基於python的opencv影象處理實現對斑馬線的檢測(最簡單的方法!!!幾十行程式碼搞定!!!)
2020-10-13 11:00:24
基本思路
斑馬線檢測通過opencv影象處理來進行灰度值轉換、高斯濾波去噪、閾值處理、腐蝕和膨脹後對影象進行輪廓檢測,通過判斷車輛和行人的位置,以及他們之間的距離資訊,當車速到超過一定閾值時並且與行人距離較近時,則會被判定車輛為未禮讓行人。
結果範例
實驗流程
先通過視訊擷取一張圖片來進行測試,如果結果滿意之後再巢狀到視訊中,從而達到想要的效果。
1.預處理(灰度值轉換、高斯濾波去噪、閾值處理、腐蝕和膨脹)> 根據自己的需求來修改一些值
#灰度值轉換
imgGray = cv2.cvtColor(copy_img,cv2.COLOR_BGR2GRAY)
#高斯濾波去噪
imgBlur = cv2.GaussianBlur(imgGray,(5,5),0)
#閾值處理
ret,thresh = cv2.threshold(imgBlur,127,255,cv2.THRESH_BINARY)
#腐蝕
imgEro = cv2.erode(thresh,kernel1,iterations=2)
#膨脹
imgDia = cv2.dilate(imgEro,kernel2,iterations=4)
預處理之後(如下圖所示):

2.輪廓檢測
#輪廓檢測
_,contouts,hie = cv2.findContours(imgDia,cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE)
cnt = contouts
cv2.drawContours(copy_img, cnt, -1, (0, 255, 0), 2)
全部的輪廓(如下圖所示)

可以看到這並不是我們想要的,所以我們需要判斷一下位置,選取我們感興趣的區域。
3.感興趣區域
根據自己圖片或視訊的需求來更改x,y,w,h位置資訊數值。
for i in cnt:
#座標賦值
x,y,w,h = cv2.boundingRect(i)
#roi位置判斷
if y>350 and y<450 and x<1200 and w>50 and h>10:
# 畫出輪廓
cv2.drawContours(copy_img, i, -1, (0, 255, 0), 2)
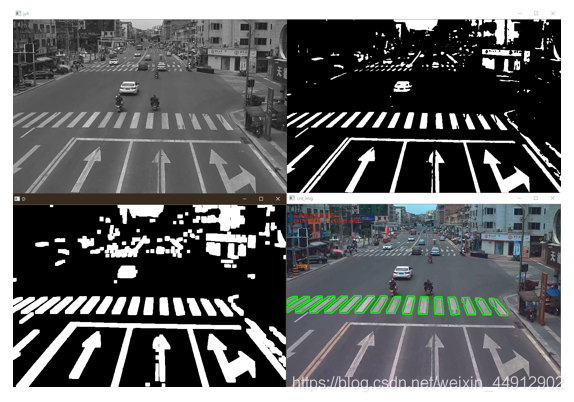
獲取roi後完整結果(如下圖所示)

4.完整程式碼
import cv2
import numpy as np
#定義兩個核 (kernel_Ero用於腐蝕,kernel_Dia用於膨脹)
kernel_Ero = np.ones((3,1),np.uint8)
kernel_Dia = np.ones((3,5),np.uint8)
img = cv2.imread("../images/bmx.png")
copy_img = img.copy()
#原圖copy修改尺寸
copy_img = cv2.resize(copy_img,(1600,800))
#灰度值轉換
imgGray = cv2.cvtColor(copy_img,cv2.COLOR_BGR2GRAY)
#高斯濾波去噪
imgBlur = cv2.GaussianBlur(imgGray,(5,5),0)
#閾值處理
ret,thresh = cv2.threshold(imgBlur,127,255,cv2.THRESH_BINARY)
#腐蝕
imgEro = cv2.erode(thresh,kernel_Ero,iterations=2)
#膨脹
imgDia = cv2.dilate(imgEro,kernel_Dia,iterations=4)
#輪廓檢測
_,contouts,hie = cv2.findContours(imgDia,cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE)
cnt = contouts
for i in cnt:
#座標賦值
x,y,w,h = cv2.boundingRect(i)
#roi位置判斷
if y>350 and y<450 and x<1200 and w>50 and h>10:
# 畫出輪廓
cv2.drawContours(copy_img, i, -1, (0, 255, 0), 2)
cv2.imshow("img",copy_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
總結
在業務需求中這種流程做出來的結果並不可行,只不過是把想要的東西框了出來,但是如果想要對交通場景判別機動車是否禮讓行人行為的話則需要對座標進行判斷,可以通過從第一個斑馬線的座標到最後一個斑馬線的座標(橫向)來畫出一個大的矩形框(roi區域),然後根據這個矩形框的座標來對機動車(已有座標)座標來進行行為判斷,從而達到需求。
最後!!!
第一次接觸opencv!所以請各位視覺領域的大佬們勿噴我這個小菜雞!(/狗頭)
程式碼量非常少,無泛化能力,很low的一種做法。。。不過對於小白的我來說學習opencv還是很有幫助滴!幹就完了!奧利給!