鴻蒙OS開原始碼精要解讀之——init
鴻蒙OS開原始碼精要解讀之——init
作者介紹:
中科創達OpenHarmony研究組
說明:
中科創達OpenHarmony研究組第一時間對https://codechina.csdn.net/openharmony上開源的程式碼進行了詳盡的程式碼研讀和學習。為此,我們打算編寫一系列篇幅中等,內容精煉的原始碼分析文章來引領大家更進一步的走進鴻蒙OS。隨著對程式碼的瞭解,廣大開發者想親自動手參與的意願和信心也會隨之增強——這也是鴻蒙OS開源的意義所在。
本篇內容摘要:
本篇以OpenHarmony中ipcamera_hi3518ev300為編譯目標,介紹init程序的相關程式碼。
寫在前面的話
我們對OpenHarmony的程式碼進行了一個簡單粗略的統計。除去所有的third_party程式碼(即OpenHarmony使用的第三方開源庫),其他剩餘的程式碼中,以.c、.h檔案為統計入口,總有效程式碼行數(不含註釋、空行等,統計工具為tSourceCounter)為325627行。其中,歸屬kernel目錄下的總有效程式碼行數為74150行。整個OpenHarmony中,kernel部分佔比為22.8%左右,程式碼量上佔大頭的還在於kernel之上的、我們稱之為Framework的部分。根據我們在Android系統上多年的摸索和經驗,Framework恰恰是Android OS的精髓。所以,以OpenHarmony目前才20多萬行的Framework程式碼量來看,感興趣的開發者在這塊參與共建、獻策獻力的機會非常大。
1. OpenHarmony原始碼的下載和編譯
先介紹程式碼的下載和編譯。我們研究組用得是ubuntu 19.10的主機環境。
1.1 原始碼下載
按照codechina.csdn官網的原始碼下載指南:https://codechina.csdn.net/openharmony/docs/-/blob/master/get-code/%E6%BA%90%E7%A0%81%E8%8E%B7%E5%8F%96.md
我們使用的是第四種方式「獲取方式4:從程式碼倉庫獲取」。執行這一節中的幾個命令,即可得到整個原始碼倉庫。
1.2 編譯原始碼
我們選擇的編譯目標是「Hi3518解決方案」,其編譯後的輸出目錄名為ipcamera_hi3518ev300。ipcamera_hi3518ev300是一個基於海思的ip攝像頭裝置。相關的介紹檔案入口在https://codechina.csdn.net/openharmony/docs/-/blob/master/quick-start/%E6%90%AD%E5%BB%BA%E7%8E%AF%E5%A2%83-2.md。
注意,編譯不同的解決方案需要建立對應的編譯環境。對hi3518來說,開發者需要按照上述連結裡的「搭建環境」來下載和設定。
一切就緒後,在原始碼根目錄下執行 python build.py。如果不帶引數的話,它會提醒你指定編譯目標,截圖如下:
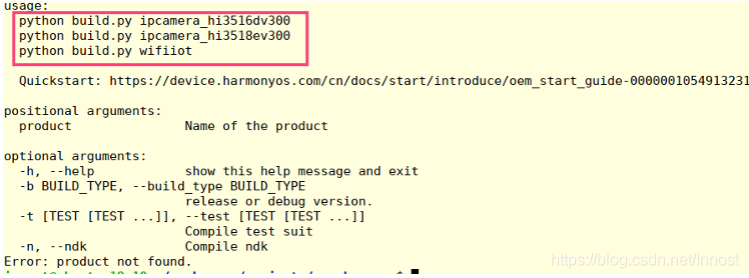
圖1 python build.py不帶引數的執行結果
這次,我們通過python build.py ipcamera_hi3518ev300即可編譯「Hi3518解決方案」。編譯耗時10幾分鐘。
注意,編譯過程中可能出現找不到<valgrind/valgrind.h>的錯誤。這是因為目前我們下載的程式碼中沒有包含valgrind的標頭檔案。開發者可以手動將/usr/include/valgrind目錄拷貝到prebuilts/lite/sysroot/usr/include下即可(僅限Ubuntu平臺,需提前安裝好valgrind工具)。
1.3 OpenHarmony編譯相關小知識介紹
OpenHarmony原始碼編譯系統使用了google開發的gn工具以及ninjia。這二者結合起來比傳統的makefile編譯系要高效,尤其適合大系統的並行編譯。對開發者而言,如果要參與OpenHarmony的開發,需要對gn的語法有些瞭解。本文僅做一些最基本的介紹:
- 使用gn工具的話,開發者將編譯規則寫在名為BUILD.gn檔案中。和Makefile一樣,gn檔案有自己的語法規則,屬於領域語言(Domain Specific Language,DSL)。gn語法不難,但編譯規則本身有很多內容,所以一下子要掌握全部內容也不容易。
- gn支援自定義模板函數,可放在名為.gni的檔案中。OpenHarmony中最常見到的gn模板檔案為./build/lite/config/component/lite_component.gni。.gn檔案中通過import可匯入gni模板檔案。OpenHarmony定義了lite_component、lite_library等模板函數。
- gn中,可執行檔案的編譯函數入口為exectuable("檔名"),共用庫的編譯規則函數為shared_library("檔名")。所以,如果要搜尋某個檔案對應的編譯規則,可以先搜尋所有的BUILD.gn檔案,然後grep executable。以下是我們grep所有的executable的結果截圖。

圖2 grep BUILD.gn中executable的結果示意
通過這種方式,我們能很快定位到比如init對應的程式碼在什麼地方。
最後,我們再簡單介紹下OpenHarmony編譯系統中和底層OS有關的一個條件編譯控制變數ohos_kernel_type。目前,該變數有四個取值,分別為"liteos_a"、"liteos_m"、"liteos_riscv"和"linux":
- "liteos_a"和"linux"經常做為一組進行判斷。liteos_a實際對應的是Cortex-A系列,其效能相對較高,可以跑Linux系統。
- "liteos_m"和"liteos_riscv"往往是一組的。liteos_m對應的是Cortex-M系列,liteos_riscv是Riscv晶片的表示,二者可能都是針對效能一般,功耗較低的裝置。
ohos_kernel_type的取值由build/lite/product/解決方案名.json檔案中的product欄位決定。例如,我們選擇的ipcamera_hi3518ev300的組態檔內容截圖如下,它的kernel欄位值為"liteos_a"。

圖3 build/lite/product/ ipcamera_hi3518ev300.json組態檔示意圖
編譯完成後,所有編譯生成物都在out/ipcamera_hi3518ev300目錄下。
2 init原始碼精要解析
init是Linux系統上的第一個應用程序,是其它程序的源頭。對ipcamera_hi3518ev300來說,它的編譯產物中也有一個init程序。
在上面提到的out/ipcamera_hi3518ev300目錄下,有一個rootfs.tar檔案。這個檔案裡就是裝置上根檔案系統的內容。開啟其中的/rootfs/bin目錄,可以看到此次編譯的可執行程式如下截圖所示:
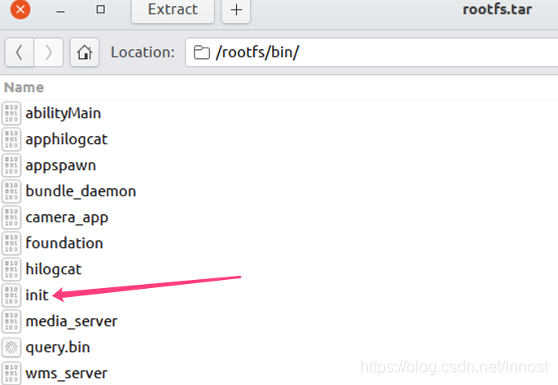
圖4 out/ipcamera_hi3518ev300/rootfs.tar/bin內容示意
藉助圖2裡提到的辦法,我們可以定位到init對應的程式碼路徑為base/startup/services/init_lite/。其內容如下圖所示:
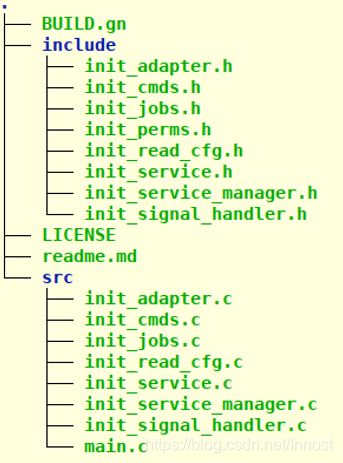
圖5 init_lite原始碼檔案示意圖
main.c是整個init的入口。我們簡單看一下它的程式碼,如下所示。
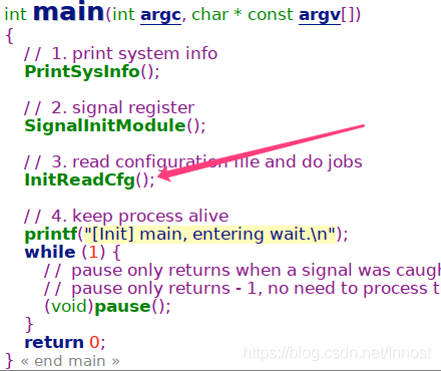
圖6 init_lite/main.c
init main函數非常精簡,非常符合"lite"輕量簡便的風格。當然,也不排除未來init的程式碼會越來越複雜。我們在AOSP上觀察到的情況就是一個例子——AOSP裡現在的init的相關程式碼非常複雜)。
我們對InitReadCfg比較感興趣,這個函數內部將讀取/etc/init.cfg檔案。這個檔案在圖4中提到的rootfs.tar中可以找到,下圖是其內容的示意:
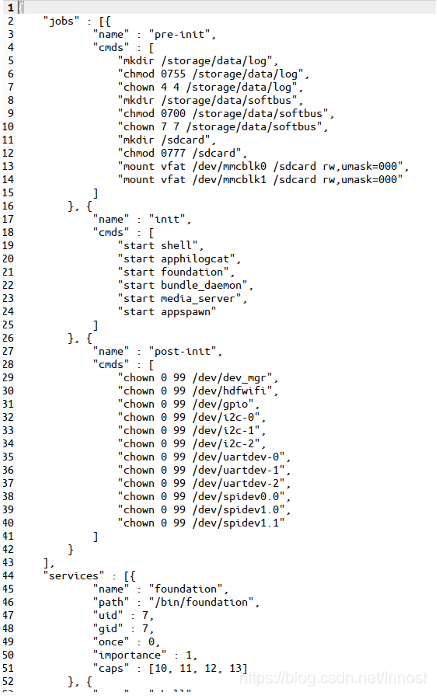
圖7 rootfs.tar/etc/init.cfg
init.cfg本質上是一個json格式的檔案。它包括一個名為"jobs"的陣列和一個名為"services"的陣列。
- 對"jobs"來說:內部分別包含"pre-init"、"init"和"post-init"三個元素。從上面的截圖中可以看出,這三個元素對應的就是設定掛載一些裝置、設定好路徑,啟動服務等工作。
- 對"services"來說:它包含一組服務的定義。所謂的服務,就是系統裡的關鍵程序。可以猜測到,init將根據service的設定來啟動對應的服務程式,並設定它的uid、gid、程序優先順序和許可權等。
如果開發者對Android系統有一定了解的話,會發現OpenHarmony和AOSP在init的工作流程上有著相似的設計思路。不過,對OpenHarmony目標裝置來說,使用json格式無疑是比較簡單且方便的。
最後,我們再看一下init的另外一個重要職能——服務程序狀況監控。init.cfg中的那些服務屬於系統關鍵程序。執行過程中如果它們出現異常導致程序退出,需要有個辦法將它們重新啟動以保證業務連續性。
這個功能的實現就是利用Linux系統的SIGCHILD訊號。init在SignalInitModule中監聽了該訊號並設定了對應的訊號處理常式——SigHandler。SigHandler函數的具體處理過程則比此處說得要更復雜一點。現在,這部分內容就留給讀者們自行探索了!!