MSP340專案設計:2020年TI杯大學生電子設計競賽 坡道行駛電動小車(C題)循跡小車(分享專案展示視訊與原始碼)
嗶哩嗶哩專案展示視訊:https://www.bilibili.com/video/BV1oz4y1d7mH/
百度網路硬碟資料連結:https://pan.baidu.com/s/1PC-lkSORH_XCgIG-u3HCog
提取碼:c7zz
取走記得點贊啊!
題目要求
1.任務
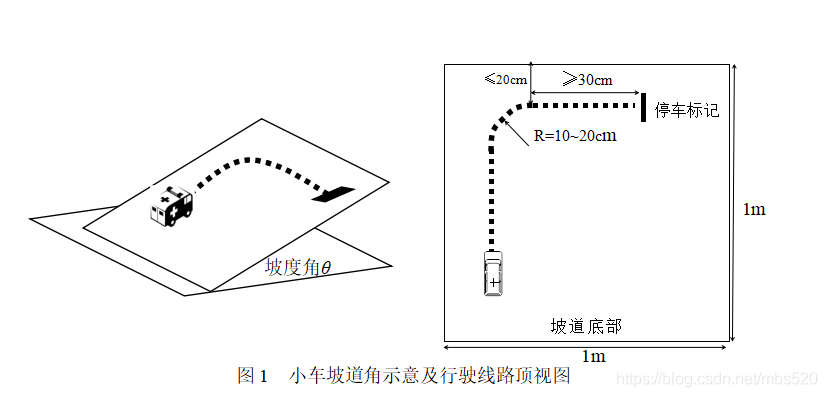
利用TI的MSP430/MSP432平臺,設計製作一個四輪電動小車。要求小車能沿著指定路線在坡道上自動循跡騎線行駛。小車必須獨立執行,車外不能使用任何裝置(包括電源)。小車(含電池)重量小於1.5kg,外形尺寸在地面投影不大於25cm×25cm。坡道用長、寬約1m的細木工板製作,允許板上有木質本色及自然木紋。木工板表面鋪設畫有1cm×1cm黑白間隔的紙條(以下簡稱為標記線)作為路線指示;標記線起始段為直線,平行於木板兩邊;標記線在坡頂轉向90°,轉彎半徑20cm;標記線平行坡頂距離≥30cm,距坡頂距離≤20cm;標記線總長度為1m。停車標記為寬1cm長5cm的黑色線條,垂直於坡頂標記線。小車坡度角示意及行駛線路頂檢視如圖1所示。
2.要求
(1)坡度角θ=0°,電動小車能夠沿標記線自動騎線行駛,在停車點停車;小車上標記點到停車標記中心線的垂直距離誤差≤2cm。停車時立即發出聲音提示。小車行駛過程中,其地面投影不得脫離標記線。 (15分)
(2)在完成(1)的基礎上,電動小車能夠設定行駛時間,自動控制小車勻速通過1米長的線路,在停車點停車。行駛時間可在10s~20s間設定。誤差絕對值≤1s。行駛過程中不得碾壓、脫離標記線。時間誤差每超過1s扣1分。 (20分)
(3)坡度角θ=10°,完成要求(2)的動作。 (20分)
(4)可任意指定坡度角θ在11°~30°,完成要求(2)的動作。 (20分)
(5)在完成(4)後,儘量增加坡度角θ,完成要求(2)動作。 (20分)
(6)其他。 (5分)
設計報告:
| 項 目 | 主要內容 | 滿分 |
| 方案論證 | 比較與選擇,方案描述 | 3 |
| 理論分析與計算 | 系統相關引數設計 | 5 |
| 電路與程式設計 | 系統組成,原理框圖與各部分的電路圖,系統軟體與流程圖 | 5 |
| 測試方案與測試結果 | 測試結果完整性,測試結果分析 | 5 |
| 設計報告結構及規範性 | 摘要,正文結構規範,圖表的完整與準確性。 | 2 |
| 總分 | 20 |
3.說明
(1)本題目必須使用指定的MSP430/MSP432平臺。並將該平臺置於顯著位置便於評測。不得另外使用其它CPU控制晶片。
(2)不得采用履帶小車及帶刺輪胎。小車輪胎採用橡膠塑料等柔性材質,不得在其表面塗抹粘性物質等。行駛路面不得鋪設除標記線外的任何材料。小車全程在木工板上行駛。
(3)小車設定模式後自動行駛,中途不得人工介入控制。在要求(2)~(5)的測試中,小車應勻速行駛。停頓、打滑、碾壓標記線每次扣除2分。
(4)小車標記點:小車到達停車線的標記點自定,並在行駛前明確標記在車體上,以便測量。
(5)所有測試中,行駛過程時間超過30s、小車投影脫離標記線或停車誤差超過2cm,均視為失敗。
(6)要求(5)中最大角度的測試,θ由選手自己選定。
(7)每項測試過程允許測試兩次,取最好成績。坡度角可以用安卓手機上的「指南針」APP軟體測量。
一、硬體設計
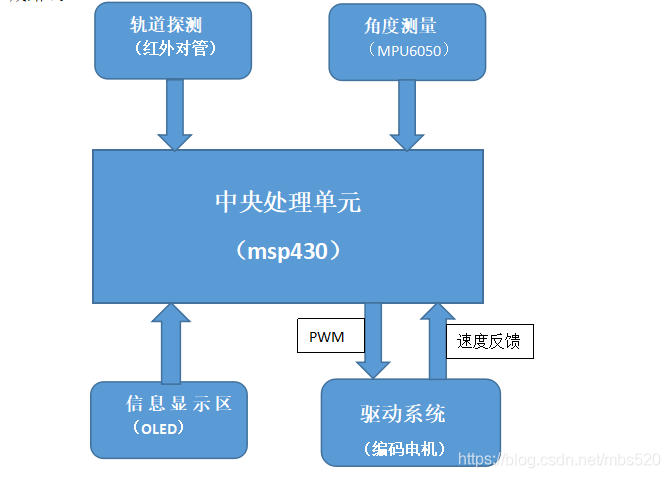
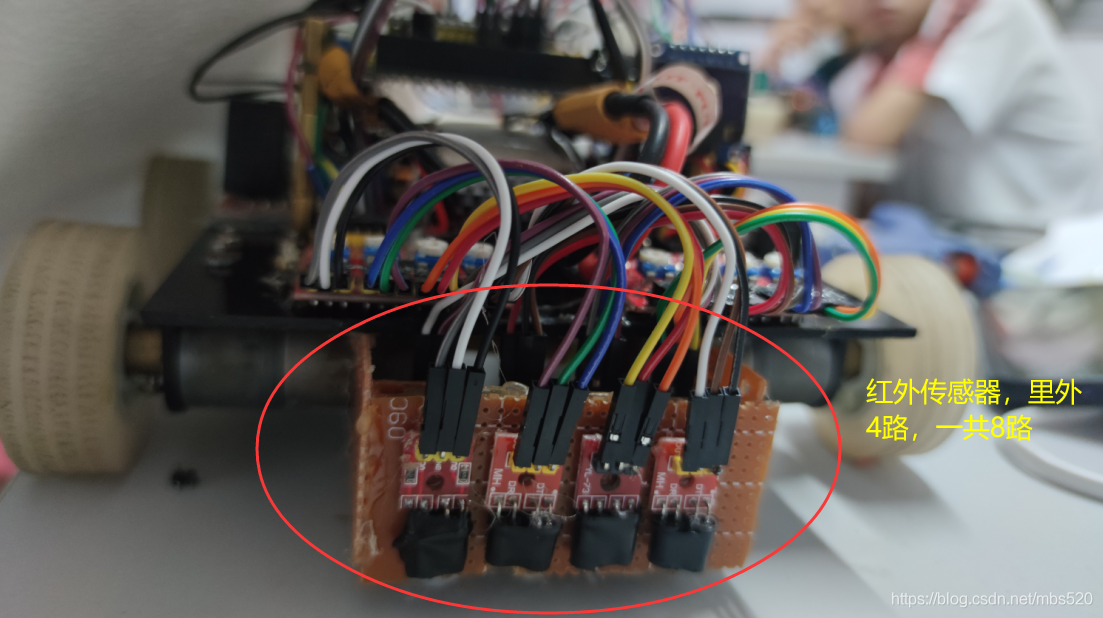
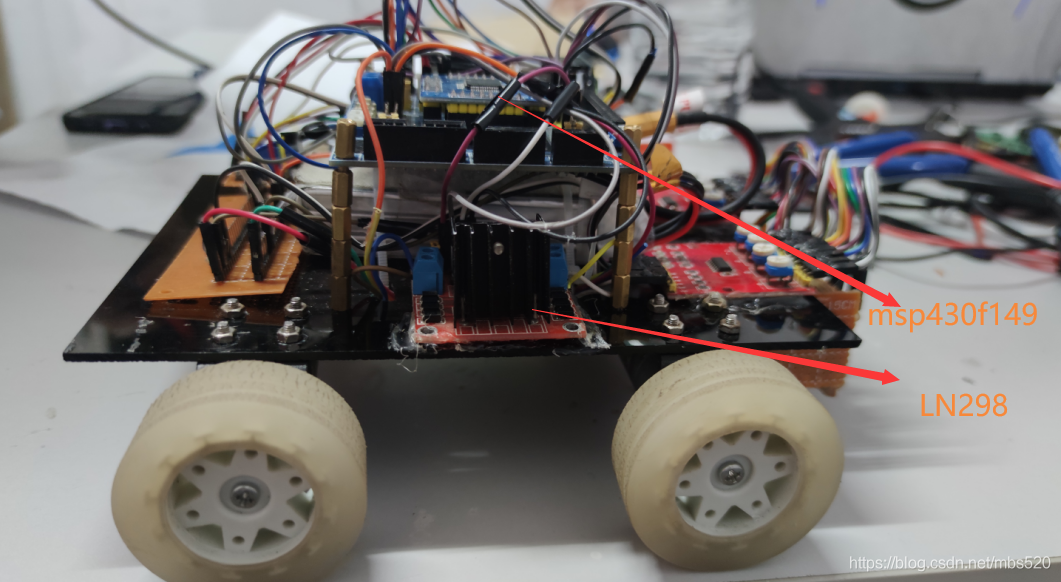
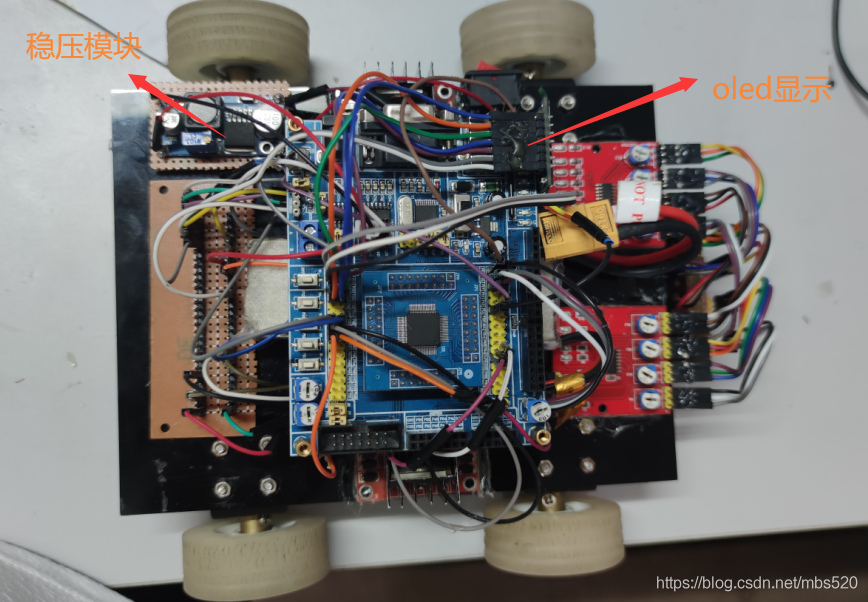
MSP430f149開發板作為電動小車的核心控制,對於小車的輪胎,我們選用的是橡膠輪胎,增大摩擦力,使小車爬坡能力更強,坡度更高的坡道也能穩定的行駛。對於小車在1cm×1cm黑白間隔的紙條上尋跡的問題,我們在車頭設計了兩排紅外對管,每排4個,這樣它可以更有效的沿著黑白紙條行駛,實現直行和轉彎以及停止的功能。使用7針的OLED來顯示小車行駛的路程、速度、時間等資料。使用低轉速的編碼電機,低轉速的電機更穩定,爬坡力氣更大利用msp430的PWM驅動,使用PID速度演演算法,編碼電機的霍爾感測器可以時刻將速度反饋給msp430晶片,達到精確控制電機的效果。
系統設計框圖:
(一)主控晶片選擇
根據題目要求,可以選擇MSP430微控制器或MSP432微控制器。對於控制系統的選擇,通過與組員以及導師的探討。
MSP430 : 1、經濟: 16位元MSP430微控制器(MCU)經濟實惠。
2、功耗: MSP430 微控制器可作為低功耗嵌入式裝置使用,其靜態電流可小於1微安。MSP430 系列微控制器的 CPU 的最高頻率為 25 MHz,但也可以降低頻率以降低功耗。MSP430 有6種不同的低功耗模式,在不同的模式下可以禁用不需要的時鐘或 CPU。此外,MSP430 還可在1微秒內被喚醒,這可使它在睡眠模式下可以維持更長的時間,讓其平均功耗最小化。
3、外設: 內部振盪器、定時器、PWM、看門狗、UART、SPI、I²C、10/12/14/16/24 位 ADC,以及掉電覆位電路等,外設非常齊全。
4、功能: MSP430 系列微控制器採用向量中斷,支援十多個中斷源,並可以任意巢狀。用中斷請求將 CPU 喚醒只要 6us,通過合理程式設計,既以降低系統功耗,又可以對外部事件請求作出快速響應。
基於上述考慮,MSP430價格相對於MSP432便宜許多,而且完全可以實現該題目小車的所有功能。所有我們選擇MSP430微控制器。
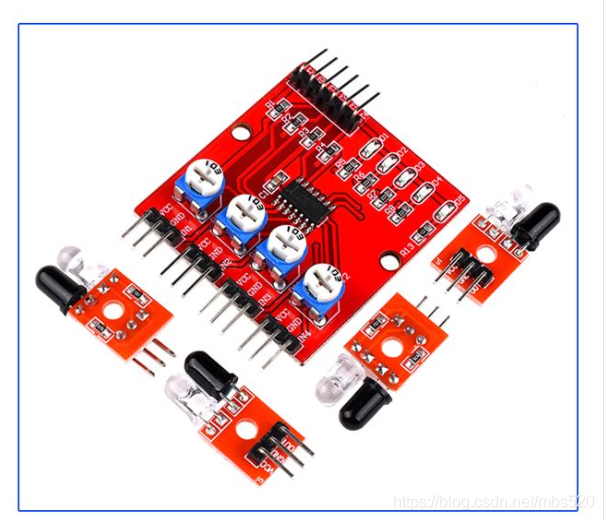
(一)紅外感測器設計
使用8路紅外對管反饋給晶片小車的路線情況,控制小車準確的行駛在軌道上和停車功能,到達停車線時控制蜂鳴器發出聲音。
整合式紅外探頭。可以採用整合斷續式光電開關探測器,它具有整合度高、工作效能可靠的優點,只須調節探頭上的一個旋鈕即可以控制探頭的靈敏度。此種探頭還能有效地防止普通光源(如日光燈等)的干擾。
(二)電機選擇
方案一:直流電機:起動和調速效能好,可以通過PWM調速,過載能力較強,受電磁干擾影響小;
方案二:編碼電機:起動和調速性好,PWM調速,過載能力較強,受電磁場干擾小;自身帶有編碼器,可以通過PID反饋給控制器電機的執行狀態。
基於上述考慮,為了提高時間、速度、以及停止位置的精度,所以我們採用方案二。
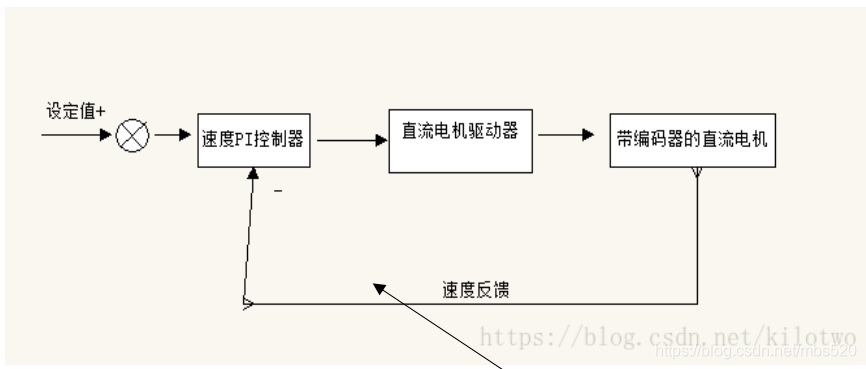
使用霍爾編碼電機實時檢測小車速度,使用PID負反饋調節速度保持上下坡速度也能保持勻速,控制小車在規定的時間內完成路線。

電機驅動採用298即可

(三)顯示屏模組選擇
方案一:採用LCD12864,尺寸做的比較大,可視角度低,工作溫度範圍較窄,工作壽命較短,重量比較大。
方案二:採用OLED,尺寸較小,可視角度好,工作溫度範圍比LCD12864寬一些,工作壽命長。
基於上述考慮,為了使小車外形更美觀,達到題目要求的重量,所以我們使用OLED。

(四)電源選擇
方案一:使用圓柱形充電電池組,這種電池容量比較小,電壓低,佔據空間大,重量較重,價格比較便宜。
方案二:使用12V聚合物鋰電池,這種電池容量大,電壓穩定,佔據空間相對較小,重量相對較輕,價格相對較貴。
基於上述考慮,為了使小車的電壓更加穩定,所以我使用12V聚合物鋰電池。

二、理論分析與計算
2.1 供電系統分析:
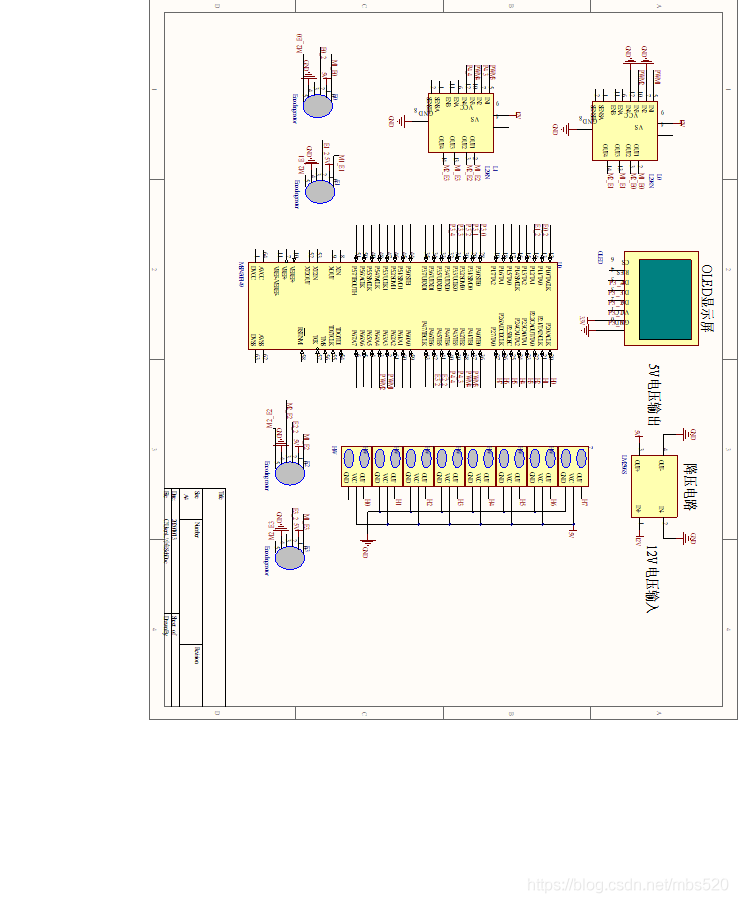
失敗例子,首先我們使用12V聚合物鋰電池給兩個電機驅動(L298N)供電,有L298N引出5V的電源輸入到MSP430微控制器,測了一段時間L298N被燒壞。後來經過一系列測試,最後發現,是因為微控制器、OLED、以及8路紅外的供電線路全都是L298N引出的5V電源,這樣導致電機驅動模組(L298N)電流過載,被燒壞。
優化方案,使用12V聚合物鋰電池給兩個電機驅動(L298N)供電,將12V電源再分一路給降壓模組(LM2596S)調節降壓模組上的電位器,使降壓模組的輸出電壓位5V,然後使用降壓模組降下來的電壓給微控制器、8路紅外、OLED等供電。經過反覆測試,這樣的供電系統沒有任何問題。
2.2 PID計算速度
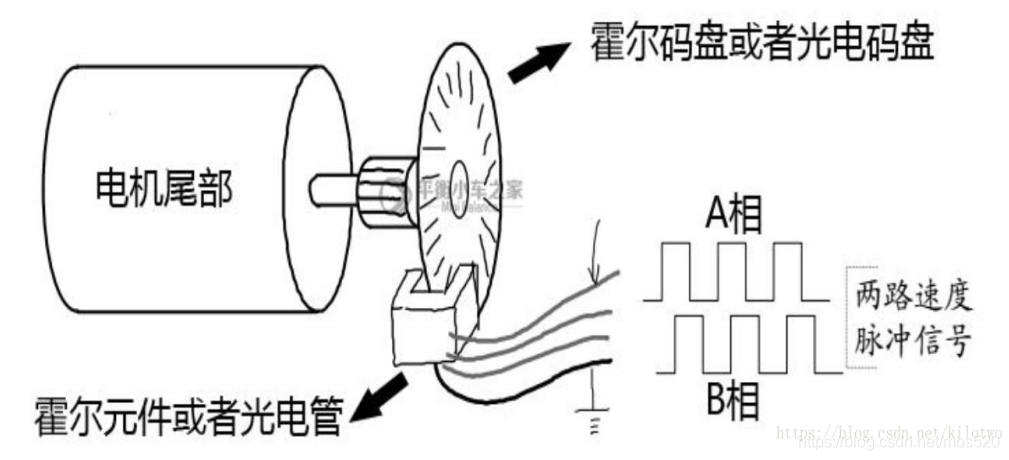
編碼器是一種將角位移或者角速度轉換成一連串電數位脈衝的旋轉式感測器,我們可以通過編碼器測量到底位移或者速度資訊。編碼器從輸出資料型別上分,可以分為增量式編碼器和絕對式編碼器。
從編碼器檢測原理上來分,還可以分為光學式、磁式、感應式、電容式。常見的是光電編碼器(光學式)和霍爾編碼器(磁式)。
這裡使用增量式輸出的霍爾編碼器。編碼器有 AB 相輸出,所以不僅可以測速,還可以辨別轉向。根據上圖的接線說明可以看到,我們只需給編碼器電源5V 供電,在電機轉動的時候即可通過 AB 相輸出方波訊號。編碼器自帶了上拉電阻,所以無需外部上拉,可以直接連線到微控制器IO讀取。
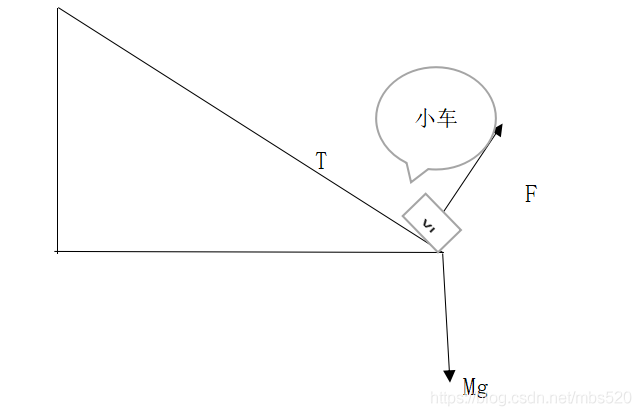
2.3 小車爬坡受力分析與計算
根據理想情況條件,忽略空氣阻力。設小車的品質為m,重力加速度為g,系統的初始時刻t=0,與斜坡形成的角度為,在標記線的初始位置為座標原點建立直角座標系,水平方向為x軸方向。如下圖所示:
三、電路與程式設計
(一)系統組成
組成電動小車的系統分為以下幾個部分:
1)MSP430F149開發板
2)8路紅外對管
3)兩個電機驅動模組(L298N)
4)12V聚合物鋰電池
5)降壓模組(LM2596S)
6)4路編碼電機
7)小車框架
(二)原理框圖與各部分的電路圖
(三)程式設計
由於程式碼過長只展示部分程式
/*------------------
//專案:坡道行駛電動小車,尋跡小車
//作者:化作塵
//時間:2020年10月13日17點51分
//版本:v1.0
//郵箱:2809786963@qq.com
//csdn: 化作塵
//bilibili: 化作塵my
--------------------*/
#include "msp430.h"
#include "car.c"
#include "oled.h"
#include "oled.c"
#include "oledfont.h"
#include "gpio.h"
double X_1,X_2,X_3,X_4,V_1,V_2,V_3,V_4;//mm ms
double x1,x2,x3,x4,s1,s2,s3,s4;
char flag=0;
uchar data=0;
int n=0;
int va=15,vr=0;
int time=10;
int go = 0;
#include "PID.h"
void PIDOUT_qian();
void PIDOUT_hou();
void PIDOUT_zuo();
void PIDOUT_you();
void display();
void UART_Init();
void Send_Byte(unsigned char);
void Print_Str(unsigned char*);
void Set_temp(float ,float ,float, float);
void PIDOUT_left();
void PIDOUT_right();
void Tim_init();
void interrupt(void);
void main(void)
{
Sysclk_init();//系統時鐘初始化
Tim_init();//定時器捕獲與pwm初始化
interrupt();//外部中斷 初始化
OLED_Init();//初始化OLED
IO_init();//電機初始化
P3DIR |= BIT5;//初始化蜂鳴器
P3OUT &= ~BIT5;
OLED_Clear();//清屏函數
//OLED_ShowCHinese(0,0,0);//顯示漢字 x y 第幾個漢字
OLED_ShowString(4,4,"speed: ");//速度
OLED_ShowString(4,6,"dista: ");//
//等待go按鍵按下
while(!go)
{
display();//oled顯示
}va = 150/time;
while(1)
{
display(); //顯示
PID_calc();//PID計算
//自動循跡實現
if((vr == 0) || (vr == 50/time) || ((vr == -50/time) || (vr == 150/time)))//如果是左3個感測器
{
PIDOUT_qian();//pwm輸出
Set_temp(va-vr,va-vr,va+vr,va+vr);//設定速度
}
else if(vr == -150/time)//如果是右感測器
{
PIDOUT_zuo();//pwm輸出
Set_temp(va-vr,va-vr,3,6);//設定速度
}
if(go == 0)//中斷髮生停止訊號
{
P3OUT |= BIT5;delayms(600);//蜂鳴器
P3OUT &=~ BIT5;delayms(600);
P3OUT |= BIT5;delayms(600);
P3OUT &=~ BIT5;delayms(600);
P3OUT |= BIT5;delayms(600);
P3OUT &=~ BIT5;delayms(600);
while(1);//停止
}
}
}
四、測試方案與測試結果
4.1測試條件及儀器
測試條件:檢查多次,類比電路和硬體電路與系統原理圖完全相同,並且檢查無誤,硬體電路保證無虛焊。
測試儀器:電動小車,木板。
4.2測試方案及結果分析
表5: 動力小車坡度測試
| 次數 | 最大誤差(cm)/(度) | 最小誤差(cm) | 平均誤差(cm) | |
| 0度 | 10 | 1 | 0 | 0.5 |
| 0~30度 | 10 | 2 | 0 | 1 |
| 40度 | 10 | 2 | 1 | 1.5 |
綜上所述,對系統各部分進行校準和精密處理後,。系統精度和穩定性都有很大的提高。結合上述測試資料,系統完全符合要求,誤差在允許範圍內,實現全部功能,有些指標還很高精度。由此可以得出以下結論:本設計達到設計要求。
五、專案展示
(一)硬體展示
嗶哩嗶哩專案展示視訊:https://www.bilibili.com/video/BV1oz4y1d7mH/