STM32串列埠空閒中斷+DMA讀取MPU6050資料
STM32串列埠空閒中斷+DMA讀取MPU6050資料
STM32串列埠空閒中斷
接收資料的流程:
串列埠接收DMA在初始化的時候就處於開啟狀態,一直等待資料的到來,在軟體上無需做任何事情,只要在初始化設定的時候設定好設定就可以了。
判斷資料資料接收完成:
這裡判斷接收完成是通過串列埠空閒中斷的方式實現,即當串列埠資料流停止後,就會產生IDLE中斷。這個中斷裡面做如下幾件事:
- 關閉串列埠接收DMA通道,2點原因:a.防止後面又有資料接收到,產生干擾。b.便於DMA的重新設定賦值,下面第4點。
- 置位接收完成標誌位
- 處理接收buffer中資料
- 重新設定DMA下次要接收的資料位元組數,注意,這裡是給DMA暫存器重新設定接收的計數值,這個數量只能大於或者等於可能接收的位元組數,否則當DMA接收計數器遞減到0的時候,又會過載這個計數值,重新迴圈遞減計數,所以接收緩衝區的資料則會被覆蓋丟失。
- 開啟DMA通道,等待下一次的資料接收,注意,對DMA的相關暫存器設定寫入,如第4條的寫入計數值,必須要在關閉DMA的條件進行,否則操作無效。
說明一下,STM32的IDLE的中斷在串列埠無資料接收的情況下,是不會一直產生的,產生的條件是這樣的,當清除IDLE標誌位後,必須有接收到第一個資料後,才開始觸發,一斷接收的資料斷流,沒有接收到資料,即產生IDLE中斷。IDLE位不會再次被置高直到RXNE位被置起(即又檢測到一次空閒匯流排)。RXNE接收中斷可以不用開啟,減少進中斷的次數。

void My_UART_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
DMA_InitTypeDef DMA_InitStruct;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE); // 使能DMA
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // 使能GPIOA
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); // 使能時鐘 複用USART
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct); //初始化 USART_TX 即 GPIOA.9
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct); //初始化 USART_RX 即 GPIOA.10
USART_InitStruct.USART_BaudRate = 115200;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1,&USART_InitStruct); //初始化 USART
// USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 開啟 USART 接收緩衝區非空中斷
// USART_ITConfig(USART1, USART_IT_TXE, ENABLE); // 開啟 USART 傳送緩衝區空中斷
USART_ITConfig(USART1, USART_IT_IDLE, ENABLE); //開啟 USART1 匯流排空閒中斷
USART_Cmd(USART1, ENABLE);//使能USART中斷
DMA_DeInit(DMA1_Channel5);
DMA_InitStruct.DMA_PeripheralBaseAddr = (uint32_t)(&USART1->DR); //外設--->記憶體
DMA_InitStruct.DMA_MemoryBaseAddr = (uint32_t)RxBuffer;
DMA_InitStruct.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStruct.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStruct.DMA_BufferSize = BufferSize;
DMA_InitStruct.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStruct.DMA_M2M = DMA_M2M_Disable;
DMA_InitStruct.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStruct.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStruct.DMA_Priority = DMA_Priority_Medium;
DMA_InitStruct.DMA_Mode = DMA_Mode_Normal;
DMA_Init(DMA1_Channel5, &DMA_InitStruct);
DMA_Cmd(DMA1_Channel5, ENABLE);
USART_DMACmd(USART1, USART_DMAReq_Rx, ENABLE); // 使能 USART1接收DMA
NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0x01; //搶佔優先順序 2位 00 01 10 11
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0x01; //響應優先順序 2位 00 01 10 11
NVIC_Init(&NVIC_InitStruct); //初始化中斷
}
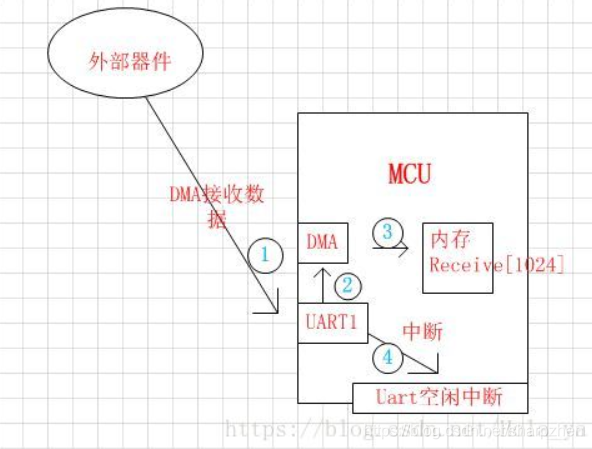
當MCU通過USART接收外部發來的資料時,在進行第①②③步的時候,主程式可以不用管,DMA直接將接收到的資料寫入快取RxBuffer,程式此時也不會進入接收中斷,當資料接收完成之後產生接收空閒中斷,在中斷服務函數中將接收完成標誌位置1,計算出接收快取中的資料長度,清除中斷位,失能DMA防止在處理資料時候接收資料。主程式中檢測到接收完成標誌被置1,進入資料處理程式,現將接收完成標誌位置0,重新設定DMA下次要接收的資料位元組數,使能DMA進入接收資料狀態。
void USART1_IRQHandler(void)
{
uint8_t clear = clear; // 用來消除編譯器的「沒有用到」的提醒
uint8_t data = 0;
if(USART_GetITStatus(USART1, USART_IT_IDLE) != RESET)
{
clear = USART1->SR;
clear = USART1->DR;
// RxCounter = BufferSize - DMA1_Channel5->CNDTR;//快取中的位元組數
RxCounter = BufferSize - DMA_GetCurrDataCounter(DMA1_Channel5);//快取中的位元組數
// USART_ITConfig(USART1, USART_IT_IDLE, ENABLE);
RxStatus = 1; //標記接收到一幀
USART_ClearITPendingBit(USART1, USART_IT_IDLE); // 清除空閒中斷
DMA_Cmd(DMA1_Channel5, DISABLE); // 停止DMA,清除DMA快取
}
}
int main(void)
{
uint8_t i = 0;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 初始化中斷優先順序分組
My_UART_Init();
while(1)
{
if(RxStatus == 1)
{
RxStatus = 0;
i = 0;
while(RxCounter--)
{
USART_SendData(USART1, RxBuffer[i++]);
while(USART_GetFlagStatus(USART1, USART_FLAG_TC) != SET);
}
memset(RxBuffer, 0, i); // 清除快取
RxCounter = 0;
// DMA1_Channel5->CNDTR = BufferSize;
DMA_SetCurrDataCounter(DMA1_Channel5, BufferSize);
DMA_Cmd(DMA1_Channel5, ENABLE);
}
}
}
DMA介紹
DMA的定義
直接記憶體存取(Direct Memory Access,DMA)是電腦科學中的一種記憶體存取技術。它允許某些電腦內部的硬體子系統(電腦外設),可以獨立地直接讀寫系統記憶體,而不需繞道 CPU。在同等程度的CPU負擔下,DMA是一種快速的資料傳送方式。它允許不同速度的硬體裝置來溝通,而不需要依於 CPU的大量中斷請求。
DMA有什麼用?
直接記憶體存取用來提供在外設和記憶體之間或者記憶體和記憶體之間的高速資料傳輸。無須CPU的干預,通過DMA資料可以快速地移動。這就節省了CPU的資源來做其他操作。
有多少個DMA資源?
有兩個DMA控制器,DMA1有7個通道,DMA2有5個通道。
資料從什麼地方送到什麼地方?
- 外設到SRAM(I2C/UART等獲取資料並送入SRAM);
SRAM的兩個區域之間; - 外設到外設(ADC讀取資料後送到TIM1控制其產生不同的PWM佔空比);
- SRAM到外設(SRAM中預先儲存的資料送入DAC產生各種波形);
DMA可以傳遞多少資料?
傳統的DMA的概念是用於大批次資料的傳輸,但是我理解,在STM32中,它的概念被擴充套件了,也許更多的時候快速是其應用的重點。資料可以從1~65535個。
DMA控制器與仲裁器
現在越來越多的微控制器採用DMA技術,提供外設和記憶體之間或者記憶體之間的高速資料傳輸。當 CPU 初始化這個傳輸動作,傳輸動作本身是由 DMA 控制器 來實行和完成。STM32就有一個DMA控制器,它有7個通道,每個通道專門用來管理一個或多個外設對記憶體存取的請求,還有一個仲裁器來協調各個DMA請求的優先權。
DMA 控制器和Cortex-M3核共用系統資料匯流排執行直接記憶體資料傳輸。當CPU和DMA同時存取相同的目標(RAM或外設)時,DMA請求可能會停止 CPU存取系統匯流排達若干個週期,匯流排仲裁器執行迴圈排程,以保證CPU至少可以得到一半的系統匯流排(記憶體或外設)頻寬。
在發生一個事件後,外設傳送一個請求訊號到DMA控制器。DMA控制器根據通道的優先權處理請求。當DMA控制器開始存取外設的時候,DMA控制器立即傳送給外設一個應答訊號。當從DMA控制器得到應答訊號時,外設立即釋放它的請求。一旦外設釋放了這個請求,DMA控制器同時復原應答訊號。如果發生更多的請求時,外設可以啟動下次處理。
程式碼展示
基於HAL庫的串列埠空閒+DMA主要接收程式碼
下面是標頭檔案
#ifndef DMAT_H
#define DMAT_H
#include "stm32f1xx_hal.h"
#include "usart.h"
extern uint8_t usart2_rx_buffer[33];
extern uint8_t usart3_rx_buffer[25];
void MyU2Init(void);
void MyU3Init(void);
void USART2Handle(void);
void USART3Handle(void);
void MyUsartHandle(UART_HandleTypeDef *HUART);
#endif
下面是原始檔
#include "dmat.h"
uint8_t usart2_rx_buffer[33]={0};
uint8_t usart3_rx_buffer[25]={0};
float ROLL_ANGLE=0;
float PITCH_ANGLE=0;
float YAW_ANGLE=0;
void MyU2Init(void)
{
__HAL_UART_CLEAR_IDLEFLAG(&huart2);
__HAL_UART_ENABLE_IT(&huart2,UART_IT_IDLE);
HAL_UART_Receive_DMA(&huart2,usart2_rx_buffer,33);
}
void MyU3Init(void)
{
__HAL_UART_CLEAR_IDLEFLAG(&huart3);
__HAL_UART_ENABLE_IT(&huart3,UART_IT_IDLE);
HAL_UART_Receive_DMA(&huart3,usart3_rx_buffer,25);
}
//可以在裡面加上想要的功能
//以及資料處理的程式碼
//這是採用串列埠+DMA+空閒中斷來處理串列埠接收的資料
void USART2Handle(void)
{
if(usart2_rx_buffer[0]==0x55&&usart2_rx_buffer[11]==0x55&&usart2_rx_buffer[22]==0x55)
{
//總共33個位元組的資料,每11個位元組的資料算一個封包,三個封包分別是加速度包,角速度包和角度包
if(usart2_rx_buffer[23]==0x53)
{
//下面的資料是針對角度包來解析的,得到三個角度
ROLL_ANGLE=((int16_t)(usart2_rx_buffer[25]<<8|usart2_rx_buffer[24]))/32768.0*180;
PITCH_ANGLE=((int16_t)(usart2_rx_buffer[27]<<8|usart2_rx_buffer[26]))/32768.0*180;
YAW_ANGLE=((int16_t)(usart2_rx_buffer[29]<<8|usart2_rx_buffer[28]))/32768.0*180;
}
}
}
void USART3Handle(void)
{
}
void MyUsartHandle(UART_HandleTypeDef *HUART)
{
if(HUART==&huart2)
{
if(__HAL_UART_GET_FLAG(HUART,UART_FLAG_IDLE))
{
__HAL_UART_CLEAR_IDLEFLAG(HUART);
HAL_UART_DMAStop(HUART);
USART2Handle();
HAL_UART_Receive_DMA(HUART,(uint8_t*) usart2_rx_buffer,33);
}
}
else if(HUART==&huart3)
{
if(__HAL_UART_GET_FLAG(HUART,UART_FLAG_IDLE))
{
__HAL_UART_CLEAR_IDLEFLAG(HUART);
HAL_UART_DMAStop(HUART);
USART3Handle();
HAL_UART_Receive_DMA(HUART,(uint8_t*) usart2_rx_buffer,25);
}
}
}