無線感測網路
2020-10-07 15:00:57
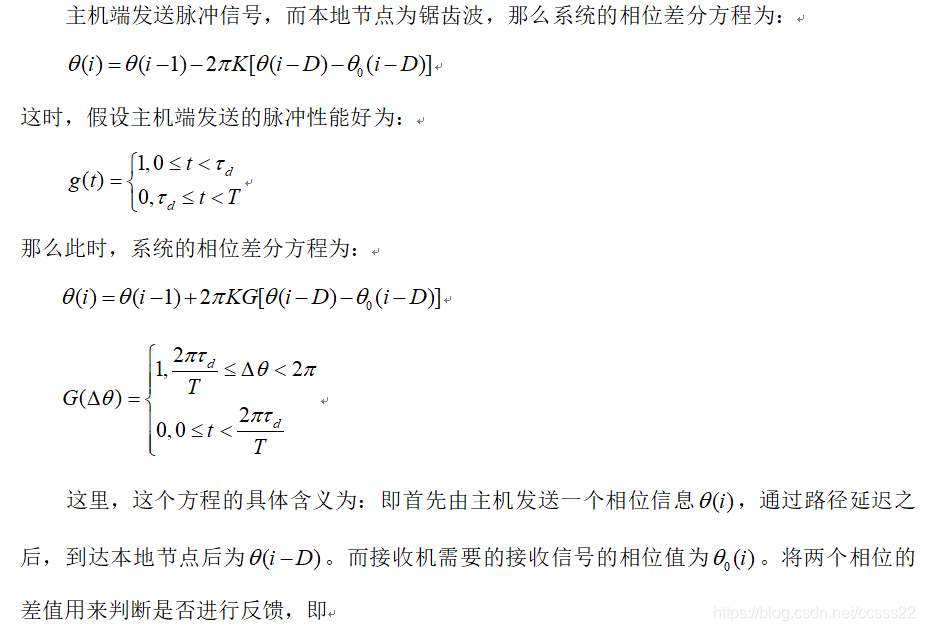
如果為1,那麼進行反饋,如果為0,那麼不進行反饋。
這裡為脈衝寬度。
但是,採用這種方法,就和論文中的脈衝相關的方法就沒區別了,即遇到滿足要求之後進行反饋,否則不反饋。
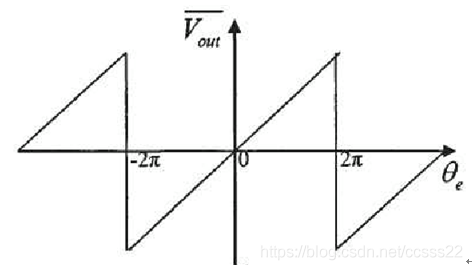
以上,是鋸齒波作為反饋波形的基本流程,下面主要是利用鋸齒波的鋸齒波具有相位誤差和誤差控制訊號的線性關係來進行快速的捕獲。
下面主要對鋸齒波的這個線性特性進行分析。
我們主要利用鋸齒波的這種線性特性進行分析:
首先,當主機傳送相位得到的相位誤差訊號為:,根據鋸齒波的這種線性特性,即:
這個部分的程式碼主要設計了相位可調的窄脈衝和相位可調的鋸齒波,以及在理想環境下的捕獲模擬,模擬的結果如下所示:
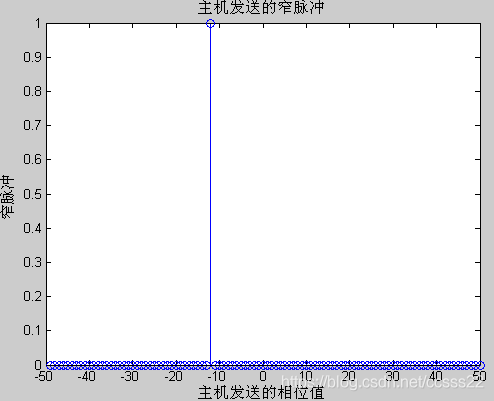
主機端傳送的窄脈衝:
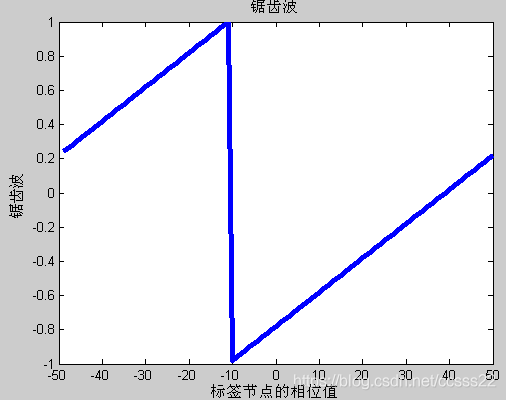
本地節點的鋸齒波:
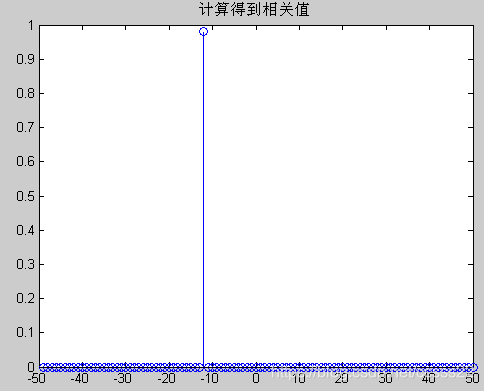
窄脈衝和鋸齒波的相關結果:
系統最後的模擬結果:
實際在引數預先設定的時候相位差為-1,這說明捕獲成果。
其中,程式碼中
![]()
這個是引數可調窄脈衝,三個引數分別為相位值,積分長度,窄脈衝寬度。
![]()
這個是引數可調鋸齒波,三個引數分別為相位值,積分長度,環路增益(鋸齒波斜率)。
B2 系統實際的捕獲過程:main02.m
這個部分,主要將該模組用於實際環境,加入噪聲進行模擬,並分析捕獲誤差。
主機通過無線傳送到節點的時候,往往會受到噪聲的干擾,因此,本地接收到的窄脈衝為:
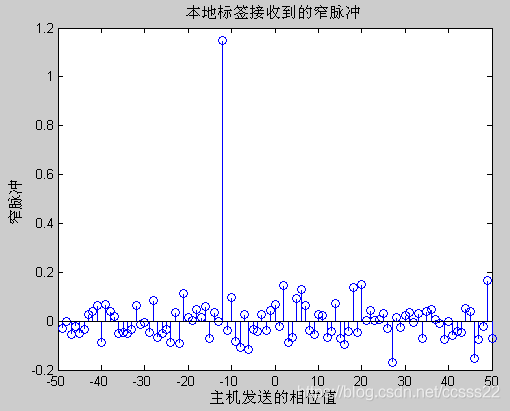
上面兩圖是不同噪聲下,標籤節點接收到的窄脈衝訊號。
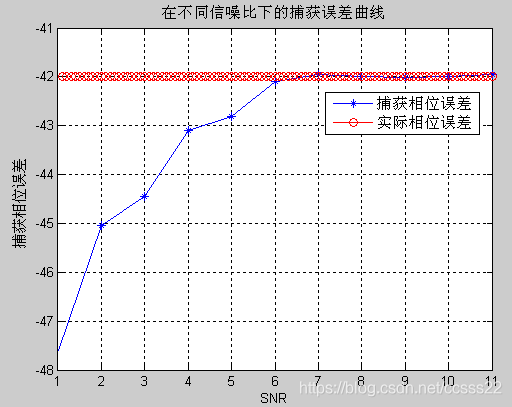
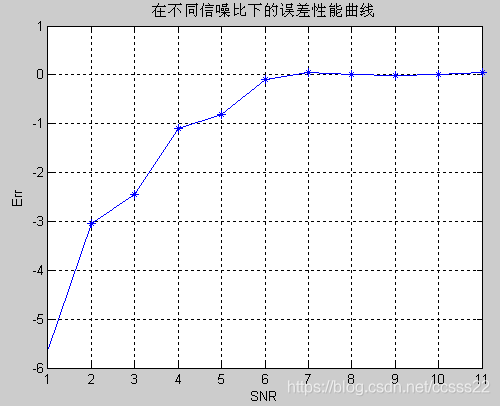
然後進行相關,我們可以得到如下的結果:
此訊號為誤差曲線,即在不同的噪聲下捕獲到的相位和實際的相位的誤差。從模擬結果可知,當SNR為6的時候,誤差接近0.