鎖相環三個引數分析
這個需要在你原來的模組上,加入一個分頻器,使得輸出頻率小於35MHz即可。
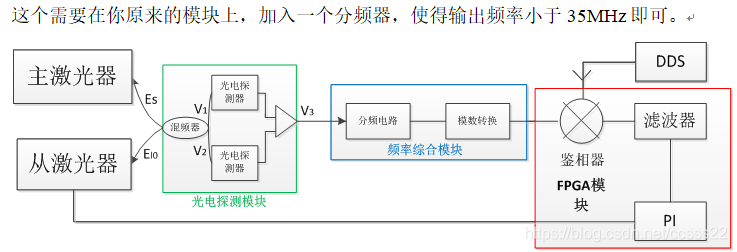
按這個結構中的藍色框圖進行建模。
- 最後兩鐳射器輸出頻率穩定值為100MHz。
我這裡對輸出的兩個鐳射的資料做了FFT分析,分析表明,都調整的為100MHz了,
- 下側鐳射器輸出的調諧係數為60MHz/mA;可調諧
這個就是修改K0的值即可。已在原來的模型中修改了。
- 提供傳遞函數與PID引數兩種表達形式的函數,以及設計思路,方便自己偵錯。
傳遞函數推導如下:
傳遞函數的,這裡等效為環路濾波器,
首先看環路濾波器的基本原理,
根據論文基本原理,其等效的傳遞函數為:
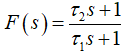
那麼,這裡就是計算兩個引數tao1和tao2了,
根據論文的原理可知,引數的計算方式如所示:
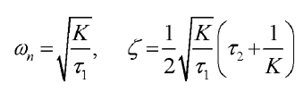
然後,在工程上,對於這兩個引數,一般直接採用嘗試的方式,來擇優運算元,因為上述公式中的引數實際和理論相差較大的,理論計算的值,實際也不會不太一樣,
這裡經過測試,選擇的引數為:
PID 控制器由比例單元( P )、積分單元( I )和微分單元( D )組成。其輸入 e (t) 與輸出 u (t) 的關係為公式3.1:
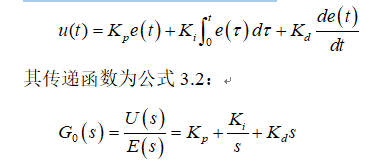
其中為比例調節係數,其主要作用是按比例反應系統的偏差,系統一旦出現了偏差,比例調節立即產生調節作用用以減少偏差。比例係數大,可以加快調節,減少誤差,但是過大的比例,使系統的穩定性下降,甚至造成系統的不穩定。
其中為積分調節係數,其主要作用是使系統消除穩態誤差,提高無差度。因為有誤差,積分調節就進行,直至無差,積分調節停止,積分調節輸出一個常值。積分作用的強弱取決與積分時間常數Ti,Ti越小,積分作用就越強。反之Ti大則積分作用弱,加入積分調節可使系統穩定性下降,動態響應變慢。積分作用常與另兩種調節規律結合,組成PI調節器或PID調節器。
其中為微分調節係數,其主要作用是反映系統偏差訊號的變化率,具有預見性,能預見偏差變化的趨勢,因此能產生超前的控制作用,在偏差還沒有形成之前,已被微分調節
作用消除。因此,可以改善系統的動態效能。在微分時間選擇合適情況下,可以減少超調,減少調節時間。微分作用對噪聲干擾有放大作用,因此過強的加微分調節,對系統抗干擾不利。此外,微分反應的是變化率,而當輸入沒有變化時,微分作用輸出為零。微分作用不能單獨使用,需要與另外兩種調節規律相結合,組成PD或PID控制器。