從零開始做自動駕駛定位-學習筆記-3-軟體框架
2020-10-05 19:00:22
從零開始做自動駕駛定位-學習筆記-3-軟體框架
從零開始坐自動駕駛學習筆記,主要參考 任乾老師的知乎 進行實踐記錄
本人偵錯環境
ubuntu18.04
pcl 1.9
glog
ceres 1.4
g2o
安裝庫(踩坑)
編譯任乾老師的工程,需要預安裝一些庫,這裡進行踩坑
pcl 1.9
Ceres1.14
glog
pip安裝
pip install glog
g2o
g2o安裝包在 任乾老師的工程的 setup_file下,對 g2o.zip進行解壓
cd g2o
cd build
cmake .. // 很快
make // 時間比較長
sudo make install // 安裝
操作演示
將任乾老師的 github 工程移植到 自己的工作空間中,並進行catkin_make 編譯
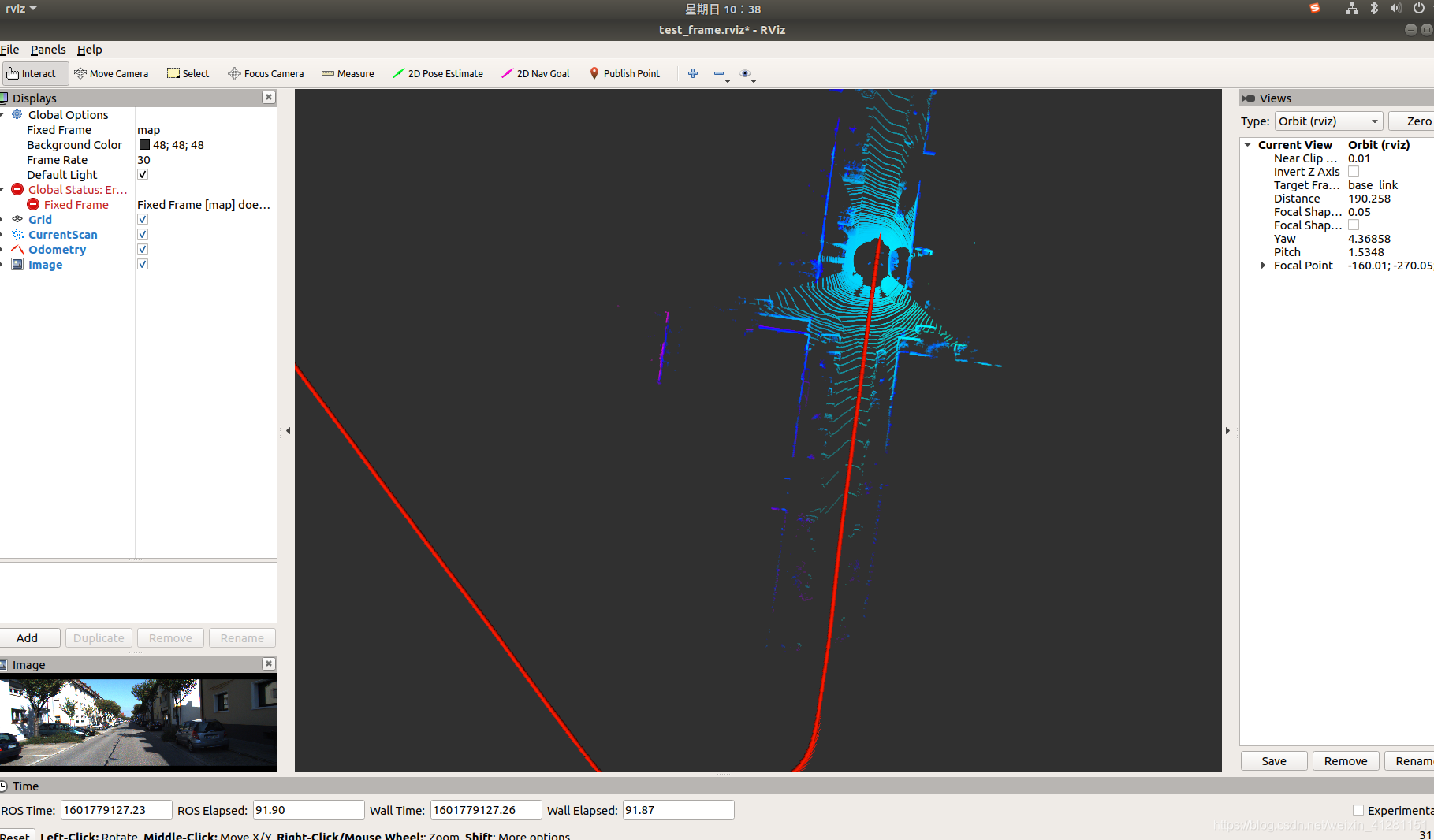
 在執行上一章結果的基礎上,執行test_frame.launch,釋出GNSS IMU訊息進行同步處理
在執行上一章結果的基礎上,執行test_frame.launch,釋出GNSS IMU訊息進行同步處理
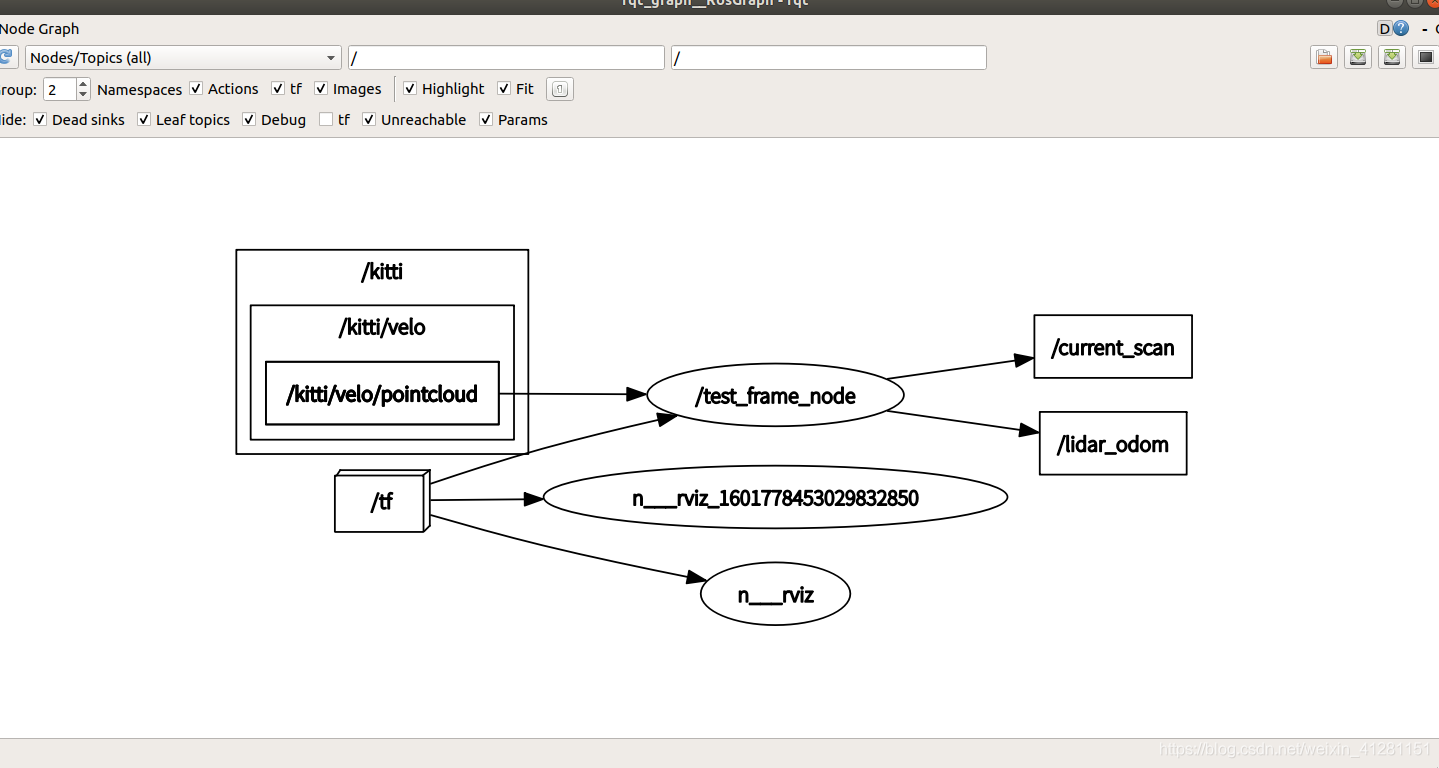
roslaunch lidar_localization test_frame.launch
rqt_graph
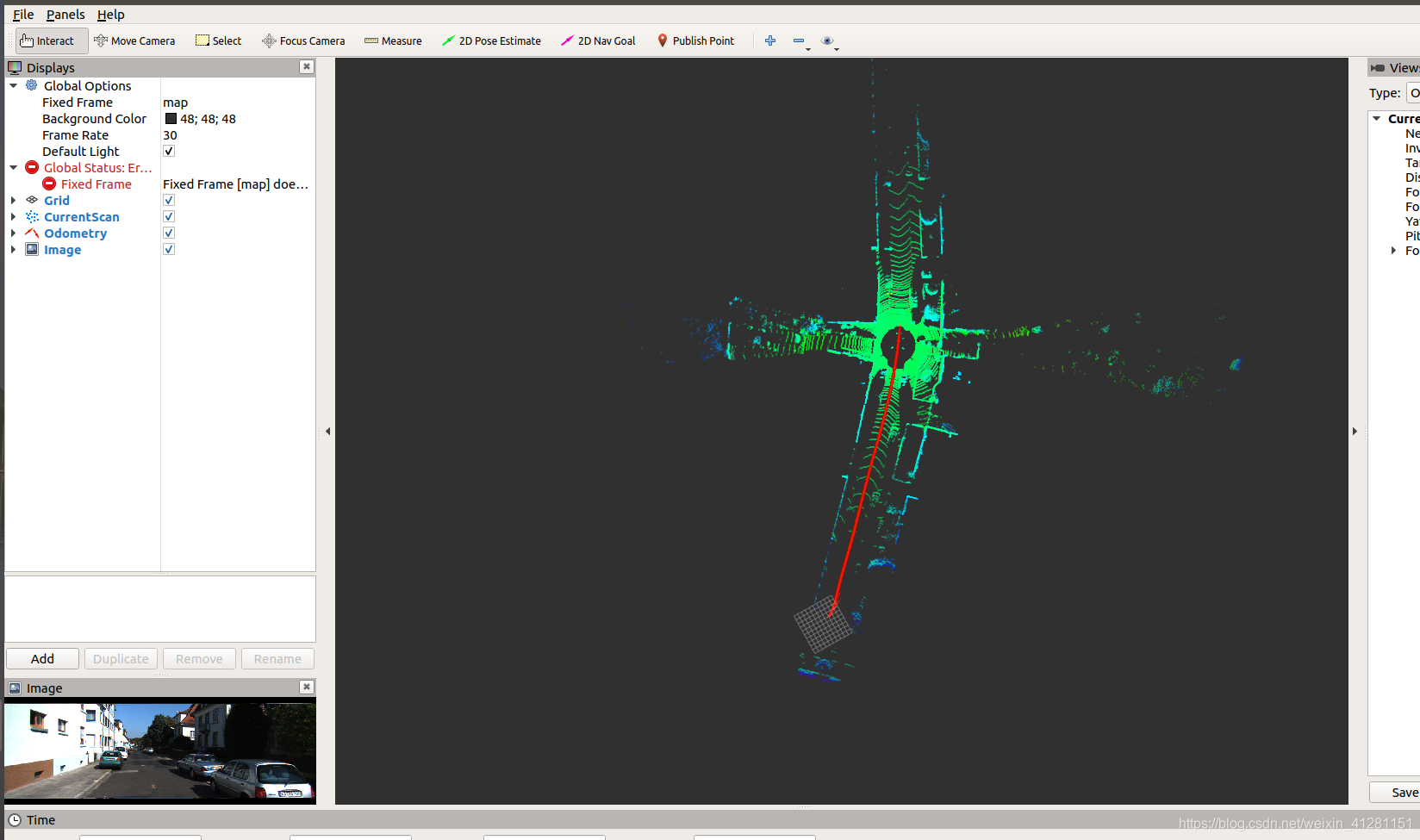
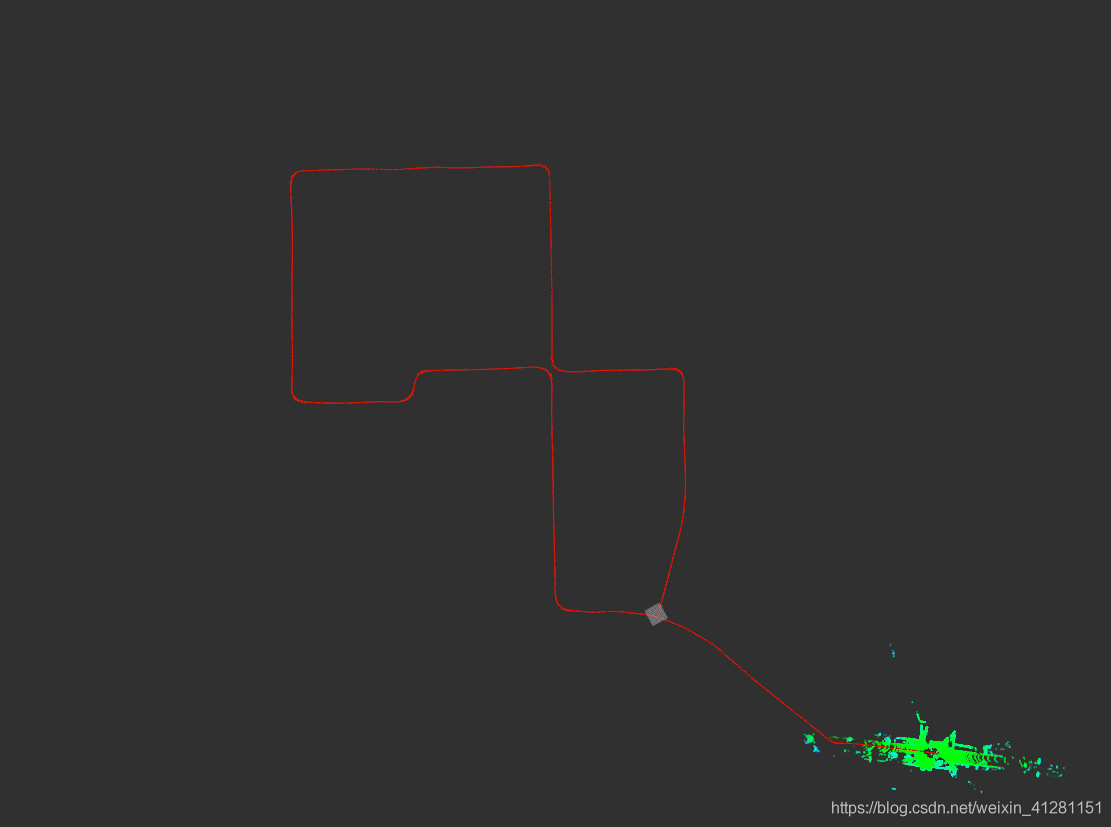
最後記錄下的路徑
