西門子plc s-7 1200驅動伺服電機方法
2020-10-07 02:00:52
前言
其實,伺服電機還用另外兩種工作模式,那就是速度控制和轉矩控制,不過應用比較少而已。速度控制一般都是有變頻器實現,用伺服電機做速度控制,一般是用於快速加減速或是速度精準控制的場合。
因為相對於變頻器,伺服電機可以在幾毫米內達到幾千轉,由於伺服都是閉環的,速度非常穩定。轉矩控制主要是 控制伺服電機的輸出轉矩,同樣是因為伺服電機的響應快。應用以上兩種控制,可以把伺服驅動器當成變頻器,一般都是用模擬量控制。
伺服電機最主要的應用還是定位控制,PLC對伺服電機的位置控制。位置控制有兩個物理量需要控制,那就是速度和位置,確切的說,就是控制伺服電機以多快的速度到達什麼地方,並準確的停下。
完整裝置連線
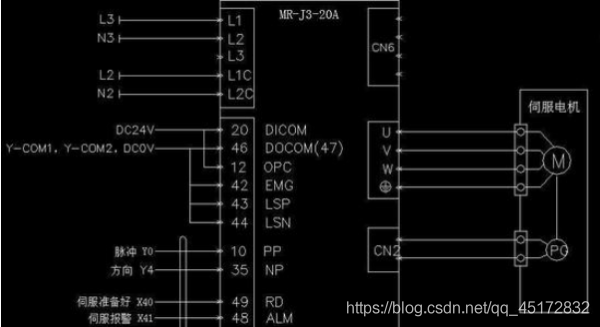
驅動實際接線圖
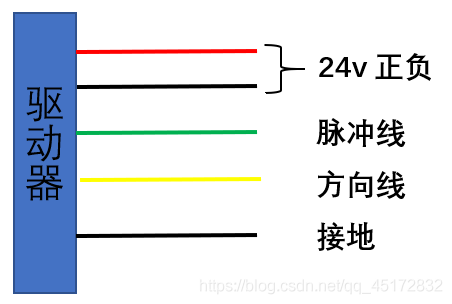
注意區分方向線和訊號線的位置,在plc中的設定與實際接線要保持一致
程式編寫
新建專案
首先新建plc專案,建專案方法請參考https://blog.csdn.net/qq_45172832/article/details/104638001
新增工藝物件
點選新增物件

設定工藝物件
新增方向輸出埠和脈衝輸出埠
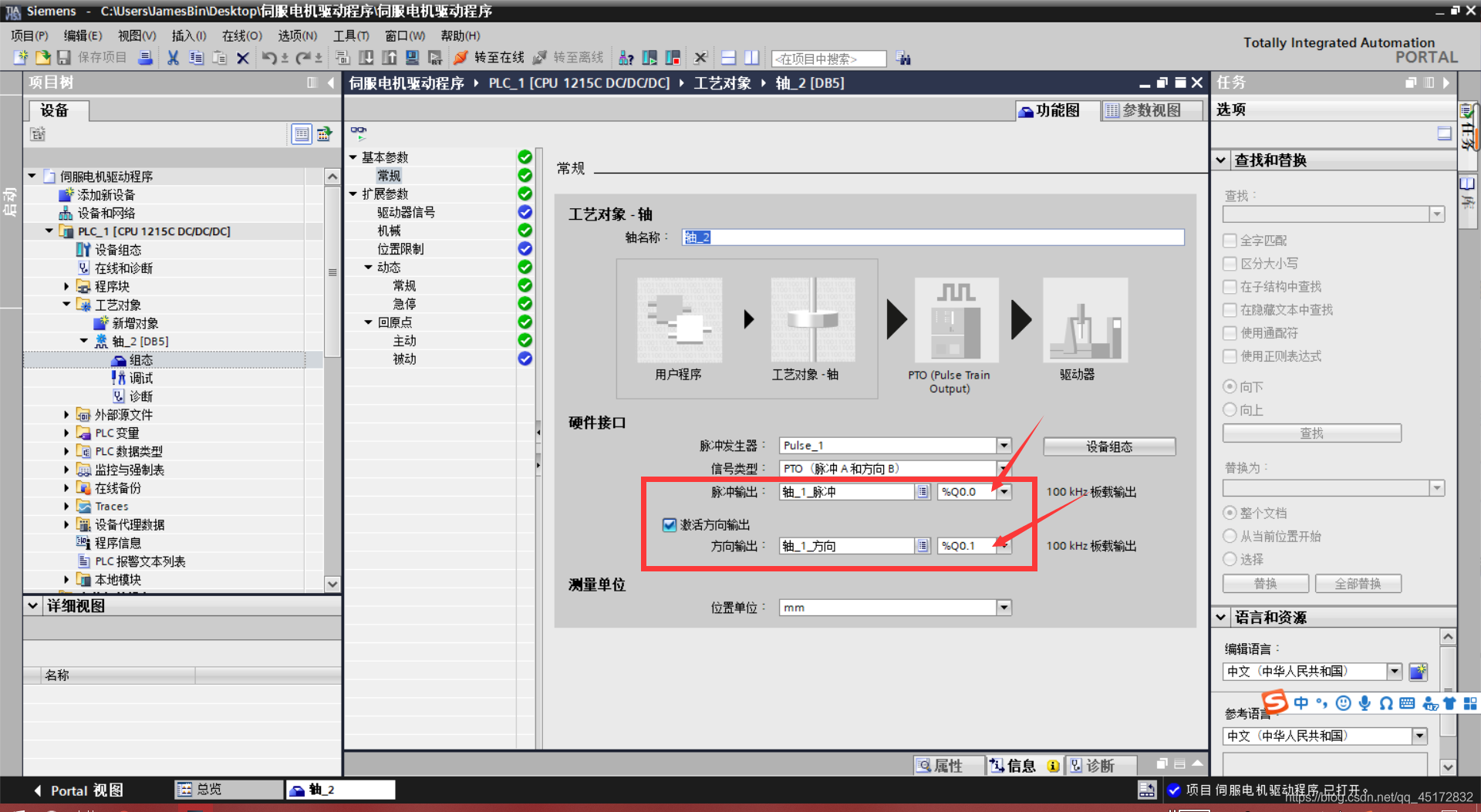
其他只需要保持預設即可,如有更高要求可進行詳細設定
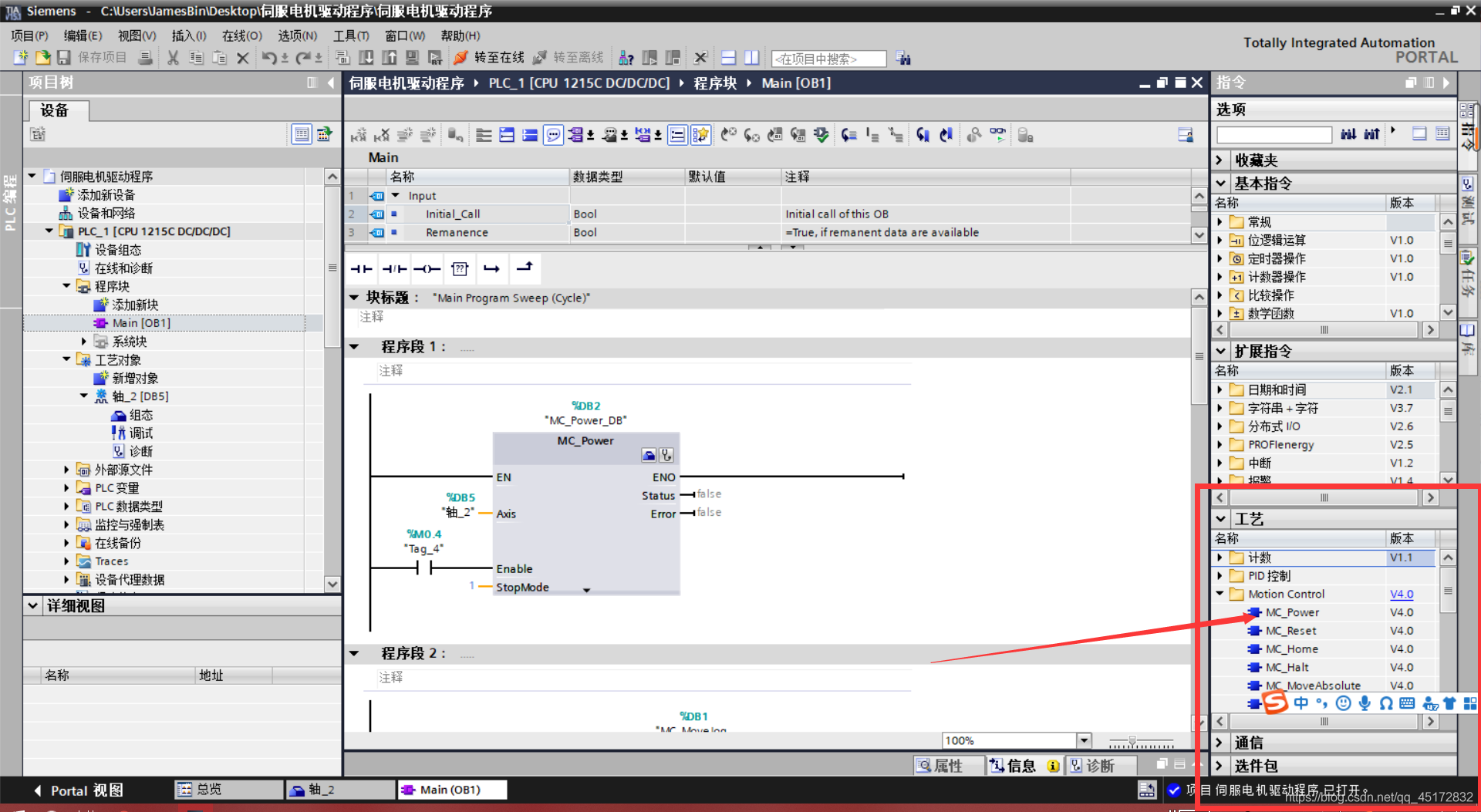
程式編寫
啟動軸
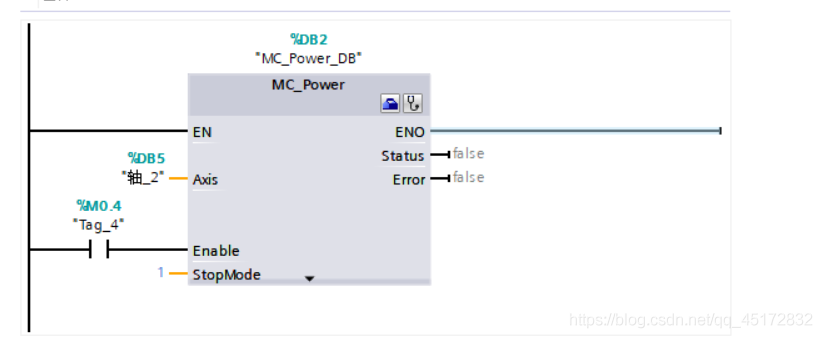
啟動方法
選擇工作模式
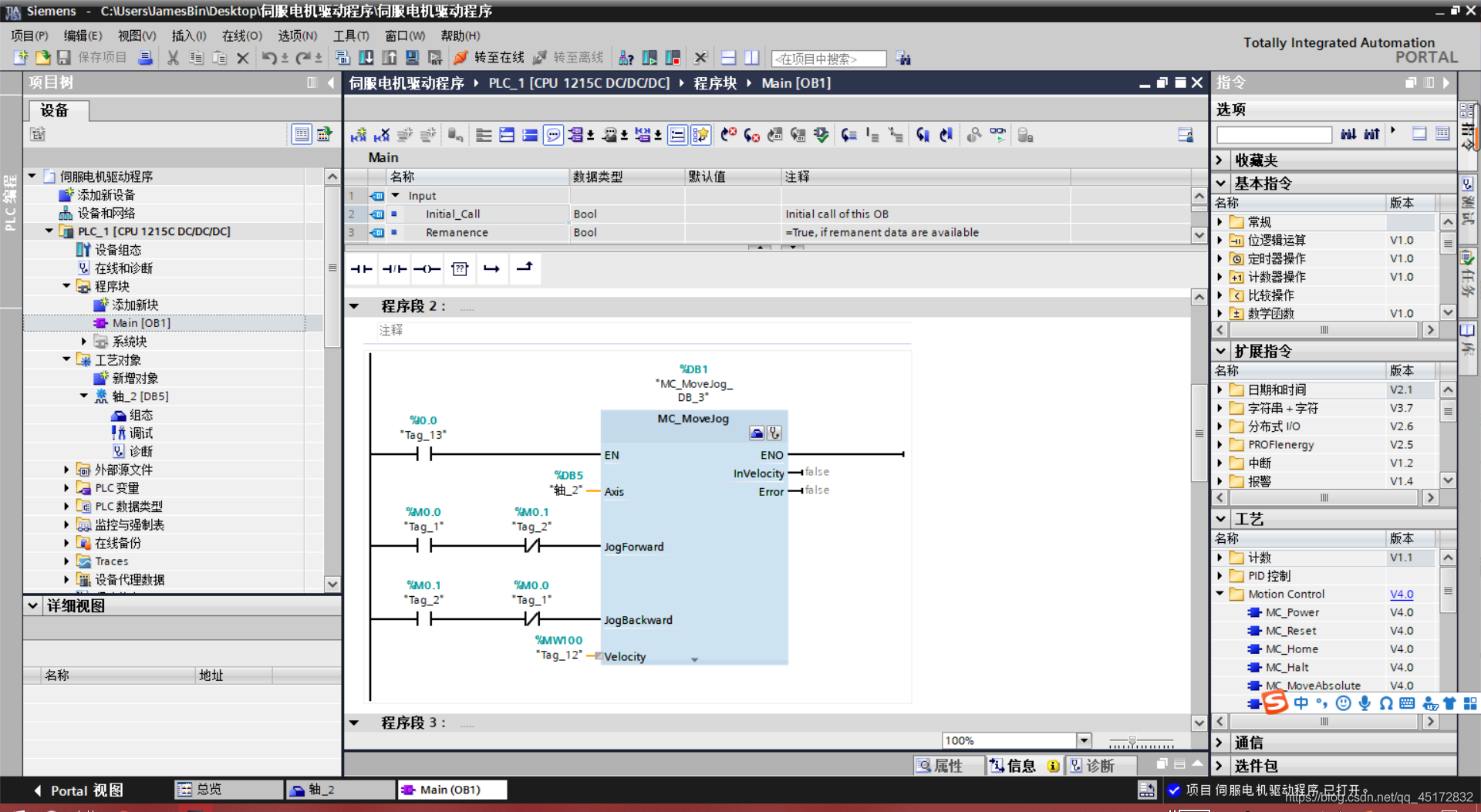
不同的工作模式詳細參照說明手冊進行學習設定