2020電賽C題—ADS1292R心電圖檢測儀
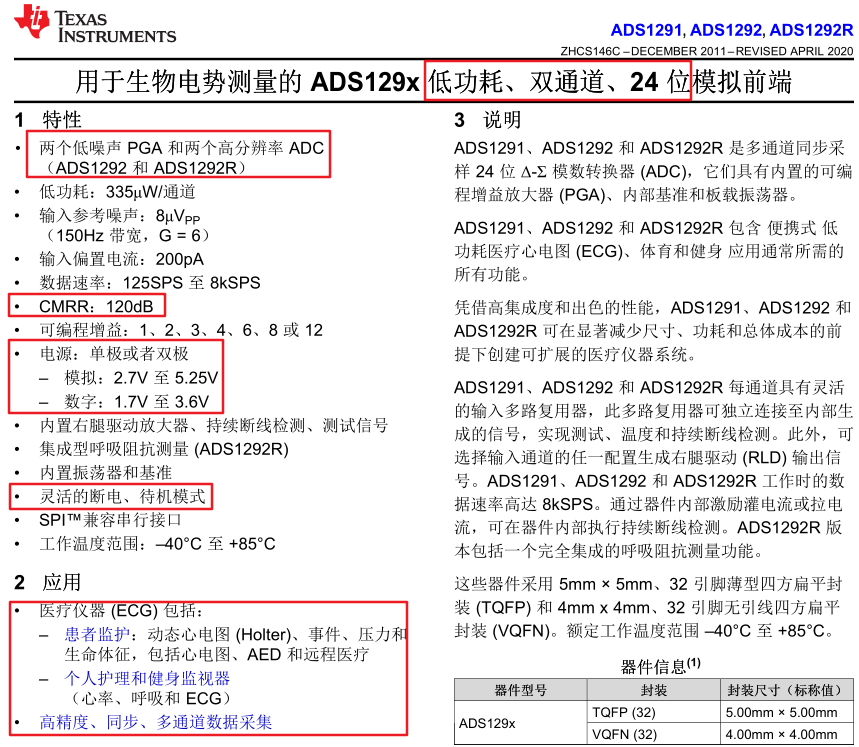
摘要:ADS1292R是TI公司早在2012年就出產的一款醫用級ADC晶片,它主要應用在醫療儀器(心電圖ECG),可以監護患者以及和人護理和健身監視器。ADS1292R具有兩個低噪聲可程式化增益放大器(PGA)和和兩個高分別率模數轉換器器(ADC),整合了心電採集所需要的部件,方便裝置小型化。它的功耗極低,使得可以作為長時間監控成為可能。而且輸入參考噪音低,共模抑制比高。足以進行心電採集。電賽很可能會讓大家利用這款晶片做一個心電圖檢測儀,顯示模組很可能就是大家所熟知的RGB大螢幕,同時這道題應該是訊號題了。
心電訊號和呼吸訊號是人體的重要生物電訊號。尤其是心電訊號,它比其他生物電訊號更直觀,更具有規律性,它是反映心臟健康狀況的重要依據。心電圖是診斷和分析治療心血管疾病的一個重要手段,在臨床治療中心電圖得到廣泛應用。但是常規心電圖一般需要通過大型醫療場所,如醫院、療養院的心電圖機採集資料獲得,其獲得途徑較難、價格較高、耗時長等弊端阻礙了心電圖機的進一步應用。今年大家經歷了新冠疫情,所以出這種題目也是情理當中,畢竟學以致用,學了不能用,那學了又有何用?對吧。
1、引腳功能及設定
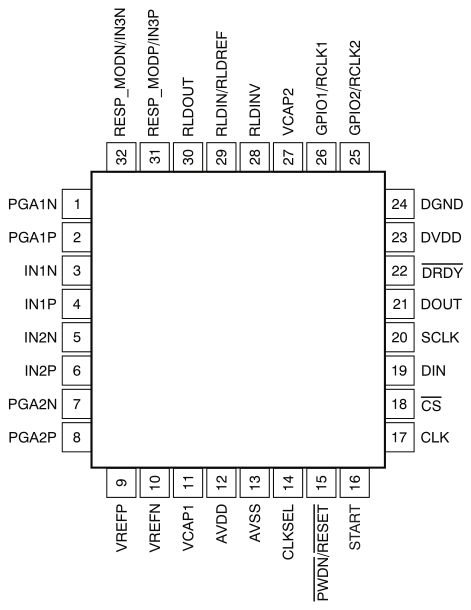
這可晶片的引腳還不少,一共有32個引腳。當然做電賽大家肯定都是買的幾百塊錢的模組,肯定不會自己親自動手焊接,而且買的模組只會把晶片所需要的通訊引腳和電源引腳引出來。所以做硬體的也就節省了很多時間。當然節省的時間不是讓你去休息的。你需要花大量的時間來研究資料手冊,把外圍電路優化好才能讓軟體更好地去寫程式碼。
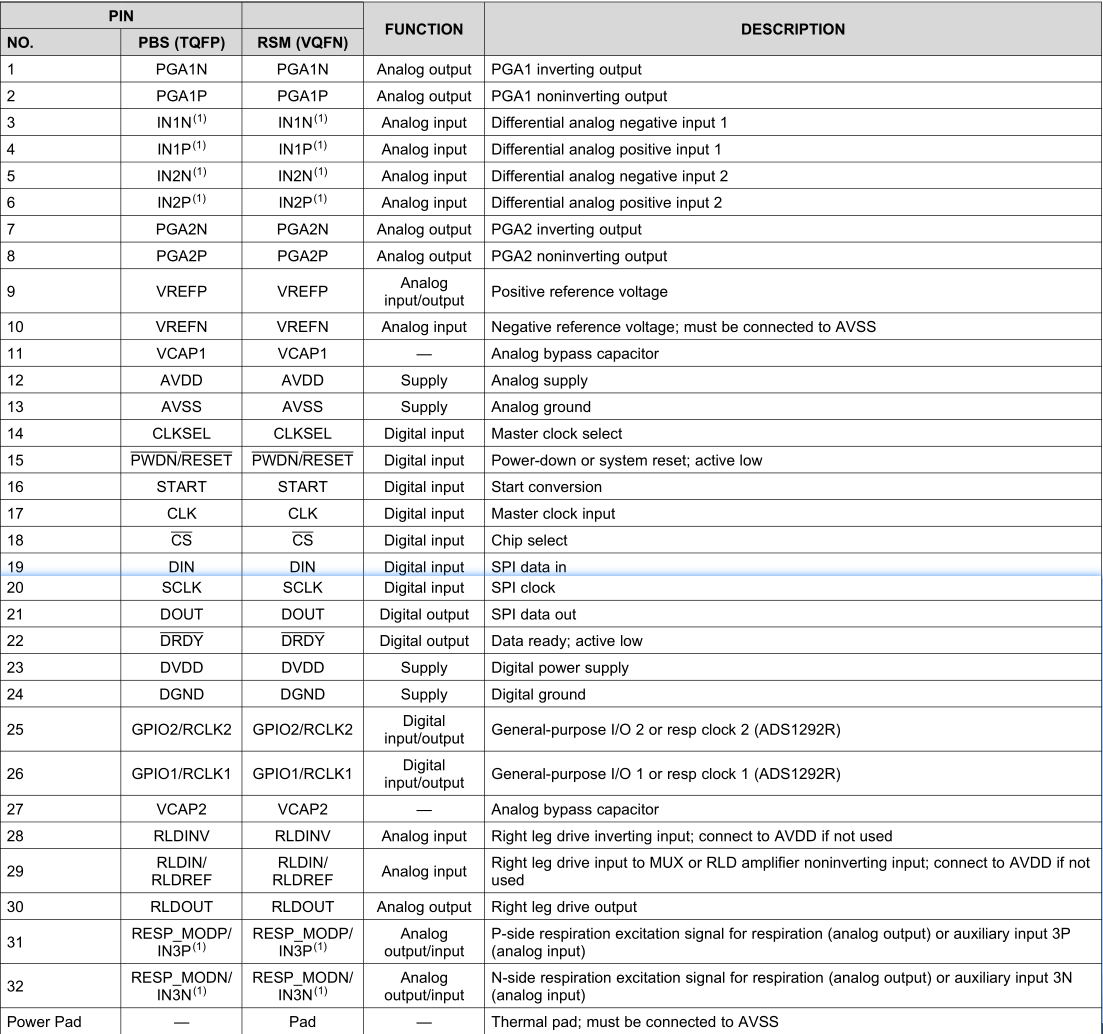
這裡我簡單的看一下資料手冊,可能分析的不對,需要各位大顯身手去開動你們聰明的大腦了。我們從1號到32號引腳講講它的引腳功能:
- 1號和2號引腳PGA1N/PGA1P是PGA的輸出引腳。
- 3號和4號引腳IN1N/IN1P這是一對模擬輸入,這裡用的是差分輸入以減小共模干擾,在它們輸入到MUX之前,還經過了EMI濾波器。
- 5號和6號引腳 IN2P/IN2N和3號和4號引腳同樣是一對模擬輸入,差分輸入以減小共模干擾。
- 7號和8號引腳PGA2N/PGA2P和上面的1號和2號引腳對應,是PGA的輸出引腳。
- 9號和10號引腳VREFP和VREFN分別是同相和反相反饋電壓。
- 11號和27號引腳VCAP1和VCAP2是旁路電容,作用是吸收器件的交流成分(紋波常常被認為是交流成分)
- 12號AVDD是模擬電源.
- 13號AVSS是模擬地。
- 14號CLKSEL引腳和暫存器中時鐘管理的部分共同控制了外部或者內部時鐘的選擇,以及時鐘是否從17號引腳CLK引腳輸出。
- 15號PWDN/RESET是低有效的復位功能。
- 16號START使能引腳。
- 18號到21號四個引腳CS SCLK DIN DOUT 是標準的SPI通訊協定。
- 22號引腳DRDY低有效的資料傳輸準備完成標誌訊號。
- 23號引腳DVDD數位電源。
- 24號引腳DGND數位地。
- 25號和26號引腳GPIO1和GPIO2是設定暫存器的引腳。
- 28號和引腳RLDINV是右腿驅動的反向輸入端,不用的時候連到模擬地上。
- 29號和引腳RLDIN/RLDREF是右腿驅動電路對MUX的輸入,或者右腿驅動電路的非逆變輸入,不用的時候必須接到模擬地AVSS上。
- 30號和引腳RLDOUT 右腿驅動輸出。
- 31號和32號引腳RESP_MODP/IN3P RESP_MODN/IN3N 這一對引腳有兩個功能:第一是作為呼吸的激勵訊號(模擬輸出);第二個作用是輔助的模擬差分輸入,可以被MUX複用到任何一路PGA上。
注意:
- RLD 開頭的引腳,RLD是「右腿驅動電路」,是醫療電子中一個常見的概念。因為醫療電子實際上是採集人體固定位置間的生物電壓,在它的量級,人體本身作為天線接收的家庭用電電器等的輻射產生的電壓就是一個不可忽略的噪聲了,所以這時候我們需要想辦法抑制這個共模電壓:
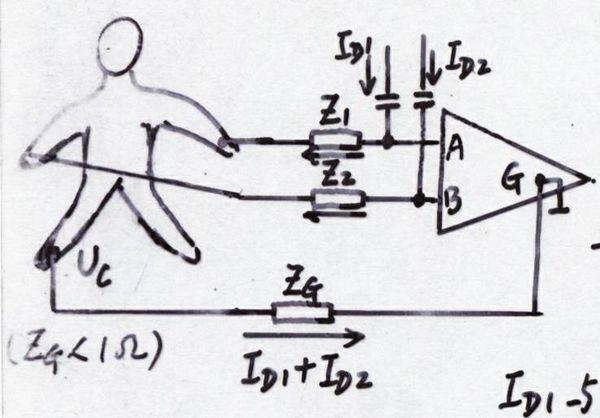
- 什麼是PGA? PGA是「可程式化增益放大器」 ,可以作為前端減小高速ADC的噪聲,其原理就是使用PGA提供的高增益下,訊雜比提升,這樣就總的降低了噪聲。
2、訊號採集的硬體要求
心電及呼吸訊號採集前端是整個監護系統的核心部分,如果前端訊號採集部分的電路出現問題,即使你的模組板子再好也不能得到你想要的輸入訊號,自然就GG。ECG 屬於微弱的小訊號,其幅值在 10μ V~5mV 之間,極易受到干擾,導致有用訊號淹沒在諸多噪聲中。為了能有效地提取出有用訊號,對訊號採集硬體提出如下要求:
- (1)高輸入阻抗
人體阻抗高達幾 KΩ 至幾十 KΩ,可以將人體看成是高阻抗的弱訊號輸出源。人體本身、衣著和環境等的不同會引起人體阻抗很大的變化,為了防止人體阻抗的波動引起監護系統訊號的不穩定,訊號採集硬體應具有較高的輸入阻抗。同時,硬體採集電路的輸入阻抗也不宜過高,否則會引入較強的外界干擾。那這時你的硬體手就應該好好利用運算放大器來設計電路。 - (2)高共模抑制比CMRR
心電訊號受到的最大幹擾是 50Hz 的工頻干擾,它以共模的形式載入到每一個電極上,形成共模干擾。因此心電採集電路應具有很高的共模抑制比,一般要求在 60~80dB。
這兩點是前端設計電路最重要的兩點。
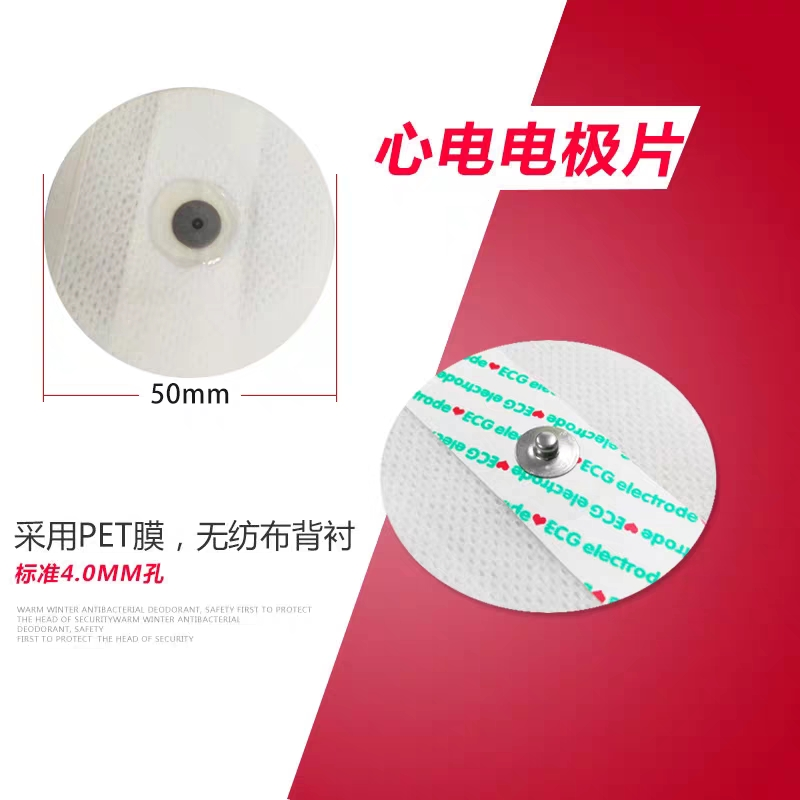
3、電極片的選擇
極片也是感測器的一種,其作用是將人體內的離子導電的位移電流轉化為檢測電路中的電子導電的傳導電流,電極片作為檢測電路輸入前端,其效能也影響著檢測電路的噪聲、共模抑制比等,所以選擇合適的電極片對整個系統的訊號品質尤為重要。既然是比賽那就用學校的錢買最好的點電極片了,戰術後仰!!!

4、測量的電路
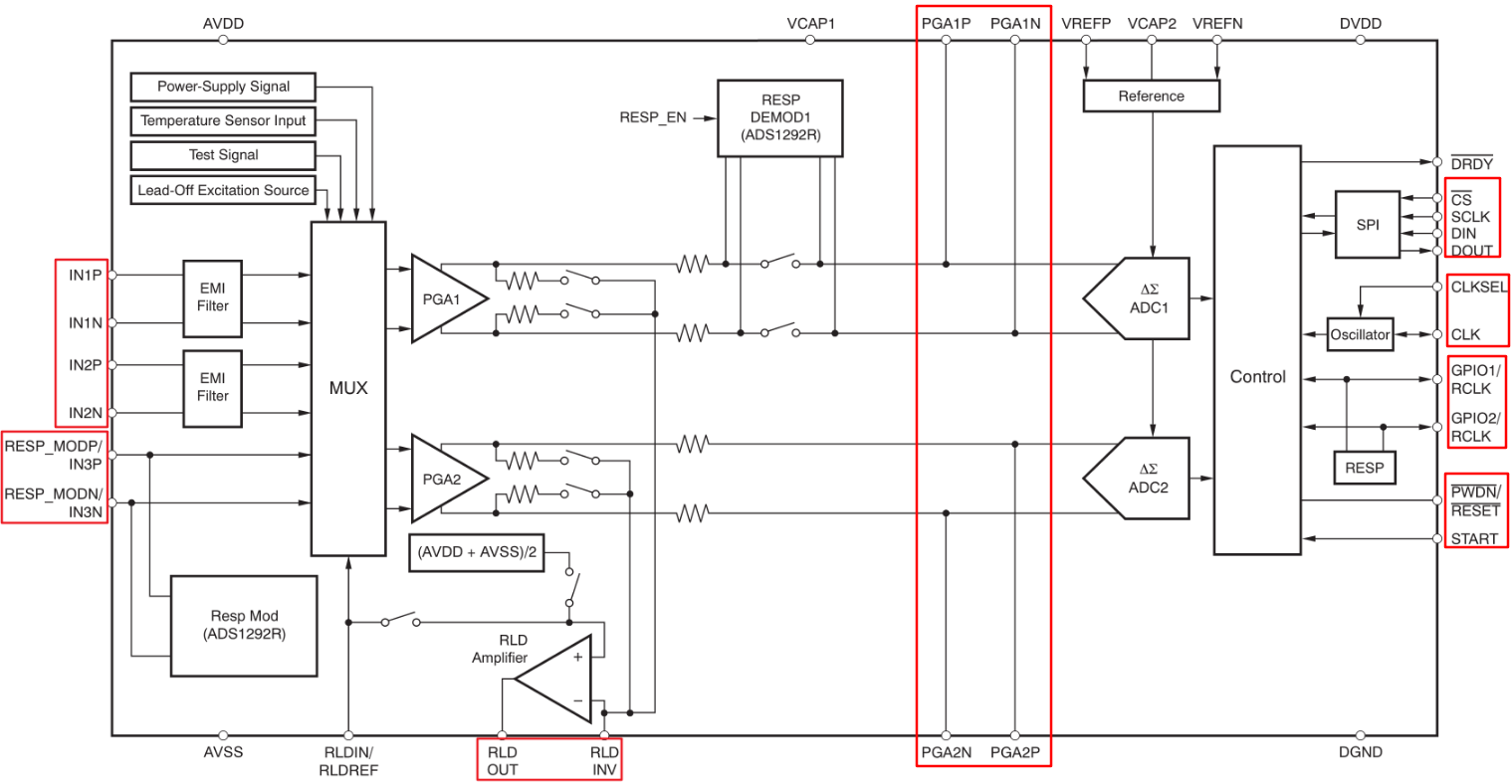
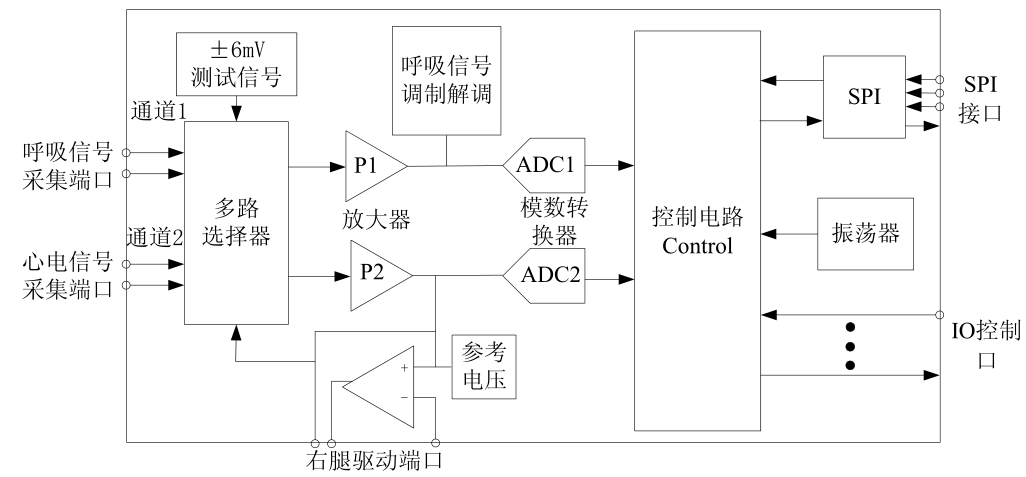
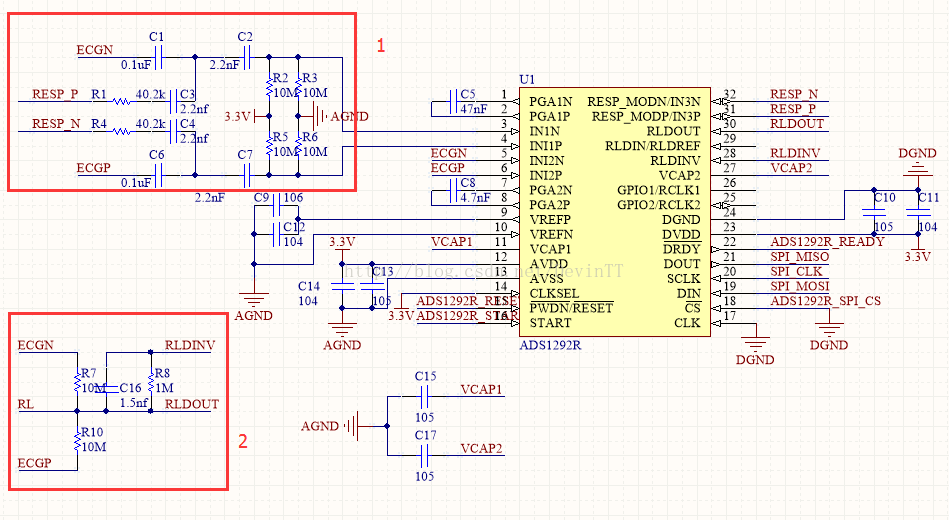
下圖1是官方資料手冊中擷取的,圖二是對應的中文內部框圖,圖三是在網上多次看到的原理圖。有些圖用的人多了自然有他的道理,這個不必糾結。設計電路首先要遵從資料手冊然後再在此電路的基礎上進行修改。
注意:由於人體阻抗高達幾KΩ 至幾十KΩ,在心電訊號採集時常常遇到訊號誤差大或者失真現象。心電訊號除了易受外界干擾以外,人體內部器官之間、表皮之間都存在相互影響,甚至是人的情緒變化也會引起心電訊號不穩定。
5、訊號輸入電路和右腿驅動電路設計
ADS1292R 可以實現雙連結訊號採集和模數轉換,通道 1(IN1N 和 IN1P)為呼吸訊號採集通道,IN3N 和 IN3P 為 ADS1292R 內部產生的32kHz 正弦電流訊號的輸出端。在正弦電流訊號的輸出電路中,可以在31號和32號引腳外加保護電阻,限制從 ADS1292R 流向人體的電流,同時還可以在電阻後加電容起到隔離流回人體的直流的作用(電阻和電容是串聯)。在呼吸訊號輸入電路中,C2和 C7起到抑制流回人體的直流電流的作用。C1和 C6起到人體免受電路突發故障所引起的大電流傷害的作用。
心電訊號極易受到 50Hz 工頻干擾,這種干擾常以共模的形式出現。一般在生物電訊號檢測電路中,需要對消驅動電路即右腿驅動電路來消除這種共模干擾,從而提高系統的共模抑制比。
ADS1292R 片內整合了右腿驅動電路,這樣有利於減小監護裝置的體積,降低功耗。右腿訊號由 RLDINV 埠輸入至片內右腿驅動電路,設定 ADS1292R內部 RLD_SENS 暫存器,使片內右腿驅動電路的輸出連至通道 2 以減少心電訊號中共模干擾。官方公開的資料中並未給出片內右腿驅動電路的反相放大器中電阻阻值,其放大倍數未知,為保證整個電路的訊號穩定、可靠,右腿驅動電路需要各位大佬根據系統需要外搭。
6、心電及呼吸訊號降噪
心電訊號非常微弱,典型值僅為 1mV 左右。正常的心電訊號大部分為 0.5~ 40Hz 的低頻訊號,而心電訊號的總體範圍為 0.05~100Hz。心電訊號極易受到來自外界、人體自身以及電路的干擾,如基線漂移、工頻干擾、肌電噪聲等。干擾訊號混雜於心電及呼吸訊號中,導致有用訊號畸變,有時有用訊號會完全淹沒在噪聲裡,故有用訊號的特徵值很難被提取。所以相應的濾波去噪處理是必要的。

常用的心電訊號去噪方法有硬體降噪和軟體濾波這兩種。硬體降噪主要是通過搭建相應的電路來實現濾波功能,但這種硬體濾波電路不僅搭建偵錯難度大,而且增加了成本、體積和功耗。建議大家通過軟體濾波,這對參加電賽的軟體手來說肯定不難,智慧車都搞過這點濾波的問題還能難道你這個大佬嗎?對吧!
7、主控晶片
TI杯當然是建議用TI提供的板子—MSP430。如果你前期沒有用過MSP430的板子也沒有問題,用STM32也不是不可以。另外晶片也微控制器通訊的方式是SPI通訊,我相信SPI通訊大家都會,因為有的7針的OLED顯示屏就是用的SPI通訊,這點就不用多說了。
8、驅動程式碼
程式碼初始化需要設定暫存器,具體程式中已經註釋的非常清楚,僅供參考啊!
void ads_Init(void)
{
uint8_t send_data[20], read_data[20];
ads_Reset(1); // 復位引腳置一,正常工作
osDelay(1000);
osDelay(100);
//指令:停止連續讀資料模式
send_data[0]=ADS1292R_CMD_SDATAC;
while(HAL_OK!= HAL_SPI_TransmitReceive(&hspi1,send_data,read_data,1,1000));
osDelay(10);
//寫設定暫存器2=0xa0,內部參考電壓為2.42V
send_data[0] = ADS1292R_CMD_WREG_1(ADS1292R_REG_CONFIG2);
send_data[1] = ADS1292R_CMD_WREG_2(1);
send_data[2] = 0xa0;
while(HAL_OK!= HAL_SPI_TransmitReceive(&hspi1,send_data,read_data,3,1000));
osDelay(10);
//寫設定暫存器1=0x01,連續轉換模式,取樣率為250
send_data[0] = ADS1292R_CMD_WREG_1(ADS1292R_REG_CONFIG1);
send_data[1] = ADS1292R_CMD_WREG_2(1);
send_data[2] = 0x01;
while(HAL_OK!= HAL_SPI_TransmitReceive(&hspi1,send_data,read_data,3,1000));
osDelay(10);
//寫導聯脫落檢測暫存器=0xF0,正負極分別為70%和30%,該功能實際未使用
send_data[0] = ADS1292R_CMD_WREG_1(ADS1292R_REG_LOFF);
send_data[1] = ADS1292R_CMD_WREG_2(1);
send_data[2] = 0xF0;
while(HAL_OK!= HAL_SPI_TransmitReceive(&hspi1,send_data,read_data,3,1000));
osDelay(10);
//寫通道1設定暫存器=0x30,設定增益為3,正常節點輸入
send_data[0] = ADS1292R_CMD_WREG_1(ADS1292R_REG_CH1SET);
send_data[1] = ADS1292R_CMD_WREG_2(1);
send_data[2] = 0x30;
while(HAL_OK!= HAL_SPI_TransmitReceive(&hspi1,send_data,read_data,3,1000));
osDelay(10);
//寫右腿驅動暫存器=0xEF,PGA的斬波頻率為4分頻,使能右腿驅動,關閉右腿驅動的脫落檢測,通道2的右腿驅動負極和正極分別連線到通道2輸入的負極和正極,通道1的右腿驅動負極和正極分別連線到通道1的負極和正極
send_data[0] = ADS1292R_CMD_WREG_1(ADS1292R_REG_RLD_SENS);
send_data[1] = ADS1292R_CMD_WREG_2(1);
send_data[2] = 0xEF;
while(HAL_OK!= HAL_SPI_TransmitReceive(&hspi1,send_data,read_data,3,1000));
osDelay(10);
//寫脫落檢測暫存器=0x0F,關閉通道1和2的電流方向檢測,使能通道1和2的正負極脫落檢測
//其實只使用了通道1,而且脫落檢測實際上沒有使用
send_data[0] = ADS1292R_CMD_WREG_1(ADS1292R_REG_LOFF_SENS);
send_data[1] = ADS1292R_CMD_WREG_2(1);
send_data[2] = 0x0F;
while(HAL_OK!= HAL_SPI_TransmitReceive(&hspi1,send_data,read_data,3,1000));
osDelay(10);
//寫呼吸控制暫存器1=0xF2,使能呼吸調變解調電路,呼吸解調相位為135°,時鐘為32KHz,內部時鐘
send_data[0] = ADS1292R_CMD_WREG_1(ADS1292R_REG_RESP1);
send_data[1] = ADS1292R_CMD_WREG_2(1);
send_data[2] = 0xF2;
while(HAL_OK!= HAL_SPI_TransmitReceive(&hspi1,send_data,read_data,3,1000));
osDelay(10);
//寫呼吸控制暫存器2=0x83,關閉偏置校準,呼吸控制頻率為32KHz,右腿驅動參考訊號為外部訊號
send_data[0] = ADS1292R_CMD_WREG_1(ADS1292R_REG_RESP2);
send_data[1] = ADS1292R_CMD_WREG_2(1);
send_data[2] = 0x83;
while(HAL_OK!= HAL_SPI_TransmitReceive(&hspi1,send_data,read_data,3,1000));
osDelay(10);
ads_Start(1); //啟動切換
osDelay(10);
//指令:連續讀模式
send_data[0]=ADS1292R_CMD_RDATAC;
while(HAL_OK!= HAL_SPI_TransmitReceive(&hspi1,send_data,read_data,1,1000));
osDelay(10);
}
void ads_Get_Data(uint8_t* raw_data)
{
static uint8_t sendBuf[9]={0,0,0,0,0,0,0,0,0};
HAL_SPI_TransmitReceive_DMA(&hspi1,sendBuf,raw_data,9);
}
