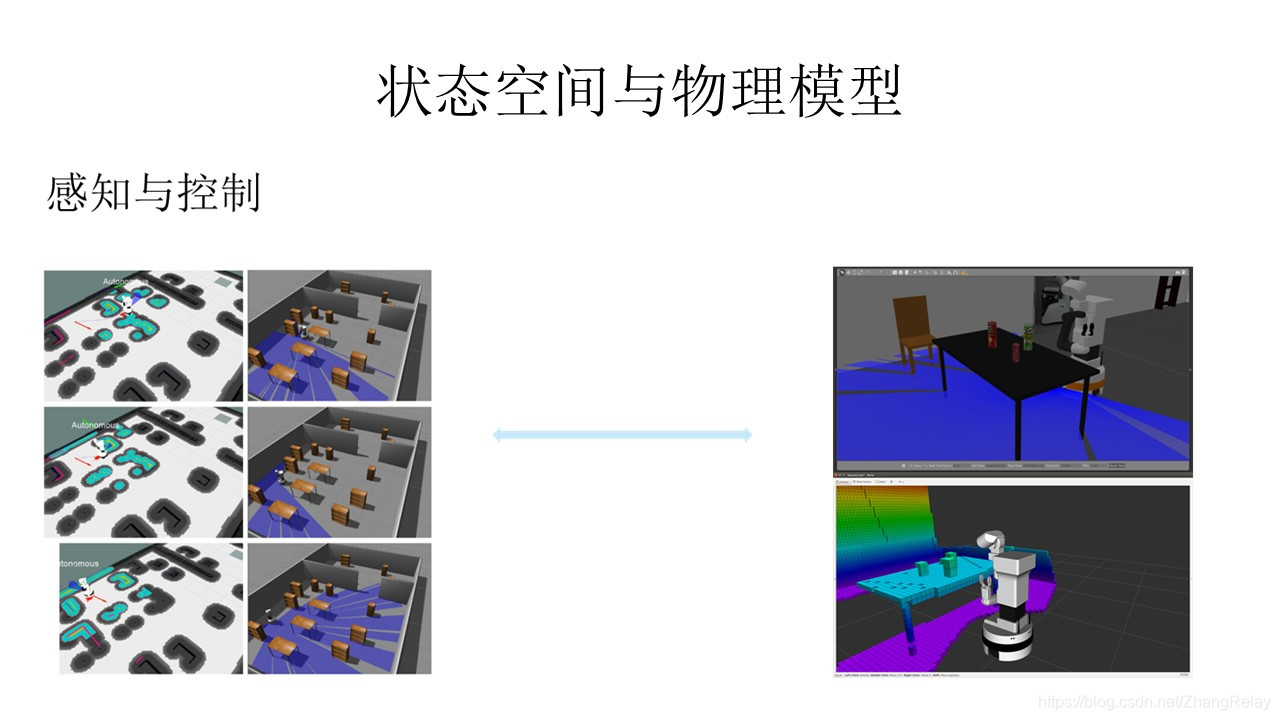
控制維度和感知維度要匹配,比如二維鐳射雷達可以提供二維環境下機器人導航;
但是三維深度視覺感測器提供的點雲資料才能給機器人抓取桌面上物體提供可靠的資訊,機械臂的控制維度也需要滿足在三維空間的自由運動。
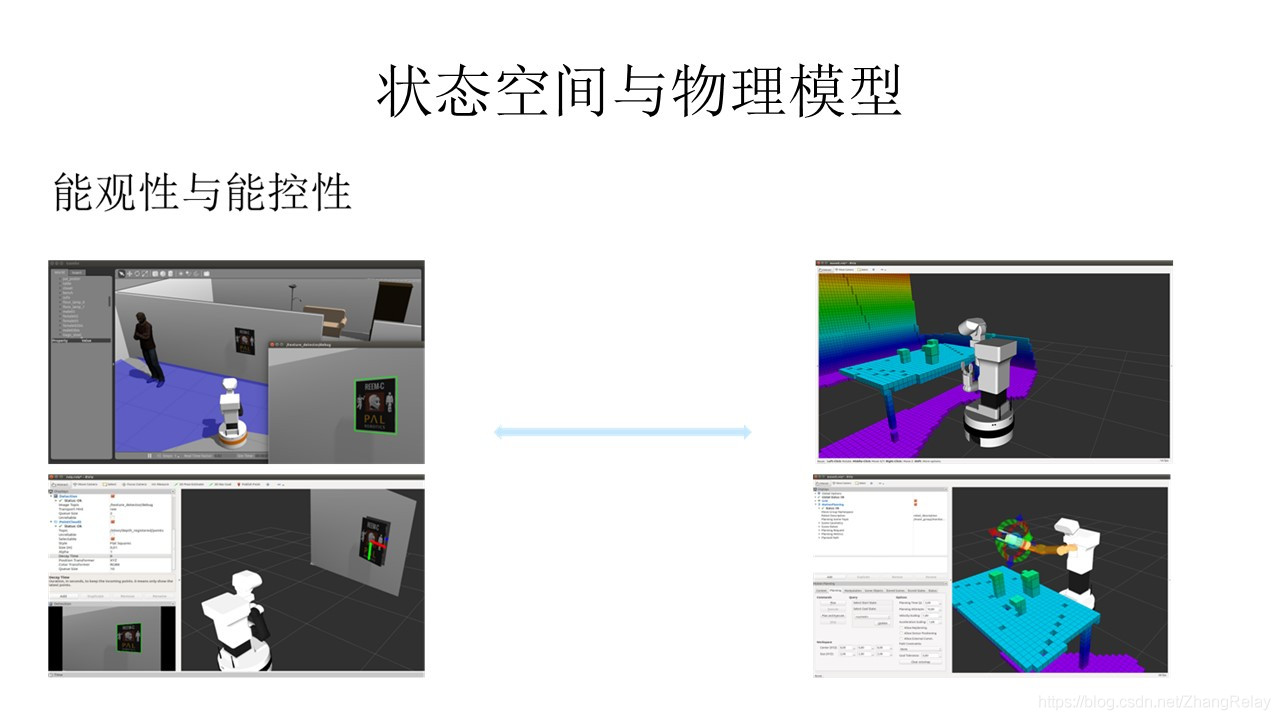
這些和能控能觀不謀而合,在設計機器人系統時,要充分考慮這些。

回到一開始提出的問題,既要控制擺垂直又要機器人自由運動,怎麼辦?給倒立擺加個直接控制它的電機吧……
當然這樣系統狀態空間模型也就全變了……
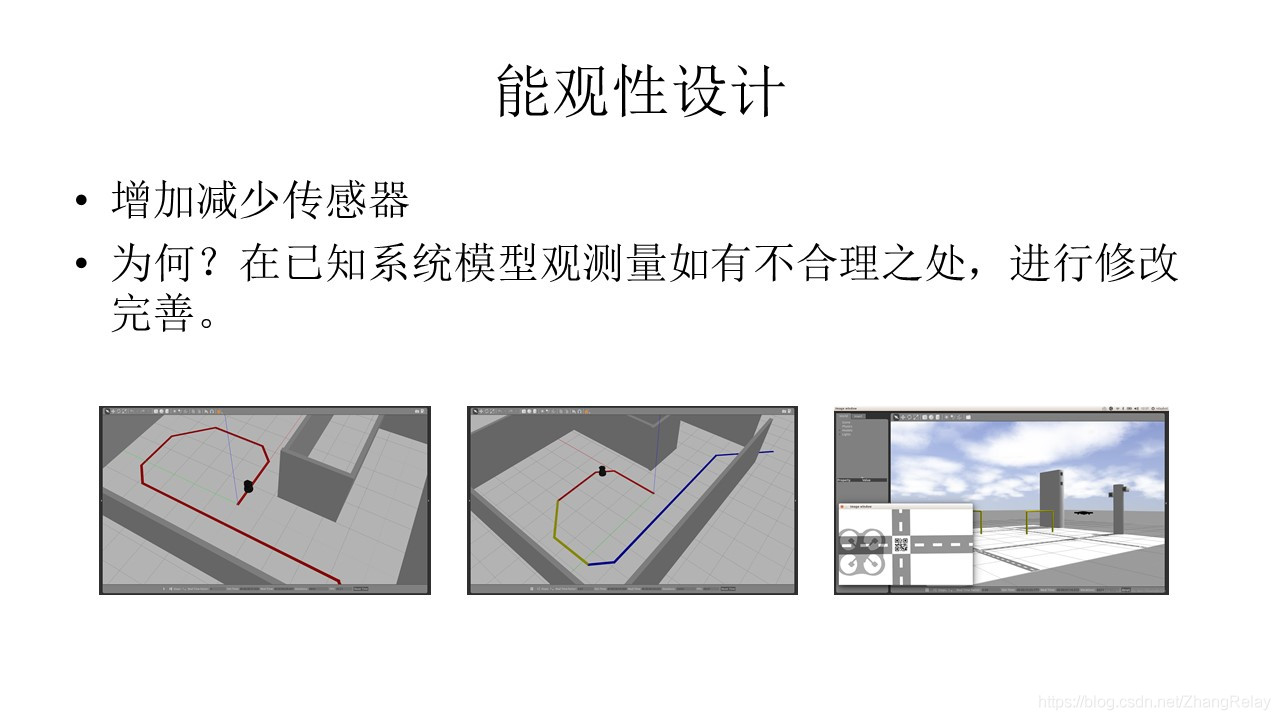
能觀性設計要考慮通用性,適當冗餘可以實現較好的觀測效能,比如三維感測器可以用於二維空間導航,反之不行,在設計機器人系統時,要充分考慮機器人的運動空間範圍,選擇合適的觀測感測器,有效反饋資料。
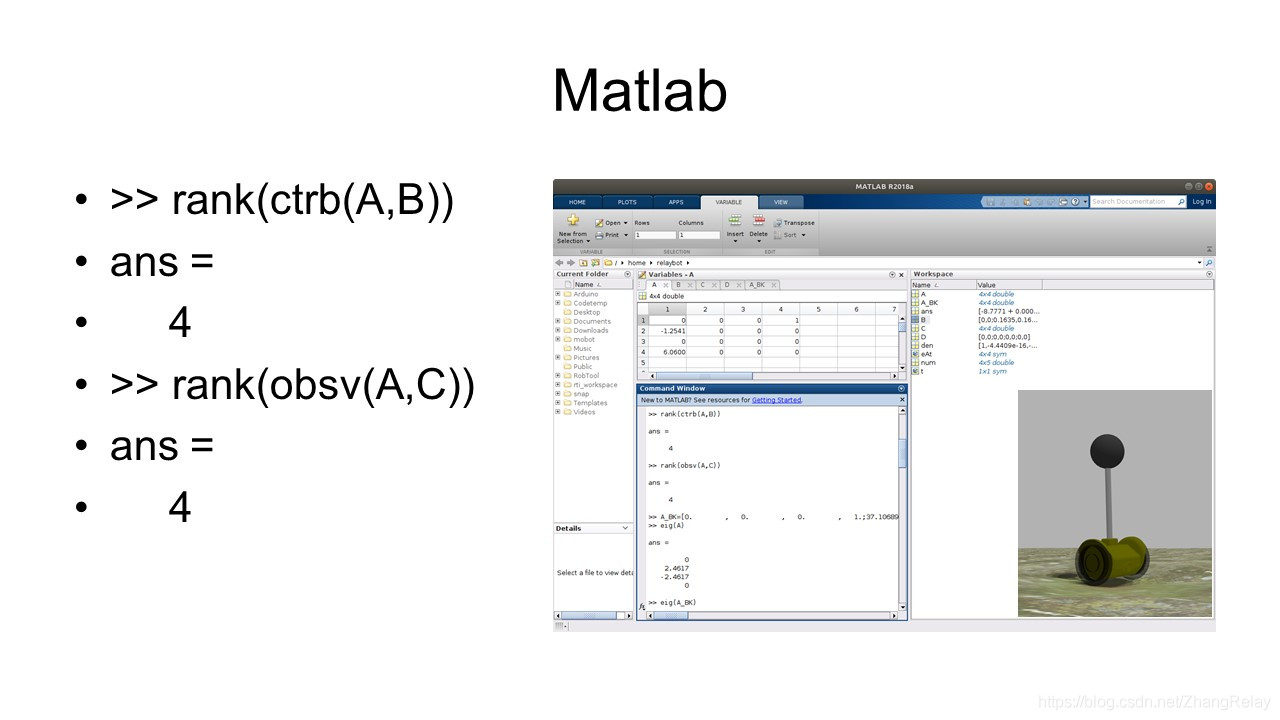
最後,將兩輪自平衡機器人能觀性和能控性用matlab程式算一下吧,嗯,都是4,完全能控完全能觀,太棒了!!!


