ESP8266和ROS收發訊息讀取模擬量控制LED亮度
2020-09-30 12:00:51
如果需要ESP8266和ROS通訊先閱讀如下部落格:
-
ESP8266和ROS偵錯一些問題彙總
這裡測試環境melodic和noetic都可行。
原始碼如下:
#if (ARDUINO >= 100)
#include <Arduino.h>
#else
#include <WProgram.h>
#endif
#include <ESP8266WiFi.h>
#include <ros.h>
#include <std_msgs/String.h>
#include <std_msgs/Int16.h>
#include <std_msgs/Float64.h>
#include <Servo.h>
#include <rosserial_arduino/Adc.h>
//
// WiFi Definitions //
//
const char* ssid = "HUAWEI_WiFi";
const char* password = "cslgcslg";
IPAddress server(192, 168, 3, 153); // ip of your ROS server
IPAddress ip_address;
int status = WL_IDLE_STATUS;
WiFiClient client;
class WiFiHardware {
public:
WiFiHardware() {};
void init() {
// do your initialization here. this probably includes TCP server/client setup
client.connect(server, 11411);
}
// read a byte from the serial port. -1 = failure
int read() {
// implement this method so that it reads a byte from the TCP connection and returns it
// you may return -1 is there is an error; for example if the TCP connection is not open
return client.read(); //will return -1 when it will works
}
// write data to the connection to ROS
void write(uint8_t* data, int length) {
// implement this so that it takes the arguments and writes or prints them to the TCP connection
for(int i=0; i<length; i++)
client.write(data[i]);
}
// returns milliseconds since start of program
unsigned long time() {
return millis(); // easy; did this one for you
}
};
Servo s;
int i;
void chatterCallback(const std_msgs::String& msg) {
i = atoi(msg.data);
s.write(i);
}
std_msgs::String str_msg;
rosserial_arduino::Adc adc_msg;
ros::Publisher chatter("chatter", &str_msg);
ros::Publisher p("adc", &adc_msg);
ros::Subscriber<std_msgs::String> sub("message", &chatterCallback);
ros::NodeHandle_<WiFiHardware> nh;
char hello[20] = "ESP8266 wifi alive!";
void setupWiFi()
{
WiFi.begin(ssid, password);
Serial.print("\nConnecting to "); Serial.println(ssid);
uint8_t i = 0;
while (WiFi.status() != WL_CONNECTED && i++ < 20) delay(500);
if(i == 21){
Serial.print("Could not connect to"); Serial.println(ssid);
while(1) delay(500);
}
Serial.print("Ready! Use ");
Serial.print(WiFi.localIP());
Serial.println(" to access client");
}
int averageAnalog(int pin){
int v=0;
for(int i=0; i<2; i++) v+= analogRead(pin);
return v/2;
}
void setup() {
Serial.begin(115200);
setupWiFi();
delay(2000);
s.attach(13); // PWM pin
nh.initNode();
nh.advertise(chatter);
nh.subscribe(sub);
nh.advertise(p);
}
void loop() {
str_msg.data = hello;
chatter.publish( &str_msg );
adc_msg.adc0 = averageAnalog( 0 );
p.publish( &adc_msg );
nh.spinOnce();
delay( 10 );
}簡單解釋一下,釋出節點chatter,adc,訂閱節點message。
- message提取數值作為PWM波送到13腳控制LED亮度(佔空比);
- adc採集模擬量繪製曲線;
- chatter只用作釋出訊息,告知主機連線成功。
使用如下命令啟動wemos D1和ROS:
- roscore
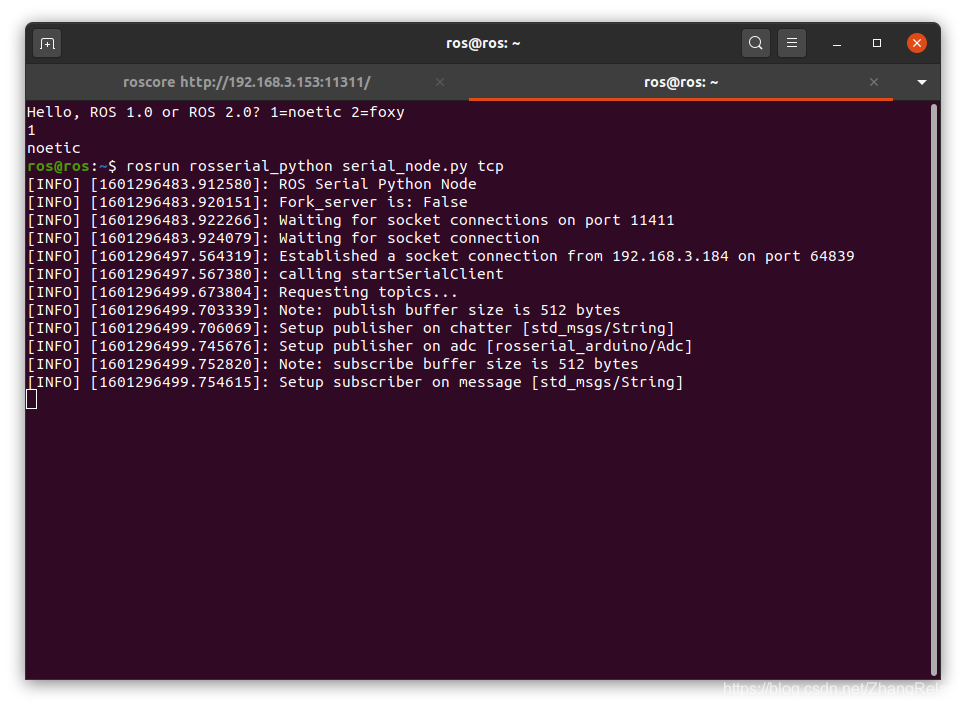
- rosrun rosserial_python serial_node.py tcp
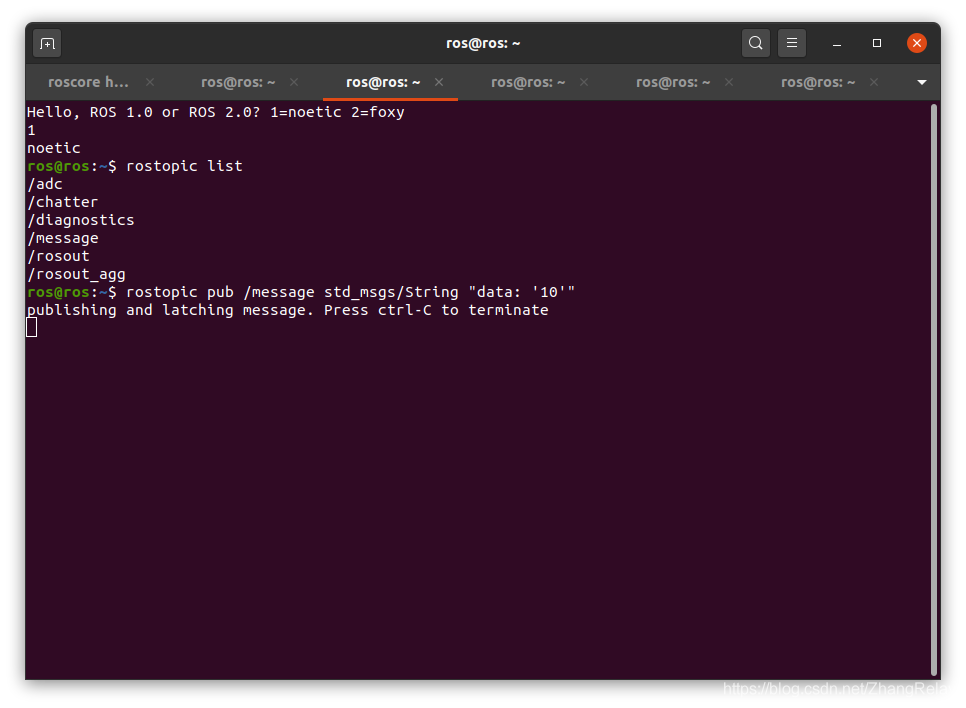
- rostopic pub /message std_msgs/String "data: '10'"
- rostopic echo /adc
- rostopic echo /chatter
過程如下:
roscore
rosrun rosserial_python serial_node.py tcp
主題列表:

rostopic pub /message std_msgs/String "data: '10'"

使用rqt_graph檢視所有節點狀態:

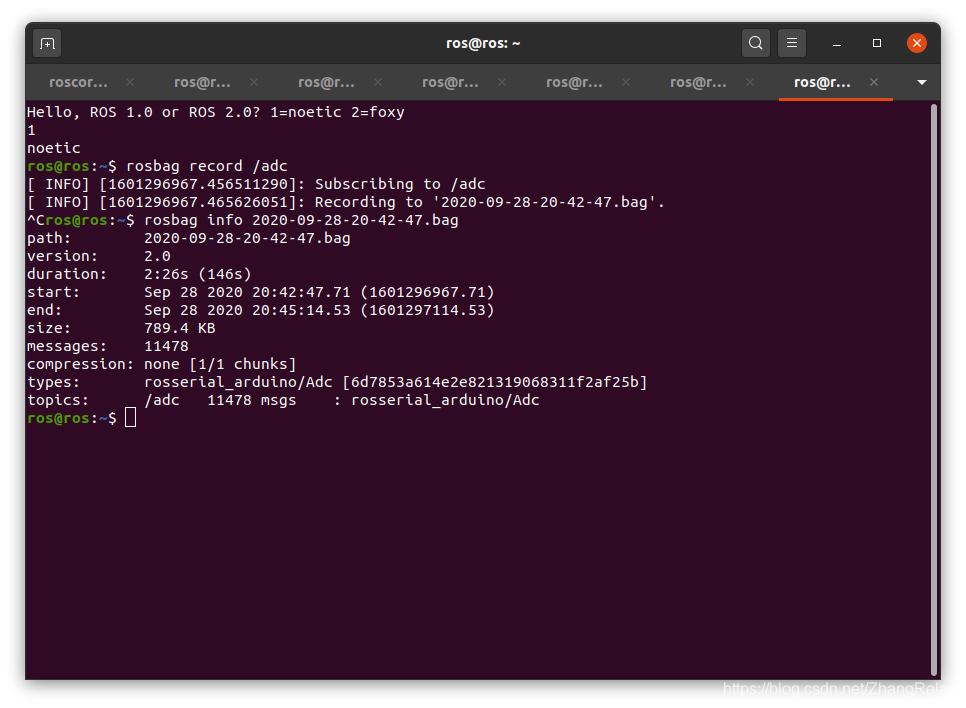
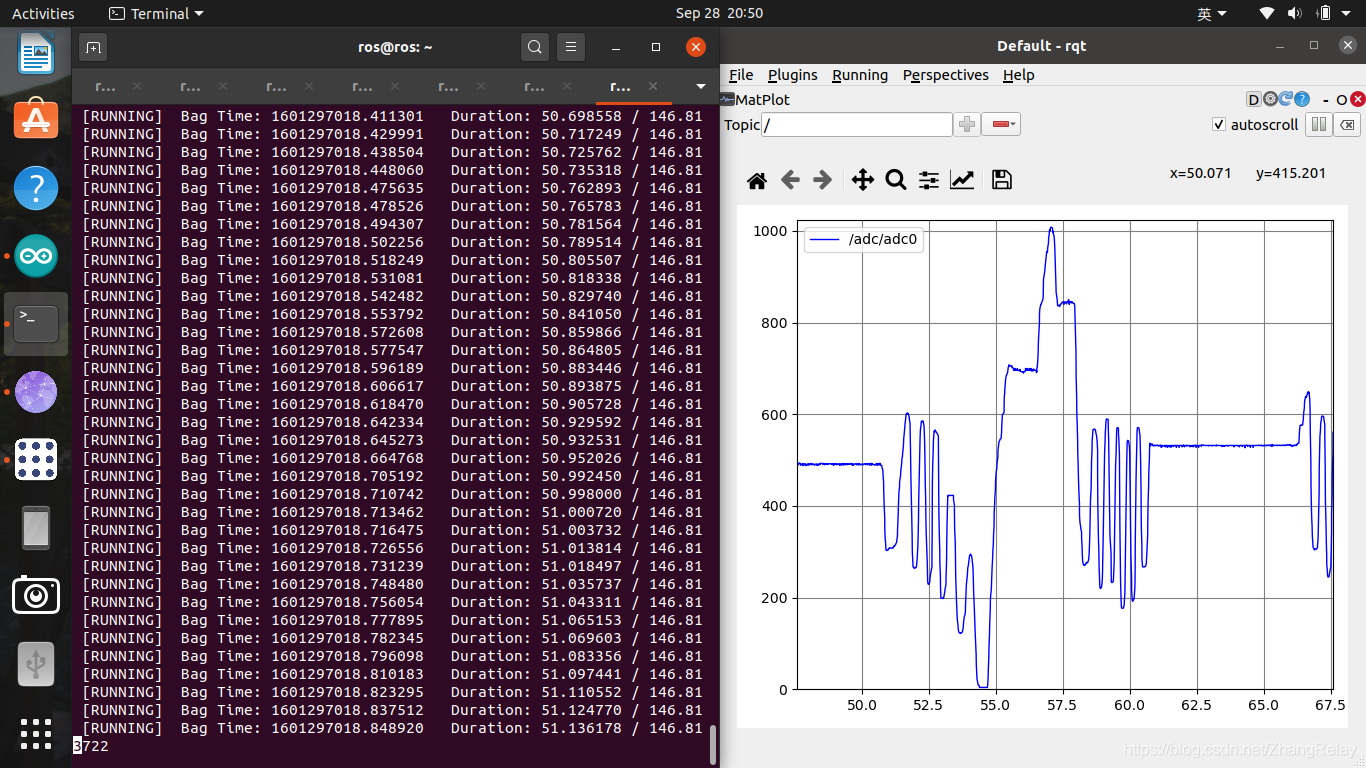
使用rosbag記錄ADC資料並使用plot檢視曲線:

關閉所有節點,只留下roscore,使用rosbag play檢視記錄資料:

所有Arduino,stm32等微控制器都可以藉助ROS實現物聯網硬體功能。
-Fin-



LoveRobot,Go!!!!人工智慧和機器人粉,從事機器人工程專業本科教學和科研工作,研究方向包括多機器人模擬技術,控制與共同作業,機器人系統軟硬體開發等。