前言與必要的常識
前言與必要常識
自動控制原理是我印象深刻的一門課,因為它讓我第一次體驗到了100分的快樂(當然,運氣佔了很大成分),我本科學習的自動控制其實內容較少,主要是複數域下的經典控制理論和基於狀態空間的現代控制理論,而且都是單輸入單輸出系統,且是連續的;我聽說哈工大的同學還要學離散的系統等等。因此請讀者諒解我的才疏學淺,我就只寫一下我所學過的內容吧。
在開始討論之前,先進行一下簡單的梳理,第一二章主要內容是自控系統的介紹與傳遞函數的化簡,對於傳遞函數化簡問題,有兩種方式:1.通過框圖的規則化簡,2.根據訊號流圖,根據梅森增益公式直接計算。第三章主要內容為穩態誤差計算與評價動態效能指標的計算,當然,該章節還講到了第一種判斷系統穩定性的方式:勞斯判據。在第四章中,主要內容為根軌跡繪製,根軌跡的繪製是重點,也可以作為一種判斷穩定性的方式,針對具體問題分為0度和180度根軌跡。第五章主要內容為頻率響應,這和訊號系統裡學的頻率響應是一樣的。第六章前半部分為Nyquist圖和Bode圖的繪製,後半部分為如何通過Nyquist圖或者Bode圖判斷系統穩定性,在最後還提到相角裕度的計算,並在最小相位系統前提下提出了通過相角裕度判斷穩定性的直觀方法。第七章為系統的校正,不過我只明白超前裝置和滯後裝置的校正。最後一章內容很多,全部都是現代控制理論,從如何構造狀態空間到極點設定與設計狀態觀測器均包含在內。
個人理解下,本科所學自控的框架就是以上,下面將介紹必要常識,我覺得能記住是更好的,當然,其實多看幾遍也就記住了。
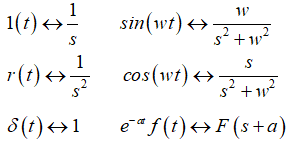
常用拉普拉斯變換對:
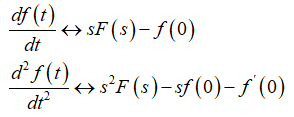
 在解常微分方程時,一般可以變換為:
在解常微分方程時,一般可以變換為:
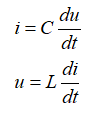
當遇到含電容,電感的電路方程時,有:
對於以下控制系統:
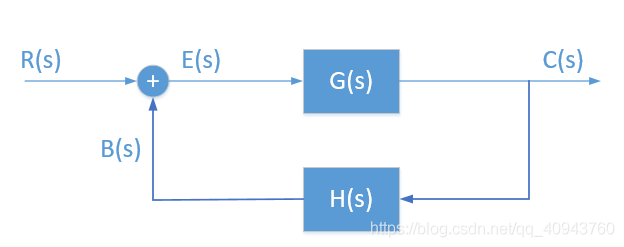
傳遞函數為:
開環傳遞函數,反饋傳遞函數分別為:
 以上就是本篇的要點,很基礎,但也比較重要。
以上就是本篇的要點,很基礎,但也比較重要。